

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Задача 4.1. Центры масс шатуна 2 и ползуна 3 кривошипноползунного механизма лежат на серединах этих звеньев. Массы шатуна 2 и ползуна 3 находятся в соотношении m3 =0,6 m2 . Найти значения и направления действия сил инерции и моментов пар сил инерции звеньев кривошип- но-ползунного механизма, если масса шатуна m2 =3,4 кг. Данные для по-
строения кинематической механизма схемы взять из задачи 3.1.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кривошипно-ползунного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.1, а).
2)Для полученной кинематической схемы строим план ускорений
всоответствующем масштабном коэффициенте (рис. 4.1, б).
3)Сила инерции определяется по формуле
|
Fиi |
= mi aSi |
, |
(4.1) |
где mi − масса i-го звена; aSi |
− ускорение центра масс i-го звена. |
|
||
Используя теорему подобия, определим положение точки s2 |
на плане |
|||
ускорений (рис. 4.1, б). Соединив точку s2 |
с полюсом плана ускорений точ- |
|||
кой π, получим вектор ускорения центра масс шатуна 2, значение которого найдем по выражению, м/с2,
aS2 = πs2 μa =51 48 = 2448 ,
где πs2 – отрезок, соединяющий точки π и s2 на плане ускорений и изображающий вектор ускорения центра масс aS2 шатуна 2 (рис. 4.1, б).
Вектор ускорения центра масс ползуна 3 совпадает с вектором ускорения точки В, тогда aS3 =aB =2736 м/с2.
Силы инерции шатуна 2 и ползуна 3 найдем согласно формуле (4.1), H:
Fи2 = m2 aS2 =3,4 2424 =8241,6 ,
Fи3 = 0,6 m2 aS3 = 0,6 3,4 2736 =5581,44 .
Вектора сил инерции Fи2 и Fи3 (рис. 4.1, а) лежат на прямых, парал-
лельныхG G, соответственно, линиям действия векторов ускорений центров масс aS2 и aS3 (рис. 4.1, б), а направление действия этих векторов противополож-
но направлению действия векторов ускорений центров масс этих звеньев.
Теория механизмов и машин. Практикум |
-71- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
1 |
A |
2 |
|
|
|
O |
|
|
0 aS2 |
aS3 |
|
SМ2 и2 Fи2
|
B, S3 |
ε2 |
3 0 |
μl = 0,01 ммм
Fи3
|
|
|
|
|
|
м |
a |
|
|
|
|
|
|
|
|
|
|
|
μ |
a |
= 48 |
|
|
|
μ |
|
= 0,01 |
м |
|
||
|
|
|
|
|
мм c2 |
|
|
|
|
l |
|
|
мм |
|
|
|
|
b, s3 |
|
|
aG |
aGB ≡aS3 |
|
π |
|
|
|
Ми |
|
|
|
Gτ |
G |
|
|
|
|
|
A 2 |
2 |
Fи2 |
||||||
|
|
|
|
|
|
||||||||||
aBA |
aBA |
|
|
|
|
|
|
|
|
|
|
||||
S2 |
|
|
|
|
|
|
|
S2 |
|
aGBAτ |
|||||
n1 |
|
aGBAn |
s2 |
|
|
aGA ≡ aAOn |
|
0 |
aS2 |
|
|
||||
|
|
|
|
|
|
ε2 |
B |
||||||||
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
Рис. 4.1. К определению инерциальных параметров |
|
|
||||||||
|
|
|
|
|
|
кривошипно-ползунного механизма |
|
|
|
|
|
||||
|
|
4) Момент пары сил инерции вычисляется по формуле |
|
|
|||||||||||
|
|
|
|
|
|
|
Mи |
i |
= JS εi , |
|
|
|
|
|
(4.2) |
|
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
где JS |
i |
− момент инерции i-го звена; εi − угловое ускорение i-го звена. |
|||||||||||||
|
Момент инерции i-го звена определяется по формуле |
|
|
||||||||||||
|
|
|
|
||||||||||||
|
|
|
|
|
|
J |
= 0,083 m l2 , |
|
|
|
|
|
(4.3) |
||
|
|
|
|
|
|
|
Si |
|
i i |
|
|
|
|
|
|
где mi |
− масса i-го звена; li − длина i-го звена. |
|
|
|
|
|
|
||||||||
|
|
Момент инерции шатуна 2 согласно формуле (4.3), кг м2 , равен |
|||||||||||||
JS2 = 0,083 m2 lАВ = 0,083 3,4 0,342 =0,03.
Угловое ускорение шатуна 2, с-2, равно
ε |
2 |
= |
aBAτ |
= |
|
|
n1b |
|
μa |
= |
20,5 48 |
= 2894,12 . |
|
|
|||||||||||
|
|
|||||||||||
lAB |
|
|
lAB |
|
||||||||
|
|
|
|
|
0,34 |
|
||||||
|
|
|
|
|
|
|
||||||
Для определения направления действия углового ускорения ε2 перенесем вектор тангенциального ускорения aGBAτ шатуна 2 в точку B (рис. 4.1, в).
При этом точка A считается условно неподвижной. В этом случае полученная система будет совершать вращательные движения вокруг условно неподвиж-
Теория механизмов и машин. Практикум |
-72- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
ной точки A в направлении, противоположном направлению действия часовой стрелки. Найденное направление вращения звена и есть направление действия углового ускорения шатуна 2.
Угловая скорость кривошипа 1 является постоянной величиной, следовательно, угловое ускорение этого звена равно нулю, т. е. ε1 =0, тогда со-
гласно формуле (4.2) имеем, H м,
Mи1 = JS1 ε1 = JS1 0 =0 .
Ползун 3 совершает только поступательные движения, следовательно, угловое ускорение этого звена равно нулю, т. е. ε3 = 0 , тогда согласно фор-
муле (4.2) найдем момент пары сил инерции ползуна 3, H м:
Mи3 = JS3 ε3 = JS3 0 = 0 .
Момент пары сил инерции шатуна 2 найдем согласно формуле (4.2),
H м:
Mи2 = JS2 ε2 = 0,033 2894,12 =95,51.
Направление действия момента пары сил инерции Mи2 противопо-
ложно направлению действия углового ускорения ε2 . Следовательно, момент
пары сил инерции шатуна 2 действует в направлении хода часовой стрелки
(рис. 4.1, в).
Задача 4.2. Центры масс шатуна 2 и коромысла 4 шарнирного механизма лежат на серединах этих звеньев. Массы шатуна 2 и коромысла 4 находятся в соотношении m3 =0,6 m2 . Найти значения и направления действия
сил инерции и моментов пар сил инерции звеньев шарнирного механизма, если масса шатуна 2 m2 =4,5 кг. Данные для построения кинематической
схемы механизма взять из задачи 3.2.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему шарнирного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.2, а).
2)Для полученной кинематической схемы строим план ускорений
всоответствующем масштабном коэффициенте (рис. 4.2, б).
3)Используя теорему подобия, определим положение точек s2 и s3
на плане ускорений (рис. 4.2, б). Соединив точки s2 и s3 с полюсом плана
ускорений точкой π, получим вектора ускорения центра масс шатуна 2 и коромысла 3, м/с2:
aS2 = πs2 μa = 47 15 = 705,0, aS3 = πs3 μa = 26 15 =390,0 ,
где πs2 , πs3 – отрезки с плана ускорений (рис. 4.2, б).
Теория механизмов и машин. Практикум |
-73- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Силы инерции шатуна 2 и коромысла 3 найдем согласно формуле
(4.1), H:
Fи2 = m2 aS2 = 4,5 705 =3172,5 3 Fи3 = 0,6 m2 aS3 = 0,6 4,5 390 =1053 .
Вектора сил инерции Fи2 и Fи3 (рис. 4.2, а), соответственно, лежат
наG прямыхG , параллельных линиям действия векторов ускорений центров масс aS2 и aS3 (рис. 4.2, б), а направление действия этих векторов противоположно
направлению действия векторов ускорений центров масс этих звеньев.
4) Моменты инерции шатуна 2 и коромысла 3 определим согласно выражению (4.3), кг м2 :
JS2 = 0,083 m2 lAB2 =0,083 4,5 0,402 = 0,059 ,
JS3 = 0,083 m3 lBO2 1 = 0,083 0,85 m2 lBO2 1 = 0,083 0,85 4,5 0,352 = 0,04 .
Угловые ускорения шатуна 2 и коромысла 3, с-2, вычислим по формулам
|
ε |
2 |
= |
aBAτ |
|
= |
|
|
|
n1b |
|
μa |
= |
37 15 |
=1387,5 , |
|||||||||
|
|
|
||||||||||||||||||||||
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
lAB |
|
|
|
|
|
|
lAB |
|
|
|
0,40 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
aBOτ |
|
|
|
n b |
|
μ |
a |
|
|
50 15 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
ε |
3 |
= |
1 |
|
= |
|
|
2 |
|
|
|
|
= |
|
|
|
= 2142,86 . |
|||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
lBO |
|
|
|
|
|
lBO |
|
0,35 |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
1 |
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||
Для определения направлений действия угловых ускорений ε2 и ε3 перенесем вектора тангенциальных ускорений aGBτA и aGBOτ 1 соответственно
вточку B (рис. 4.2, в, г). При этом точка A считается условно неподвижной.
Вэтом случае полученные системы будут совершать вращательные движе-
ния, соответственно, вокруг неподвижных точек A и O1 в направлении, противоположном направлению действия часовой стрелки. Данные направления движений и есть направления действия угловых ускорений этих звеньев.
Угловая скорость кривошипа 1 является постоянной величиной, следовательно, угловое ускорение этого звена равно нулю, т. е. ε1 = 0 , тогда со-
гласно выражению (4.2) имеем, H м,
Mи1 = JS1 ε1 = JS1 0 =0 .
Моменты пары сил инерции шатуна 2 и коромысла 3 найдем согласно выражению (4.2), H м:
Mи2 = JS2 ε2 = 0,059 1387,5 =81,86 ,
Mи3 = JS3 ε3 =0,04 2142,86 =85,71.
Теория механизмов и машин. Практикум |
-74- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
|
|
ε2 |
Fи2 |
B |
|
|
|
|
A |
|
2 |
|
S2 |
|
|
μ |
|
||
|
|
|
|
Ми2 |
|
ε3 |
l |
||||
|
|
|
|
|
|
|
|
|
|||
1 |
|
|
|
G |
|
|
|
F |
|
||
|
|
|
aS2 |
|
G |
S3 3 |
М |
и3 |
|
||
|
|
|
|
|
|
aS3 |
и3 |
|
|||
O |
|
|
|
|
|
|
|
O1 |
|
A |
|
0 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
0 |
|
|
|
|
|
|
м |
|
|
|
|
|
|
μ |
a |
=15 |
|
|
|
|
|
|
|||
|
|
|
|
мм c2 |
|
|
|
|
|||
G |
|
|
|
s |
|
aGS |
|
π |
|
|
|
b aB |
|
|
|
3 |
|
3 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
aGS2 |
|
|
aBOn |
|
|
||
|
|
|
|
|
aGBOτ 1 n2 |
1 |
|
|
|||
s2 |
|
|
G |
|
|
|
|
||||
|
|
|
|
aGA ≡ aAOn |
|
|
|
||||
aGBAτ |
|
|
aBA |
|
|
|
|
||||
n |
|
Gn |
a |
|
|
|
|
|
|
|
|
1 |
aBA |
|
|
|
|
|
|
|
|
||
= 0,01 ммм
ε2  aGBAτ
aGBAτ
 B
B
2 S2 М и2
и2
в
μl = 0,01 ммм
aGBOτ 1 
 B
B
ε3 
S3 
 М
М
3 |
и |
3 |
|
||
|
|
O1
0 
б |
г |
Рис. 4.2. К определению инерциальных параметров шарнирного механизма
Направления действия моментов пар сил инерции Mи2 и Mи3 , соот-
ветственно, противоположны направлениям действия угловых ускорений ε2 и ε3 . Следовательно, направление действия моментов пары сил инерции ша-
туна 2 и коромысла 4 противоположно направлению действия часовой стрел-
ки (рис. 4.2, а).
Задача 4.3. Центры масс ползуна 2 и кулисы 3 кулисного механизма лежат на серединах этих звеньев. Массы кулисы 3 и ползуна 2 находятся в соотношении m2 = 0,38 m3 . Найти значения и направления действия сил
инерции и моментов пар сил инерции звеньев кулисного механизма, если масса кулисы m3 = 4,25 кг. Данные для построения кинематической схемы
механизма взять из задачи 3.3.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кулисного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.3, а).
Теория механизмов и машин. Практикум |
-75- |

4.СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
2)Для полученной кинематической схемы строим план ускорений
всоответствующем масштабном коэффициенте (рис. 4.3, б).
3)Используя теорему подобия, определим положение точки s3 на
плане ускорений (рис. 4.3, б). Соединив точку s3 с полюсом плана ускорений точкой π, получим вектор ускорения центра масс кулисы 3, м/с2:
aS3 = πs3 μa =13 1,54 = 20,02 ,
где πs3 – отрезок с плана ускорений (рис. 4.3, б).
Вектор ускорения центра масс ползуна 2 совпадает с вектором уско-
рения точки В, тогда aS2 = aB =38,5 м/с2.
Силы инерции ползуна2 и кулисы3 найдем согласно выражению (4.1),
H:
Fи3 = m3 aS3 = 4,25 20,02 =85,08,
Fи2 = m2 aS2 = 0,38 m3 aS2 = 0,38 4,25 38,5 = 62,18.
Вектора сил инерции Fи2 и Fи3 (рис. 4.3, а), соответственно, лежат
наG прямыхG , параллельных линиям действия векторов ускорений центров масс aS2 и aS3 (рис. 4.3, б), а направление действия этих векторов противоположно
направлению действия векторов ускорений центров масс этих звеньев.
4) Моменты инерции ползуна 2 и кулисы 3 определим согласно выражению (4.3), кг м2 :
JS3 =0,083 m3 lBO2 1 = 0,083 4,25 0,352 = 0,043,
JS2 = 0,083 m2 lAB2 = 0,083 0,38 m3 lAB2 = 0,083 0,38 4,25 02 = 0 .
Угловое ускорение кулисы 3 и ползуна 2, с-2, вычислим по формуле
|
aÂOτ |
6,16 |
|
|
ε3 = ε2 = |
1 |
= |
0,35 |
=17,6 . |
|
||||
|
lÂO |
|
||
|
1 |
|
|
|
Для определения направления действия угловых ускорений ε2 и ε3 перенесем вектор тангенциального ускорения аGBOτ 1 в точку В (рис. 4.3, в).
При этом разрывается связь между кривошипом 1 и ползуном 2. В этом случае точка В совместно с ползуном 2 и кулисой 3 под действием вектора аGBOτ 1
получают возможность совершать вращательное движение в направлении действия этого вектора вокруг неподвижной точки O1 (рис. 4.3, а). Получен-
ные направления вращательных движений ползуна 2 и кулисы 3 и будут являться направлениями действий угловых ускорений данных звеньев.
Теория механизмов и машин. Практикум |
-76- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Ми2 |
Fи2 |
Fи3 |
|
м |
≡ Ми3 |
μl |
= 0,01 |
||
|
ε3 ≡ ε2 |
мм |
||
|
|
|
aGS2  aGS3
aGS3
μ |
a |
=1,54 |
м |
|
|
μ |
l |
= 0,01 |
м |
|
|
|
мм с2 |
|
|
|
|
|
мм |
||
aGBτО |
aGBOn 1 |
π, о, о1 |
Ми ≡ Ми |
|
|
|
Gτ |
|||
|
аC |
2 |
|
3 |
|
|||||
|
|
1 |
|
|
|
|
|
|
|
aBО |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
аB |
|
|
|
|
|
1 |
|
|
Gr |
|
|
|
|
|
ε3 ≡ ε2 |
||
|
|
aBA |
аGА ≡ аGAOn |
|
|
|
|
|
|
|
aGBAk |
|
aG |
|
|
|
|
|
|
||
|
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.3. К определению инерциальных параметров кулисного механизма
Угловая скорость кривошипа 1 является постоянной величиной, следовательно, угловое ускорение этого звена равно нулю, т. е. ε1 = 0 , тогда со-
гласно выражению (4.2) имеем, H м,
Mи1 = JS1 ε1 = JS1 0 = 0 .
Момент пары сил инерции кулисы 3 найдем по выражению (4.2), H м:
Mи3 = JS3 ε3 =0,043 17,60 =0,757 .
Ползун 3 совершает только поступательные движения, следовательно, угловое ускорение этого звена равно нулю, т. е. ε3 = 0 , значит момент пары
сил инерции ползуна 2 равен нулю.
Направление действия момента пар сил инерции Mи3 противополож-
но направлениям действия углового ускорения ε3 . Следовательно, направле-
ние действия моментов пары сил инерции кулисы 3 противоположно направлению действия часовой стрелки (рис. 4.4, а).
Теория механизмов и машин. Практикум |
-77- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Задача 4.4. Считая, что центры масс шатуна 2 и ползуна 3 кривошип- но-ползунного механизма лежат на середине этих звеньев, а кривошипа совпадает с осью вращения точкой О, найти значения и направления действия сил инерции и моменты пар сил инерции звеньев. Данные для построения кинематической схемы взять: для рис. 2.10 в табл. 2.1; для рис. 2.11 в
табл. 2.2; для рис. 2.12 в табл. 2.3; для рис. 2.13 в табл. 2.4; для рис. 2.14 в
табл. 2.5; для рис. 2.15 в табл. 2.6., для построения планов скоростей и ускорений – из условия задачи 3.5, соотношение масс звеньев и значение силы полезного сопротивления – в табл. 4.1.
|
|
|
|
|
|
Таблица 4.1 |
|
|
|
|
|
|
|
Вариант |
1 |
2 |
3 |
4 |
5 |
|
|
m2 |
6,2 |
10,1 |
12,1 |
9,35 |
3,85 |
Масса, кг |
m1 |
0, 25 m2 |
0,18 m2 |
0,1 m2 |
0,3 m2 |
0, 45 m2 |
|
m3 |
0,7 m2 |
0,55 m2 |
0, 4 m2 |
0,85 m2 |
0,9 m2 |
Сила полезного |
|
|
|
|
|
|
сопротивления |
1800 |
4500 |
5200 |
4250 |
380 |
|
FПС, Н·м |
|
|
|
|
|
|
Задача 4.5. Считая, что центры масс шатуна 2 и коромысла 3 шарнирного механизма лежат посередине этих звеньев, а кривошипа совпадает с осью вращения точкой О, найти значения и направления действия сил инерции и моменты пар сил инерции звеньев. Данные для построения кинематической схемы взять: для рис. 2.20 в табл. 2.7; для рис. 2.21 в табл. 2.8; для рис. 2.22 в табл. 2.9; для рис. 2.23 в табл. 2.10; для рис. 2.24 в табл. 2.11; для рис. 2.25 в табл. 2.12., для построения планов скоростей и ускорений – из условия задачи 3.6, соотношение масс звеньев и значение силы полезного сопротивления – в табл. 4.2.
|
|
|
|
|
|
Таблица 4.2 |
|
|
|
|
|
|
|
Вариант |
1 |
2 |
3 |
4 |
5 |
|
|
m2 |
5,8 |
7,4 |
12,5 |
8,3 |
10,5 |
Масса, кг |
m1 |
0,35 m2 |
0,16 m2 |
0, 21 m2 |
0, 25 m2 |
0,5 m2 |
|
m3 |
0,8 m2 |
0,75 m2 |
0,8 m2 |
0,68 m2 |
0,95 m2 |
Сила полезного |
|
|
|
|
|
|
сопротивления |
4150 |
200 |
375 |
400 |
3850 |
|
FПС, Н·м |
|
|
|
|
|
|
Задача 4.6. Считая, что центры масс звеньев 2 и 3 плоского рычажного механизма лежат на середине этих звеньев, а звена 1 совпадает с осью вращения точкой О, найти значения и направления действия сил инерции и моменты пар сил инерции звеньев. Данные для построения кинематической схемы взять: для рис. 2.22 в табл. 2.13; для рис. 2.23 в табл. 2.14; для рис. 2.24 в табл. 2.15; для рис. 2.25 в табл. 2.16; для рис. 2.26 в табл. 2.17; для рис. 2.27 в табл. 2.18, для построения планов скоростей и ускорений – из ус-
Теория механизмов и машин. Практикум |
-78- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
ловия задачи 3.7, соотношение масс звеньев и значение силы полезного сопротивления – в табл. 4.3.
|
|
|
|
|
|
Таблица 4.3 |
|
|
|
|
|
|
|
Вариант |
1 |
2 |
3 |
4 |
5 |
|
|
m1 |
0,7 m2 |
0,55 m2 |
0, 45 m2 |
0,9 m2 |
0,85 m2 |
Масса, кг |
m2 |
0,18 m2 |
0, 25 m2 |
0,3 m2 |
0,1 m2 |
0, 4 m2 |
|
m3 |
6,2 |
3,85 |
9,35 |
10,1 |
12,1 |
Сила полезного |
|
|
|
|
|
|
сопротивления |
400 |
220 |
410 |
3200 |
3800 |
|
FПС, Н·м |
|
|
|
|
|
|
Задача 4.7. Подвижные звенья 2 и 3 образуют со звеньями 1 и 4 структурную группу 2-го класса 1-го вида (рис. 4.4, а). Используя графоаналитический метод, найти реакции кинематических пар, если lAB =0,40 м,
lBC =0,20 м, |
lAS |
2 |
=0,20 м, |
lBS |
=0,10 м, Fи |
2 |
= 250 Н, Fи |
=300 Н, |
Mи =50 Н м, |
||||||||
|
|
|
|
|
|
|
3 |
|
|
|
|
3 |
|
|
2 |
||
M =60 |
Н м, ϕ |
1 |
=55D , ϕ |
2 |
=140D , ϕ |
3 |
=120D |
, ϕ |
4 |
=60D, m |
2 |
=3,5 кг, m =4,0 кг. |
|||||
и |
|
|
|
|
|
|
|
|
|
|
3 |
||||||
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Р е ш е н и е. 1) По заданным геометрическим параметрам построим кинематическую схему структурной группы звеньев (рис. 4.4, а). Приняв AB = 40 мм, определим масштабный коэффициент длин, м/мм:
|
|
|
|
|
|
|
|
|
|
|
μ |
l |
|
= lAB |
= 0,4 = 0,01. |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
AB |
40 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
ε2 |
B |
|
|
|
ε3 |
3 ϕ4 |
|
|
|
μl = 0,01 |
м |
|
|
μF = 6,66 |
H |
||
|
|
|
|
ϕ3 |
|
|
S3 |
|
ϕ2 |
|
мм |
|
|
|
мм |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
τ |
G |
Rn |
||||||
|
|
2 S2 |
|
aGS GG C |
|
|
|
4 |
|
|
|
R43 |
43 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
3 |
|
3 |
|
|
|
|
|
|
|
|
|
R43 |
|
|
A |
|
|
G2 |
aS |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ϕ1 1 |
|
|
a |
|
|
|
|
|
|
|
м |
|
|
R23 ≡ R32 |
|
|||
|
|
|
|
|
|
|
|
|
μl |
|
= 0,01 |
|
F |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
h2 |
|
|
|
|
|
||||||
|
|
|
|
h1 |
|
B |
|
|
Fи3 |
|
|
|
мм |
|
и3 |
|
|
|
|||
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
Mи2 |
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|||
|
|
FGи2 |
|
|
|
|
|
|
M |
и |
|
|
|
|
G |
|
|
|
|||
|
|
|
|
|
|
|
|
S3 C |
|
3 |
|
n |
|
3 |
F |
R12 Gn |
|
||||
|
|
|
S |
2 |
|
|
G |
G |
|
R |
|
|
|
и2 |
|
R |
|
||||
|
|
2 |
|
|
|
|
|
43 |
|
|
|
|
12 |
|
|||||||
|
|
|
h3 |
|
|
|
3 |
R43τ |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
h4 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
G |
A |
|
GG2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Gτ |
|
|
|
R12n |
|
|
Rτ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R12 |
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
Рис. 4.4. Силовой анализ структурной группы звеньев 2-го класса 1-го вида
Теория механизмов и машин. Практикум |
-79- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Переводим остальные геометрические параметры в масштабный коэффициент длин, мм:
BC = lBC = 0,20 = 20 , μl 0,01
|
AS |
2 |
|
= |
lAS |
2 |
= |
0,20 |
= 20, |
|||
|
|
|||||||||||
|
|
μ |
l |
|
0,01 |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ВS |
3 |
|
|
= |
lBS |
3 |
= |
0,10 |
=10 . |
||
|
|
|
||||||||||
|
|
|
μ |
l |
0,01 |
|||||||
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||
2) Нанеся на кинематическую схему структурной группы звеньев заданные силовые факторы, составим расчетную схему (рис. 4.4, б).
Силы тяжести звеньев 2 и 3, H, вычислим по формулам
G2 = m2 q =3,5 9,81 =34,34 , G3 = m3 q = 4,0 9,81 =39,24 .
Моменты пар сил инерции Mи2 и Mи3 направляем противоположно
направлениям действия угловых ускорений ε2 и ε3 соответственно. Вектора сил инерций прикладываем к центрам масс звеньев – точкам S2 и S3 соот-
ветственно, при этом их направления действия являются противоположными заданным направлениям действия ускорений центров масс этих же звеньев (рис. 4.4, а). В результате полученная картина будет являться расчетной схемой структурной группы звеньев (рис. 4.4, б).
3) Для определения реакций в шарнирах A и C отбросим звенья 1 и 4, а их действияG Gна оставшиеся звенья 2 и 3 заменим соответствующими реак-
циями R12 и R43 . Для реакций R12 и R43 известны только точки их приложе-
ния. Разложим неизвестные реакции R12 |
и R43 шарниров A и C, соответст- |
||||||||||
венно, на составляющие |
RGn , |
Rτ |
и Rn , Rτ |
(рис. 4.4, б). |
|
|
|||||
|
|
12 |
12 |
|
43 |
43 |
|
|
|
|
|
|
Уравнение равновесия полученной системы имеет вид |
|
|
||||||||
|
RGn + RGτ +G + FG |
+GG |
+ FG |
+ RGτ |
+ RGn =0 . |
|
(4.4) |
||||
|
12 |
12 |
2 |
è 2 |
3 |
|
è 3 |
43 |
43 |
|
|
|
Уравнение равновесия (4.4) |
содержит четыре неизвестных: Rn |
, |
Rτ , |
|||||||
RGn |
|
|
|
|
|
|
|
|
12 |
|
12 |
, RGτ , следовательно, статическая неопределимость системы равна трем. |
|||||||||||
43 |
43 |
|
|
|
|
|
|
|
|
|
|
|
С целью раскрытия статической неопределимости найдем значения |
||||||||||
тангенциальных составляющих реакций Rτ |
и Rτ . |
|
|
|
|||||||
|
Звено 2 ∑m(Fi )B |
=0 , или |
|
|
12 |
|
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
R12τ lAB + Mи2 − Fи2 h1 +G2 h3 = 0 ,
где плечи моментов, м:
Теория механизмов и машин. Практикум |
-80- |
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
h1 = |
|
h1 |
|
μl =18 0,01 = 0,18 , |
|||||
|
|
|
|
|
|
||||||||
|
|
|
|
h3 = |
|
h3 |
|
μl =11,5 0,01 =0,115 . |
|||||
|
|
|
|
|
|
||||||||
|
Величина тангенциальной составляющей реакции в шарнире А |
||||||||||||
Rτ |
|
= |
Fèí 2 h1 − Mèí 2 |
−G2 h3 |
= 250 0,18 −50 −34,34 0,115 = −22,37 H . |
||||||||
|
|
|
|||||||||||
12 |
|
lAB |
0,40 |
||||||||||
|
|
|
|||||||||||
Звено 3: ∑m(Fi )B =0 , или
Fè 3 h2 − R43τ lBC − Mè3 −G3 h4 = 0 ,
где плечи моментов, м,
h2 = h2 μl =9 0,01 = 0,09 , h4 = h4 μl = 7 0,01 = 0,07 .
Величина тангенциальной составляющей реакции в шарнире C, H,
Rτ |
= |
Fè3 h2 − Mè |
3 −G2 h4 |
= 300 0,09 −60 −39,24 0,07 = −187,73. |
|
|
|||
43 |
|
lBC |
|
0,20 |
|
|
|
Знак «−» обоихGтангенциальных составляющих реакций R12τ и R43τ означает, что вектора R12τ и R43τ в действительности направлены противопо-
ложно направлению, указанному на рис. 4.4, б.
В результате проведенных вычислений в уравнении равновесия (4.4) осталось только две неизвестные – R12n , R43n которые являются нормальными
составляющими реакций в шарнирах А и С, следовательно, статическая неопределимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм, определим по формуле
μF = Fxи3 = 30045 = 6,66 .
Переведем в масштабный коэффициент плана сил остальные силы,
мм:
|
|
Rτ |
|
|
= |
|
R43τ |
|
= |
187,73 |
= 28,19 ≈ 28 , |
||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
43 |
|
|
|
|
|
|
|
μF |
|
|
|
|
6,66 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
G |
2 |
|
= |
|
G2 |
|
|
= |
34,34 =5,16 ≈5 , |
||||||||||||
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
μ |
F |
|
|
6,66 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
F |
|
|
|
= |
Fин |
= |
250 |
|
=37,54 |
≈37 , |
||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
ин2 |
|
|
|
|
|
μ |
F |
|
|
6,66 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Теория механизмов и машин. Практикум |
-81- |
||||||||||||||||||||||||

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
G |
|
|
= |
G3 |
= |
39,24 |
|
=5,89≈ 6 , |
||||
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
3 |
|
|
|
|
μ |
F |
|
|
6,66 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rτ |
|
|
= |
R12τ |
|
= |
22,37 |
=3,36 ≈3 . |
||||||
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
12 |
|
|
|
|
μF |
|
|
6,66 |
|
|
||||
|
|
|
|
|
|
|
|
|
||||||||
По полученным величинам строим план сил в выбранном масштабном |
||||||||||||||||
коэффициенте (рис. 4.4, в).
Отсюда значения нормальных составляющих реакций, H, равны
|
|
|
|
|
Rn |
= |
|
|
|
Rn |
μ |
F |
=31 6,66 = 206,46 , |
|||||||
|
|
|
|
|
43 |
|
|
|
43 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
Rn |
= |
|
|
|
Rn |
|
|
|
|
μ |
F |
= 77 6,66 =512,82 . |
|||
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
12 |
|
|
|
12 |
|
|
|
|
|
|
|
||||
|
|
Значения полных реакций в шарнирах А и С, H, равны |
||||||||||||||||||
|
|
|
|
|
R43 = |
|
R43 |
|
μF = 42 6,66 = 279,72 , |
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
R12 = |
|
R12 |
|
|
μF = 77 6,66 =512,82 . |
||||||||||
|
|
|
|
|
|
|
||||||||||||||
|
|
С |
целью определения |
реакции в шарнире ВGсоединим на плане |
||||||||||||||||
сил вершину вектора реакции R43 с началом вектора G3 . Замерив получен- |
||||||||||||||||||||
ный отрезок, найдем значение реакции в шарнире В, H: |
||||||||||||||||||||
|
|
|
|
|
R23 = R32 = |
|
R23 |
|
μF = 73 6,66 = 486,18, |
|||||||||||
|
|
|
|
|
|
|
||||||||||||||
где |
|
R23 |
|
|
− отрезок с плана сил (рис. 4.4, в). |
|||||||||||||||
|
|
|||||||||||||||||||
Задача4.8. Подвижные звенья 2 и 3 образуют со звеньями 1 и 4 структурную группу 2-гокласса 2-говида (рис. 4.5, а). Используя графоаналитический метод, найти реакции в кинематических парах, если lAB = 0,50 м, lBC = 0,35 м,
lAS2 = 0,25 м, lВS3 =0,175 м, Fи2 = 200 Н, Fи3 =380 Н, Mи2 =45 Н м, Mи3 =70 Н м, ϕ1 = 70D , ϕ2 =120D , ϕ3 = 200D , ϕ4 =100D , m2 =4,2 кг, m3 =5,4 кг.
Р е ш е н и е. 1) По заданным геометрическим параметрам построим кинематическую схему структурной группы звеньев (рис. 4.5, а). Приняв AB =50 мм, определим масштабный коэффициент длин, м/мм:
μ |
l |
= |
|
lAB |
|
= |
0,50 |
= 0,01. |
|
AB |
|
|
|||||
|
|
|
50 |
|
||||
|
|
|
|
|
||||
Переводим остальные геометрические параметры в масштабный коэффициент длин, мм:
BC = lBC = 0,35 =35, μl 0,01
Теория механизмов и машин. Практикум |
-82- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
AS |
2 |
|
= |
lAS |
2 |
= |
0,25 |
= 25 , |
||||||||
|
|
|
||||||||||||||||
|
|
|
|
μ |
l |
|
0,01 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
lBS |
|
|
|
|
|
|
|
|
||||
ВS |
3 |
|
= |
|
3 |
|
= |
|
0,175 |
=17,5 ≈17 . |
||||||||
|
|
|
||||||||||||||||
|
|
|
μ |
l |
|
|
0,01 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
2) Нанеся на кинематическую схему структурной группы звеньев заданные силовые факторы, составим расчетную схему (рис. 4.5, б).
Силы тяжести звеньев 2 и 3, H, вычислим по формулам
G2 = m2 q = 4,2 9,81 = 41,2 , G3 = m3 q =5,4 9,81 =52,97 .
|
|
B |
ε3 |
μ |
l |
= 0,01 |
м |
|
μ |
F |
= 4,87 |
H |
|
|
|
G |
|
|
мм |
|
|
|
мм |
||
|
ε2 |
|
aS3ϕ |
|
|
|
|
|
|
|
||
|
|
4 |
|
|
|
|
|
|
|
|
||
|
|
|
S3 |
|
|
|
|
|
|
|
|
|
|
ϕ3 |
|
3 |
|
|
|
|
|
|
|
|
|
aGS2 |
S2 |
GG3 |
ϕ2 |
|
|
|
|
R12 |
|
R23 ≡ R32 |
||
2 |
|
G |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
RG12n |
||
|
G2 |
C |
|
|
4 |
|
|
|
|
|
||
A |
ϕ |
1 |
1 |
|
|
|
|
G2 |
|
|
|
G3 |
|
|
a |
|
|
|
|
|
|
RGτ |
|||
|
|
|
|
|
|
|
Fи |
2 |
|
|
||
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
B |
M |
и3 |
μ |
l |
= 0,01 м |
|
|
Mи2 |
|
|
|
|
|
|
мм |
R43 |
||
|
|
|
3 S3 |
|
|
|
|
||||
|
|
|
G |
|
|
|
|||||
h1 |
S2 |
|
|
|
|
|
G |
||||
F |
G3 |
Fи3 |
|
|
|
||||||
|
G |
|
C |
|
|
|
Fи3 |
||||
2 |
|
и2 |
h2 |
|
|
|
|
|
|
||
G2 |
|
|
|
|
|
|
|
|
|||
R12τ |
|
|
|
|
|
|
R |
|
|
|
|
|
GA |
|
|
|
|
|
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rn |
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
б |
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4.5. Силовой анализ структурной группы 2-го класса 2-го вида
Моменты пар сил инерции Mи2 и Mи3 направляем противоположно
направлениям действия угловых ускорений ε2 и ε3 соответственно. Вектора сил инерций прикладываем к центрам масс звеньев – точкам S2 и S3 соответственно, при этом их направления действия являются противоположными
Теория механизмов и машин. Практикум |
-83- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
заданным направлениям действия ускорений центров масс этих же звеньев (рис. 4.5, а). В результате полученная картина будет являться расчетной схемой структурной группы звеньев (рис. 4.5, б).
3) Для определения реакций в шарнирах A и C отбросим звенья 1 и 4,
а их действия на оставшиеся звенья 2 и 3 заменим соответствующими реак- |
|||||||||||||||||||||
циями RG12 |
и RG43 . Для реакции R12 известна только точка ее приложения. Раз- |
||||||||||||||||||||
ложим неизвестную реакцию |
R |
|
шарнира A на составляющие: |
Rn |
, Rτ |
||||||||||||||||
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|
12 |
12 |
|||||
(рис. 4.5, б). Для реакции RG43 известна точка ее приложения и линия действия |
|||||||||||||||||||||
(перпендикулярно оси звена 4). |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Уравнение равновесия полученной системы имеет вид |
|
|
|||||||||||||||||||
|
|
RGn + RGτ |
+G + FG |
+GG |
+ FG |
+ RG |
= 0 . |
|
(4.5) |
||||||||||||
|
12 |
12 |
|
|
|
|
2 |
|
|
è 2 |
3 |
è 3 |
43 |
|
|
|
|||||
Уравнение равновесия (4.5) содержит три неизвестных RGn , |
Rτ |
, R , |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
12 |
43 |
следовательно, статическая неопределимость системы равна двум. |
|
|
|||||||||||||||||||
С целью раскрытия статической неопределимости найдем значение |
|||||||||||||||||||||
тангенциальной составляющей реакции Rτ . |
|
|
|
|
|||||||||||||||||
Звено 2: ∑m(Fi )B |
=0 , или |
|
|
12 |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
−Rτ |
l |
AB |
|
+ M |
+ F h +G h =0 , |
|
|
||||||||||||
|
12 |
|
|
|
|
|
|
|
|
|
|
и2 |
|
и2 |
1 |
2 2 |
|
|
|
||
где плечи моментов, м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
h1 = |
|
h1 |
|
μl |
=19 0,01 = 0,19 , |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
h2 = |
|
h2 |
|
μl |
=9 0,01 = 0,09 . |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||||
Величина тангенциальной составляющей реакции в шарнире А, H, |
|||||||||||||||||||||
Rτ |
= |
Fи2 h1 + Mи2 |
+G2 h2 |
= 200 0,19 + 45 + 41,2 0,09 =173,42 . |
|
||||||||||||||||
|
|
|
|||||||||||||||||||
12 |
|
lAB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,50 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В результате проведенных вычислений в уравнении равновесия (4.5) осталось только две неизвестные – R12n , R43 , следовательно, статическая не-
определимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм, вычислим по формуле
μF = Fxи3 = 38078 = 4,87 .
Переведем в масштабный коэффициент остальные силы, мм:
Rτ |
|
= |
R12τ |
= |
173,42 |
=35,61≈36 , |
|
|
|||||||
|
|
|
|||||
12 |
|
|
μ |
F |
|
4,87 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
Теория механизмов и машин. Практикум |
-84- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
|
|
G |
|
|
|
= |
G2 |
|
= |
41,2 |
=8,46 ≈8 , |
||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
2 |
|
|
|
|
|
μ |
F |
|
|
|
4,87 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Fи |
|
|
|
|
|
|
|
|||||
|
|
F |
|
= |
|
2 |
|
|
= |
|
200 |
|
= 41,07 ≈ 41, |
||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
и2 |
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
4,87 |
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
G |
|
|
= |
|
G3 |
|
|
= |
52,97 |
=10,88≈11. |
|||||||||||||
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
3 |
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
|
4,87 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По полученным величинам строим план сил в выбранном масштабном коэффициенте (рис. 4.5, в).
Значение нормальной составляющей реакции в шарнире А, H,
Rn |
= |
|
|
|
Rn |
|
μ |
F |
=56 4,87 = 272,72 . |
|||||
12 |
|
|
|
12 |
|
|
|
|
|
|||||
Значения полных реакций в шарнирах А и С, H, равны |
||||||||||||||
R43 = |
|
R43 |
|
|
|
μF =122 4,87 =594,14 , |
||||||||
|
|
|||||||||||||
R12 = |
|
R12 |
|
μF = 66 4,87 =321,42 . |
||||||||||
|
|
|||||||||||||
С целью определения реакции в шарнире В соединим на плане сил |
||||||||||||||
вершину вектора реакции R43 |
|
с началом вектора G3 . Замерив полученный |
||||||||||||
отрезок, определим величину реакции в шарнире В, H: |
||||||||||||||
R23 = R32 = |
|
R23 |
|
μF =38 4,87 =185,06 , |
||||||||||
|
|
|||||||||||||
где R23 − отрезок с плана сил (рис. 4.5, в).
Задача 4.9. Подвижные звенья 2 и 3 образуют со звеньями 1 и 4 структурную группу 2-го класса 3-го вида (рис. 4.6, а). Используя графоаналитический метод, найти реакции кинематических пар, если lAB = 0,29 м, lBC = 0,40 м,
lAS |
2 |
= 0,17 м, |
|
lCS |
= 0,27 |
|
м, Fи |
=180 Н, Fи =360 Н, |
Mи |
=42 Н м, Mи =78 Н м, |
|||
|
|
|
|
|
3 |
|
|
2 |
|
3 |
2 |
3 |
|
ϕ |
1 |
=107D , ϕ |
2 |
=180D, ϕ |
3 |
=330D , ϕ |
4 |
= 230D , m =5,83 кг, m =3,65 кг. |
|||||
|
|
|
|
|
|
2 |
|
3 |
|||||
Р е ш е н и е. 1) По заданным геометрическим параметрам построим кинематическую схему структурной группы звеньев (рис. 4.6, а). Приняв AB = 29 мм, определим масштабный коэффициент длин, м/мм:
μl = lABAB = 029,29 = 0,01.
Переводим остальные геометрические параметры в масштабный коэффициент длин, мм:
|
BC |
|
= |
lBC |
= |
0,40 |
|
= 40 , |
||||||||
|
|
|||||||||||||||
|
|
|
|
0,01 |
||||||||||||
|
|
|
|
|
|
|
μl |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
AS |
2 |
|
= |
|
lAS |
2 |
= |
0,17 |
|
=17 , |
|||||
|
|
|
||||||||||||||
|
|
|
μ |
l |
|
0,01 |
||||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Теория механизмов и машин. Практикум |
-85- |
|||||||||||||||

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
CS = lСS3 = 0,27 = 27 . 3 μl 0,01
2) Нанеся на кинематическую схему структурной группы звеньев заданные силовые факторы, составим расчетную схему (рис. 4.6, б).
Силы тяжести звеньев 2 и 3, H, вычислим по формуле
G2 = m2 q =5,83 9,81 =57,19, G3 = m3 q =3,65 9,81 =35,81.
|
|
|
ϕ1 |
|
|
|
|
|
|
|
|
μl |
= 0,01 |
м |
|
μF |
= 5,0 |
H |
|
|
A |
|
|
|
|
|
|
|
|
|
|
мм |
|
мм |
|
||||
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
ε2 |
|
|
|
|
|
|
|
|
|
|
|
RGn |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
2 |
|
ϕ3 |
|
|
|
|
|
|
|
4 |
|
|
|
43 |
|
τ |
||
|
|
|
|
|
|
aS2 ϕ4 |
|
|
|
|
|
|
|
R43 |
|||||
|
S2 |
|
|
|
|
|
ϕ2 |
|
|
|
RG43 |
|
|||||||
|
|
G |
B |
|
|
G |
S |
|
ε |
|
3 |
C |
|
R |
≡ R |
|
|
|
|
|
|
G2 |
G |
|
|
|
3 |
|
|
|
23 |
32 |
|
|
|
||||
|
|
|
aS |
3 |
|
G |
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
G |
|
Gn |
|
|
|
|
|
|
|
|
|
μl |
= 0,01 |
м |
|
FG |
|
Rn |
|
|
R12 |
|
|
|
|
|
|
|
|
|
и3 |
|
|
||||||
R12τ |
|
A |
Mи2 |
|
|
|
|
|
|
|
мм |
|
G |
|
12 |
|
|||
h1 |
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
S2 |
|
2 |
|
|
|
h3 |
|
|
|
|
R12 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
Fи2 |
|
|
|
S Fи3 |
|
|
RGn |
R43τ |
|
G3 |
F |
G R12τ |
|
|||||
|
|
G |
|
|
|
|
3 |
G |
|
|
|
43 |
|
|
|
G2 |
|
|
|
|
|
Bh |
|
|
|
|
|
C |
|
|
и2 |
|
|
|
|||||
|
h |
G2 |
|
G3 |
Mи |
3 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
2 |
|
|
|
4 |
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
б |
в |
Рис. 4.6. Силовой анализ структурной группы 2-го класса 3-го вида
Моменты пар сил инерции Mи2 и Mи3 направляем противоположно
направлениям действия угловых ускорений ε2 и ε3 соответственно. Вектора сил инерций прикладываем к центрам масс звеньев – точкам S2 и S3 соот-
ветственно, при этом их направления действия являются противоположными заданным направлениям действия ускорений центров масс этих же звеньев
Теория механизмов и машин. Практикум |
-86- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
(рис. 4.6, а). В результате полученная картина будет являться расчетной схемой структурной группы звеньев (рис. 4.6, б).
3) Для определения реакций в шарнирах A и C отбросим звенья 1 и 4, а их действияG Gна оставшиеся звенья 2 и 3 заменим соответствующими реак-
циями R12 и R43 . Для реакций R12 и R43 известны только точки их приложе-
ния. Разложим неизвестные реакции R12 |
и R43 |
шарниров A и C, соответст- |
||||||||||||||||||||||||||||||||||
венно, на составляющие Rn , |
Rτ |
|
и Rn |
, R |
τ (рис. 4.6, б). |
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
12 |
12 |
|
|
|
|
|
|
43 |
43 |
|
|
|
|
|
|||||||||||||||
|
Уравнение равновесия полученной системы имеют вид |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
RGn |
+ RGτ |
+ G + F |
|
|
+G + F |
+ Rτ + Rn = 0. |
|
(4.6) |
|||||||||||||||||||||||
|
|
|
|
|
12 |
12 |
|
|
2 |
|
|
|
|
|
|
|
и2 |
|
|
3 |
и3 |
|
43 |
43 |
|
|
||||||||||
|
Уравнение равновесия (4.6) |
|
|
содержит четыре неизвестных: Rn , |
Rτ , |
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
12 |
Rn |
, Rτ , следовательно, статическая неопределимость системы равна трем. |
|||||||||||||||||||||||||||||||||||
43 |
43 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С целью раскрытия статической неопределимости найдем значения |
|||||||||||||||||||||||||||||||||||
тангенциальных составляющих реакций Rτ и |
R |
τ . |
|
|
|
|||||||||||||||||||||||||||||||
|
Звено 2: |
∑m(Fi )B |
=0 , или |
|
|
|
|
|
12 |
43 |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
Rτ l |
AB |
− M |
è 2 |
|
+ F h +G h = 0 , |
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
è 2 |
1 |
2 |
2 |
|
|
|
|||
где плечи моментов, м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
h1 = |
|
|
|
h1 |
|
|
μl |
=8 0,01 =0,08 , |
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
h2 = |
|
h2 |
|
μl |
=3 0,01 =0,03 . |
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Величина тангенциальной составляющей реакции в шарнире А, H, |
|||||||||||||||||||||||||||||||||||
|
τ |
|
−Fè 2 |
h1 + Mè 2 |
−G2 h2 |
|
|
|
−180 |
0,08 + 42 − |
57,19 0,03 |
|
|
|||||||||||||||||||||||
|
R12 |
= |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
|
|
|
|
|
|
|
|
|
=89,26 . |
|
|
|
|
|
|
lAB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,29 |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
Звено 3: |
∑m(Fi )B =0 , или |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
F h + Rτ |
|
|
l |
BC |
− M |
−G h = 0 , |
|
|
||||||||||||||||||||||
|
|
|
|
|
|
è 3 |
|
3 |
43 |
|
|
|
|
è 3 |
3 |
4 |
|
|
|
|||||||||||||||||
где плечи моментов, м, |
h3 = |
|
h3 |
|
|
|
μl |
|
=11 0,01 = 0,11, |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
h4 = |
|
h4 |
|
|
μl |
|
=14 0,01 =0,14 . |
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
Величина тангенциальной составляющей реакции в шарнире C, H, |
|||||||||||||||||||||||||||||||||||
|
Rτ |
= |
− Fи3 |
h3 + Mи3 |
+G3 h4 |
|
= −360 0,11+78 +35,81 0,14 =108,53 . |
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
43 |
|
|
|
|
lBC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,40 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
В результате проведенных вычислений в уравнении равновесия (4.6) осталось только две неизвестные – R12n , R43n , которые являются нормальными составляющими реакций в шарнирах А и С, следовательно, статическая не-
Теория механизмов и машин. Практикум |
-87- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
определимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм,
μF = Fxи3 = 36072 =5,0 .
Переведем в масштабный коэффициент плана сил остальные силы,
мм:
Rτ |
|
|
|
|
= |
R43τ |
|
= |
108,53 = 21,71 ≈ 22, |
||||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
43 |
|
|
|
|
|
|
μF |
|
|
|
|
|
|
|
|
|
|
5,0 |
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
G |
2 |
|
|
|
= |
|
G2 |
|
|
= |
57,19 |
|
=11,44 ≈11, |
|||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
5,0 |
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
|
Fи |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
= |
|
2 |
|
= |
180 |
=36 , |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
и2 |
|
|
|
|
|
|
|
|
μ |
F |
|
|
5,0 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
G |
|
|
= |
|
|
= |
35,81 |
=7,16≈7 , |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
3 |
|
|
|
|
μ |
F |
|
|
|
|
|
|
|
5,0 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
Rτ |
|
|
= |
|
R12τ |
|
= |
89,26 |
|
=17,52 ≈17 . |
|||||||||||||||||||||||
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
12 |
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
|
|
|
|
|
5,0 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По полученным величинам строим план сил в выбранном масштабном коэффициенте (рис. 4.6, в).
Значения нормальных составляющих реакций, H, равны
|
|
|
|
Rn |
= |
|
Rn |
μ |
F |
=19 5,0 =95 , |
|
||||||||||||||
43 |
|
|
|
|
|
|
43 |
|
|
|
|
|
|
||||||||||||
|
|
|
|
Rn |
= |
|
|
|
|
|
Rn |
|
|
|
μ |
F |
= 75 5,0 =375. |
|
|||||||
|
|
|
|
||||||||||||||||||||||
12 |
|
|
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
Значения полных реакций в шарнирах А и С, H, равны |
|
||||||||||||||||||||||
|
|
|
|
R43 = |
|
R43 |
|
μF = 29 5,0 =145 , |
|
||||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
|
|
R12 = |
|
R12 |
|
|
μF =77 |
5,0 =385 . |
|
||||||||||||||
|
|
|
|||||||||||||||||||||||
|
|
С целью определения реакции в |
шарнире ВGсоединим |
на плане |
|||||||||||||||||||||
сил вершину вектора реакции R43 с началом вектора G3 . Замерив получен- |
|||||||||||||||||||||||||
ный отрезок, найдем значение реакции в шарнире В, H: |
|
||||||||||||||||||||||||
|
|
|
|
R23 = R32 = |
|
R23 |
|
μF = 75 5,0 =375 , |
|
||||||||||||||||
|
|
|
|||||||||||||||||||||||
где |
|
R23 |
|
− отрезок с плана сил (рис. 4.6, в). |
|
|
|||||||||||||||||||
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Теория механизмов и машин. Практикум |
-88- |
||||||||||||||||||||

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Задача 4.10. Для структурной группы звеньев 1, 2, 3 и 4 (рис. 4.4, а) найти реакции в шарнирах A, В и С, используя план сил. Данные взять из табл. 4.4.
Таблица 4.4
Вари- |
Направ- |
m2, |
m3, |
l |
|
, |
l |
|
, |
lAS |
|
, |
lBS , |
|
|
|
|
Fи |
, |
Fи |
, |
Ми |
, |
Ми |
, |
|
ление |
AB |
BC |
|
|
|
|
|
|||||||||||||||||||
ант |
кг |
кг |
|
|
|
|
|
2 |
|
3 |
φ1 |
φ2 |
φ3 |
φ4 |
2 |
|
3 |
2 |
3 |
|||||||
|
|
|
м |
|
|
м |
|
|
|
Н |
|
Н |
|
Н м |
Н м |
|||||||||||
ε1 |
ε2 |
|
|
|
|
м |
|
м |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
− |
+ |
3,0 |
4,6 |
0,6 |
|
0,8 |
|
0,3 |
|
0,3 |
30 |
40 |
100 |
30 |
30 |
|
40 |
|
25 |
|
29 |
|
|||
2 |
+ |
+ |
4,0 |
5,0 |
0,8 |
|
0,5 |
|
0,4 |
|
0,2 |
40 |
40 |
110 |
35 |
44 |
|
50 |
|
20 |
|
32 |
|
|||
3 |
− |
− |
3,2 |
4,8 |
1,0 |
|
0,8 |
|
0,6 |
|
0,3 |
35 |
35 |
130 |
40 |
48 |
|
52 |
|
30 |
|
36 |
|
|||
4 |
+ |
− |
3,8 |
5,6 |
1,2 |
|
1,5 |
|
0,7 |
|
0,6 |
50 |
20 |
100 |
35 |
36 |
|
44 |
|
28 |
|
33 |
|
|||
5 |
− |
+ |
5,0 |
3,2 |
1,5 |
|
0,8 |
|
0,5 |
|
0,3 |
60 |
25 |
110 |
50 |
28 |
|
42 |
|
32 |
|
40 |
|
|||
6 |
− |
− |
2,8 |
5,8 |
0,5 |
|
1,2 |
|
0,2 |
|
0,6 |
65 |
30 |
30 |
100 |
30 |
|
45 |
|
36 |
|
44 |
|
|||
7 |
+ |
+ |
3,6 |
5,2 |
0,8 |
|
1,3 |
|
0,4 |
|
0,6 |
70 |
40 |
40 |
110 |
35 |
|
40 |
|
40 |
|
50 |
|
|||
8 |
+ |
− |
6,0 |
6,0 |
1,0 |
|
1,5 |
|
0,6 |
|
0,7 |
33 |
45 |
120 |
100 |
50 |
|
64 |
|
33 |
|
41 |
|
|||
9 |
+ |
− |
5,8 |
5,8 |
1,2 |
|
1,8 |
|
0,6 |
|
0,8 |
60 |
35 |
35 |
35 |
60 |
|
30 |
|
24 |
|
26 |
|
|||
10 |
− |
+ |
3,6 |
3,6 |
1,4 |
|
0,7 |
|
0,8 |
|
0,3 |
50 |
50 |
110 |
110 |
40 |
|
50 |
|
35 |
|
30 |
|
|||
11 |
+ |
+ |
5,2 |
5,2 |
1,5 |
|
1,3 |
|
0,7 |
|
0,6 |
55 |
28 |
45 |
60 |
80 |
|
40 |
|
44 |
|
30 |
|
|||
12 |
+ |
+ |
3,0 |
3,0 |
0,7 |
|
0,9 |
|
0,3 |
|
0,5 |
80 |
30 |
130 |
90 |
50 |
|
30 |
|
20 |
|
46 |
|
|||
13 |
− |
− |
4,0 |
4,0 |
0,9 |
|
1,8 |
|
0,5 |
|
0,9 |
20 |
60 |
50 |
120 |
70 |
|
70 |
|
25 |
|
15 |
|
|||
14 |
− |
+ |
3,5 |
3,5 |
1,1 |
|
0,7 |
|
0,6 |
|
0,4 |
25 |
70 |
120 |
60 |
65 |
|
55 |
|
30 |
|
38 |
|
|||
15 |
+ |
− |
4,2 |
4,2 |
1,6 |
|
0,9 |
|
0,8 |
|
0,6 |
30 |
80 |
60 |
70 |
40 |
|
65 |
|
40 |
|
20 |
|
|||
16 |
+ |
+ |
2,5 |
2,5 |
1,0 |
|
1,0 |
|
0,5 |
|
0,4 |
80 |
20 |
40 |
90 |
20 |
|
28 |
|
10 |
|
16 |
|
|||
17 |
− |
− |
3,0 |
5,2 |
1,2 |
|
1,6 |
|
0,6 |
|
0,7 |
20 |
65 |
140 |
85 |
36 |
|
32 |
|
17 |
|
15 |
|
|||
18 |
+ |
− |
6,0 |
3,0 |
2,0 |
|
1,4 |
|
1,2 |
|
0,7 |
40 |
85 |
60 |
60 |
20 |
|
30 |
|
19 |
|
13 |
|
|||
19 |
− |
+ |
5,6 |
4,8 |
1,8 |
|
1,2 |
|
0,8 |
|
0,5 |
55 |
35 |
75 |
125 |
28 |
|
27 |
|
20 |
|
24 |
|
|||
20 |
− |
+ |
3,8 |
6,0 |
0,8 |
|
2,2 |
|
0,4 |
|
0,9 |
75 |
50 |
80 |
80 |
30 |
|
25 |
|
22 |
|
18 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Примечание. Знак «+» указывает на то, что угловая скорость звена действует по ходу часовой стрелки, знак «–» – на то, что в противоположном направлении.
Задача 4.11. Для структурной группы звеньев 1, 2, 3 и 4 (рис. 4.5, а), найти реакции в шарнирах A, В и С, используя план сил. Данные взять из табл. 4.5.
Теория механизмов и машин. Практикум |
-89- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Таблица 4.5
Вари- |
Направ- |
m2, |
m3, |
l |
AB |
, |
l |
BC |
, |
lAS |
, |
lBS |
3 |
, |
φ1 |
φ2 |
φ3 |
φ4 |
Fи |
, |
Fи |
, |
Ми2, |
Ми3, |
|
ант |
ление |
кг |
кг |
|
|
|
|
|
2 |
|
|
2 |
3 |
|
|
||||||||||
|
|
|
м |
|
|
м |
|
м |
м |
|
|
|
|
|
Н |
|
Н |
|
Н м |
Н м |
|||||
ε1 |
ε2 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
1 |
+ |
− |
3,2 |
4,8 |
1,0 |
|
0,8 |
|
0,6 |
0,3 |
|
35 |
35 |
130 |
40 |
44 |
|
50 |
|
20 |
32 |
||||
2 |
+ |
+ |
3,8 |
5,6 |
1,2 |
|
1,5 |
|
0,7 |
0,6 |
|
50 |
20 |
100 |
35 |
36 |
|
44 |
|
28 |
33 |
||||
3 |
− |
− |
3,6 |
5,2 |
0,8 |
|
1,3 |
|
0,4 |
0,6 |
|
70 |
40 |
40 |
110 |
20 |
|
28 |
|
10 |
16 |
||||
4 |
− |
+ |
2,8 |
5,8 |
0,5 |
|
1,2 |
|
0,2 |
0,6 |
|
65 |
30 |
30 |
100 |
35 |
|
40 |
|
40 |
50 |
||||
5 |
+ |
− |
5,0 |
3,2 |
1,5 |
|
0,8 |
|
0,5 |
0,3 |
|
60 |
25 |
110 |
50 |
50 |
|
64 |
|
33 |
41 |
||||
6 |
− |
− |
6,0 |
6,0 |
1,0 |
|
1,5 |
|
0,6 |
0,7 |
|
33 |
45 |
120 |
100 |
30 |
|
45 |
|
36 |
44 |
||||
7 |
+ |
+ |
5,2 |
5,2 |
1,5 |
|
1,3 |
|
0,7 |
0,6 |
|
55 |
28 |
45 |
60 |
28 |
|
42 |
|
32 |
40 |
||||
8 |
− |
+ |
3,6 |
3,6 |
1,4 |
|
0,7 |
|
0,8 |
0,3 |
|
50 |
50 |
110 |
110 |
50 |
|
30 |
|
20 |
46 |
||||
9 |
− |
+ |
5,8 |
5,8 |
1,2 |
|
1,8 |
|
0,6 |
0,8 |
|
60 |
35 |
35 |
35 |
48 |
|
52 |
|
30 |
36 |
||||
10 |
+ |
− |
3,0 |
3,0 |
0,7 |
|
0,9 |
|
0,3 |
0,5 |
|
80 |
30 |
130 |
90 |
40 |
|
50 |
|
35 |
30 |
||||
11 |
+ |
+ |
4,0 |
4,0 |
0,9 |
|
1,8 |
|
0,5 |
0,9 |
|
20 |
60 |
50 |
120 |
80 |
|
40 |
|
44 |
30 |
||||
12 |
+ |
+ |
3,5 |
3,5 |
1,1 |
|
0,7 |
|
0,6 |
0,4 |
|
25 |
70 |
120 |
60 |
60 |
|
30 |
|
24 |
26 |
||||
13 |
− |
− |
3,8 |
6,0 |
0,8 |
|
2,2 |
|
0,4 |
0,9 |
|
75 |
50 |
80 |
80 |
70 |
|
70 |
|
25 |
15 |
||||
14 |
+ |
− |
2,5 |
2,5 |
1,0 |
|
1,0 |
|
0,5 |
0,4 |
|
80 |
20 |
40 |
90 |
65 |
|
55 |
|
30 |
38 |
||||
15 |
− |
+ |
0,8 |
3,0 |
4,6 |
|
0,6 |
|
0,8 |
0,3 |
|
0,3 |
30 |
40 |
100 |
30 |
|
65 |
|
40 |
20 |
||||
16 |
+ |
+ |
5,6 |
4,8 |
1,8 |
|
1,2 |
|
0,8 |
0,5 |
|
55 |
35 |
75 |
125 |
28 |
|
27 |
|
20 |
24 |
||||
17 |
− |
− |
4,2 |
4,2 |
1,6 |
|
0,9 |
|
0,8 |
0,6 |
|
30 |
80 |
60 |
70 |
30 |
|
40 |
|
25 |
29 |
||||
18 |
− |
+ |
4,0 |
5,0 |
0,8 |
|
0,5 |
|
0,4 |
0,2 |
|
40 |
40 |
110 |
35 |
20 |
|
30 |
|
19 |
13 |
||||
19 |
+ |
− |
3,0 |
5,2 |
1,2 |
|
1,6 |
|
0,6 |
0,7 |
|
20 |
65 |
140 |
85 |
30 |
|
25 |
|
22 |
18 |
||||
20 |
+ |
− |
6,0 |
3,0 |
2,0 |
|
1,4 |
|
1,2 |
0,7 |
|
40 |
85 |
60 |
60 |
36 |
|
32 |
|
17 |
15 |
||||
Примечание. Знак «+» указывает на то, что угловая скорость звена действует по ходу часовой стрелки, знак «–» – на то, что в противоположном направлении.
Задача 4.12. Центры масс шатунов 2 и 4 механизма качающегося транспортера лежат посередине этих звеньев, а массы этих звеньев находятся в соотношении m4 =0,75 m2 . Определить силовое управляющее воздействие,
используя кинетостатический метод, если масса шатуна m2 =5,2 кг, криво-
шипа m1 =0,35 m2 , ползуна m5 =0,6 m4 , звеньев контура mBO1 =mCO1 =0,3 m2 и mBC =0,15 m2 . Данные для построения кинематической схемы взять из
задачи 3, задачи 4.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему механизма качающегося транспортера в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.7, а). По условию задачи известно,
что центры масс шатунов 2 и 4 лежат посередине этих звеньев, следовательно, используя теорему подобия, найдем положения точек S2 и S4 на кинема-
тической схеме механизма качающегося транспортера.
2)Для полученной кинематической схемы строим план ускорений
всоответствующем масштабном коэффициенте (рис. 4.7, б).
Теория механизмов и машин. Практикум |
-90- |
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Центр масс кривошипа 1 совпадает с центром вращения точкой О, следовательно, ускорение центра масс равно нулю, т. е. aS1 =0 . Используя
теорему подобия, определим положение точек s2 и s4 на плане ускорений (рис. 4.7, б). Соединив точки s2 и s4 с полюсом плана ускорений точкой π,
получим соответственно вектора ускорений центров масс шатунов 2 и 4, значения которых найдем по выражениям, м/с2,
aS2 = πs2 μa =50 2,028 =101,4 , aS4 = πs4 μa = 26 2,028 =52,73 .
Центр масс коромысла 3 (контур) лежит на пересечении медиан данной фигуры, т. е. в точке s3 . Замерив отрезок πs3 на плане ускорений (рис. 4.7, б), получим, м/с2,
aS3 = πs3 μa =34 2,028 = 68,95.
Центр масс ползуна 5 совпадает с точкой D, следовательно, ускорение центра масс ползуна равно ускорению точки D, м/с2:
aS5 = aD = πd μa = 6 2,028 =12,17 .
3) Определим все силовые факторы, действующие на звенья механизма, следующим образом.
Массы звеньев, H, равны
m1 = 0,35 m2 = 0,35 5,2 =1,82 ,
m3 = mBO1 + mCO1 + mBC =(0,3 + 0,3 + 0,15) m2 = 0,75 5,2 =3,9 , m4 = 0,75 m2 = 0,75 5,2 =3,9 ,
m5 = 0,6 m4 = 0,6 3,90 = 0,6 3,90 = 2,34 . Cилы тяжести звеньев механизма, H, составляет
G1 = m1 q =1,82 9,81 =17,85 , G2 = m2 q =5,2 9,81 =51,01,
G3 = m3 q =3,9 9,81 =38,26 , G4 = m4 q =3,9 9,81 =38,26 , G5 = m5 q = 2,34 9,81 = 22,96 .
Силы инерции звеньев механизма, H, равны
|
Fи = m1 |
aS =1,82 0 |
= 0 , |
|
1 |
1 |
|
Fи2 |
= m2 aS2 |
=5,2 101,4 =527,28 , |
|
Fи3 |
= m3 aS3 |
=3,9 68,95 = 268,91, |
|
Fи4 |
= m4 aS4 |
=3,90 52,73 |
= 205,65 , |
|
|
||
Теория механизмов и машин. Практикум |
-91- |
||

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Fи5 = m5 aS5 = 2,34 12,17 = 28,48 .
Вектора сил инерций прикладываем к центрам масс звеньев, так как их направления действия противоположны направлениям действия ускорений центров масс этих же звеньев (рис. 4.7, а).
Моменты инерции звеньев, кг м2 , равны
JS1 = 0,166 m1 lOA2 = 0,166 1,82 0,152 = 0,00679 ,
J |
S |
|
|
=0,083 m |
2 |
l2 |
|
=0,083 5,2 0,372 |
=0,05909 , |
||
|
2 |
|
|
|
AB |
|
|
||||
|
|
|
|
|
|
|
|
|
|
||
|
J |
S |
|
= 0,1 m |
4 |
l 2 |
= 0,083 3,9 0,262 = 0,02188. |
||||
|
|
|
4 |
|
|
CD |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
Момент инерции коромысла 3, кг м2 ,
|
|
|
n |
li2 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
∑(mi |
|
m |
l2 |
+ m |
l2 |
+ m |
l2 |
||||||
JS |
|
= |
i=1 |
|
= |
|
BO1 |
BO1 |
CO1 |
СO1 |
BC BC |
= |
||||
|
18 |
|
|
|
|
|
|
|
||||||||
|
3 |
|
|
|
|
|
|
|
|
18 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
1,56 0,22 |
+1,56 0,22 +0,78 |
0,082 |
= 0,00721, |
||||||||||
|
|
|
|
|
|
181 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где n – количество стержней, образующих коромысло (контур), кг;
mBO1 = 0,3 m2 = 0,3 5,2 =1,56 , mCO1 = 0,3 m2 = 0,3 5,2 =1,56 , mBC = 0,15 m2 = 0,15 5,2 = 0,78.
Угловые ускорения звеньев механизма, с-2, равны
|
|
|
|
|
|
|
|
|
|
|
|
|
aτ |
|
|
|
0 |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
ε = |
|
|
|
|
AO |
= |
|
|
|
|
|
= 0 , |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
1 |
|
lAO |
0,20 |
|
|
|
||||||||||||||||||
|
|
|
|
aBAτ |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
ε2 |
= |
|
= |
|
|
|
n1b |
|
μa |
|
= |
3 2,028 |
= |
16,43, |
||||||||||||||||
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
lAB |
|
|
|
|
|
|
|
|
|
|
|
0,37 |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
lAB |
|
|
|
|
|
|
|||||||||||||
ε3 = |
aBOτ 1 |
|
= |
|
|
n2b |
|
μa |
= |
25 2,028 = 253,5 , |
||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
||||||||||||||||||||||||||||
lBO |
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
lBO |
|
|
|
|
0,20 |
|
|
|||||||||||||||
|
1 |
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
ε4 |
= |
aDCτ |
|
= |
|
|
n5d |
|
μa |
= |
45 2,028 |
=351. |
||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
lCD |
|
|
0,26 |
|
|||||||||||||||||||||
|
|
|
|
lCD |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Угловое ускорение ползуна 5 равно нулю, т. е. ε5 = 0 , т. к. ползун 5
со стойкой 0 образует поступательную пару 5-го класса, следовательно, данное звено может совершать только поступательные прямолинейные движения. Для определения направлений действия угловых ускорений ε2 , ε3 и ε4
перенесем вектора тангенциальных ускорений aGBAτ , aGBOτ 1 и aGDCτ (рис. 4.7, б),
соответственно, в точки B и D на кинематической |
схеме механизма |
|
|
Теория механизмов и машин. Практикум |
-92- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
(рис. 4.7, a). При этом точки A и C считаем условно неподвижными. В этом случае полученные системы будут совершать вращательные движения, соответственно, вокруг неподвижных точек A, O1 и С. Данные направления движений и есть, соответственно, направления действия угловых ускорений этих звеньев, т. е. угловые ускорения ε2 и ε3 действуют по ходу часовой стрелки,
угловое ускорение ε4 имеет противоположное направление. Моменты пары сил инерции звеньев, H м, равны
Mи1 = JS1 ε1 =0,00679 0 = 0 ,
Mи2 = JS2 ε2 = 0,05909 16,43 = 0,97 ,
Mи3 = JS3 ε3 = 0,00721 253,5 =1,83 ,
Mи4 = JS4 ε4 = 0,02188 351,0 =7,68,
Mи5 = JS5 ε5 = JS5 0 =0 .
Направления действия моментов пар сил инерции Mè 2 , Mи3 и Mи4
противоположны направлениям действия соответствующих угловых ускорений ε2 , ε3 и ε4 , т. е. моменты пар сил инерции шатуна 2 и коромысла 3 дей-
ствуют противоположно ходу часовой стрелки (рис. 4.7, г), а момент пары сил инерции шатуна 4 действует по ходу часовой стрелки (рис. 4.7, в).
4) С целью определения реакций в кинематических парах разделим кинематическую схему механизма на структурные группы звеньев.
Структурная группа звеньев 5 – 4 показана на рис. 4.7,Gв. Действующими силовыми факторами являются: силы тяжести звеньев G4 и G5 , силы
инерции FGи4 и Fи5 , момент пары сил инерции Mи4 , реакции RG34 и RG05 , харак-
теризующие действия звеньев 3 и 0. Для реакции R05 известны точка ее приложения и линия действия (перпендикулярно к прямой ОD).GДля реакции R34 известна только точка ее приложения. Разложим реакцию R34 на составляю-
щие Rn |
и Rτ . |
|
|
|
|
|
|
|
34 |
34 |
|
|
|
|
|
|
|
Уравнение равновесия полученной системы имеет вид |
|
|||||||
|
RGn |
+ RGτ |
+G + FG |
+GG |
+ FG |
+ RG |
= 0 . |
(4.9) |
|
34 |
34 |
4 è 4 |
5 |
è 5 |
05 |
|
|
G
Уравнение равновесия (4.9) содержит три неизвестных: R34n , R34τ и R05 ,
следовательно, статическая неопределимость системы равна двум.
С целью раскрытия статической неопределимости найдем значение тангенциальной составляющей реакции R34τ .
Звено 4: ∑m(Fi )D =0 , или
R34τ lCD − Mè 4 − Fè 4 h1 +G4 h2 = 0 ,
Теория механизмов и машин. Практикум |
-93- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
где плечи моментов, м,
h1 = h1 μl =13 0,01 = 0,13, h2 = h2 μl =11 0,01 = 0,11.
Значение тангенциальной составляющей реакции в шарнире C, H,
Rτ |
|
= |
Fè 4 h1 + Mè 4 −G4 h2 |
= 205,65 0,13 +7,68 −38,26 0,11 =116,18 . |
|
|
|
||||
34 |
|
lCD |
|
0,26 |
|
|
|
|
|
||
|
В результате проведенных вычислений в уравнении равновесия (4.9) |
||||
осталось только две неизвестные – Rn |
и R , следовательно, статическая не- |
||||
|
|
|
|
34 |
05 |
определимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм, найдем по формуле
μF = Fxи4 = 20555,65 =3,74 .
Переведем в масштабный коэффициент остальные силы, мм:
R34τ = R34τ =116,16 =31,06 ≈31, μF 3,74
|
G |
4 |
|
|
= |
G4 |
= 38,26 |
=10,23≈10 , |
||||||||||||||
|
|
|
||||||||||||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
μF |
|
|
|
|
|
3,74 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
F |
|
|
= |
|
Fи |
5 |
|
= |
28,48 |
= 7,61≈8 , |
||||||||||
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
и5 |
|
|
|
|
|
μ |
F |
|
3,74 |
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
G |
|
= |
G5 |
|
= |
22,96 |
|
=6,14≈6 . |
||||||||||||
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
5 |
|
|
|
|
μ |
F |
|
3,74 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
По полученным величинам строим план сил (рис. 4.7, г). Значение нормальной составляющей реакции в шарнире С, H,
Rn |
= |
Rn |
μ |
F |
=11 3,74 = 41,14 . |
34 |
|
34 |
|
|
Значения полных реакций в шарнирах С и D, H, равны
R34 = R34 μF =33 3,74 =123,42 ,
R05 = R05 μF =16 3,74 =59,84 .
Теория механизмов и машин. Практикум |
-94- |

|
|
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ |
|
|
|||||||||||||||||||||||||||
|
2 |
S |
2 |
|
ε2 |
|
B |
aGBOτ |
4 |
|
μl = 0,01 м |
|
μа |
= 2,028 |
м/c2 |
d |
aGD π |
|
|
|
|||||||||||
|
|
|
|
|
|
εS3 |
|
|
1 |
|
|
|
мм |
|
|
|
мм |
|
|
|
|
|
|
|
|||||||
А |
|
|
|
|
|
|
aGСBAτ |
|
S |
|
ε4 |
aGDCτ |
|
|
|
|
aGDCτ |
|
|
|
|
|
|
|
|
||||||
O 1 aGS2 |
|
33 |
|
|
|
4 D 5 |
|
|
aGn |
|
|
|
|
G |
|
|
|
||||||||||||||
|
|
|
0 |
О1 |
|
G |
|
|
a |
|
|
|
|
|
|
|
|
Gn |
|
s4 |
|
aS4 |
|
|
|
||||||
|
|
|
|
|
|
aS |
|
|
S4 |
|
|
|
|
|
CO1 |
|
|
|
|
|
aS |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
n4 |
|
aBO |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
|
|
Gτ |
|
1G |
|
|
s3 |
|
|
2 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aCO |
|
aC |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
|
1 |
|
|
|
|
|
Gn |
|
aA |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
n |
2 |
|
|
|
|
|
||||
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
H |
|
G |
5 |
Gn |
|
|
|
|
|
aCB n1aB |
|
а |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
μl =0,01 |
мм |
|
|
|
|
μF =3,74 |
мм |
|
5 Fи5 |
|
aDC |
|
с Gτn3 |
aGBOτ |
b |
s2aGBAn |
|||||||||||||||
G |
n |
С |
|
FG |
|
|
h1 |
|
|
|
|
|
R45 ≡R54 |
|
R05 |
|
|
|
|
aCB |
1 |
aGBAτ |
|
||||||||
|
|
|
|
и4 |
|
|
|
|
|
|
|
|
|
|
|
Rn |
|
|
|
|
|
|
б |
|
|
|
|
|
|
||
R34 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
G |
|
4 S4 |
|
|
|
|
|
|
G |
|
|
|
|
|
|
34 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
R34τ |
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
Mи4 |
|
G4 |
G |
|
Fи5 |
|
|
|
|
R34τ |
R34 |
μF |
=10,14 |
H |
|
|
RGτ |
|
|
||||||||||
|
|
|
|
|
|
G5 D |
|
|
|
|
|
G4 |
F |
|
|
|
|
|
03 |
|
|
||||||||||
|
|
|
|
|
|
|
h2 |
R05 |
|
|
|
|
|
|
|
|
|
|
|
|
|
мм |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
и4 |
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|
Rn |
|
|
|
Fи |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
03 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
R03 |
|
|
|
|
|
3 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
G3 |
|
||||||
μl |
=0,01 |
|
м |
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
RG43 |
|
|
||||
|
|
|
G |
|
|
h |
|
|
|
|
Fи3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
мм |
|
|
|
|
3 |
|
|
|
|
h6 |
|
|
|
|
|
|
|
|
|
GR23 ≡R32 |
|||||||
|
|
|
|
|
|
|
|
Mи2 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
Fи2 |
|
B |
|
|
|
|
|
|
|
G |
|
|||||||||||
|
|
RGn |
|
|
А |
S |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Rn |
Fи2 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
R43 |
|
|
|
|
|
|
|
12 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
12 |
|
|
|
|
|
G2 |
|
3 |
|
С |
|
|
|
|
|
|
|
|
|
|
|
τ |
|
|||||
|
|
|
|
|
|
|
τ |
|
|
|
|
|
|
|
|
|
RG12 |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
R12 |
2 |
|
RGτ |
|
|
S3 Mи3 |
|
|
|
|
|
|
|
|
R12 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
03 O |
1 |
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 h5 |
|
|
|
|
|
|
|
|
|
|
|
|
G2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Rn |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
д |
|
|
|
|
03 |
|
|
|
|
|
|
|
|
|
|
|
е |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
м |
|
RG21 |
|
|
|
|
|
|
|
G1 |
|
|
|
|
|
|
|
|
|
|
H |
|
|
|
||
μl |
=0,01 |
|
|
|
|
FУ |
|
|
Rτ |
|
|
μF = 6,06 |
|
|
|
|
|||||||||||||||
|
|
|
|
мм |
|
А |
|
|
|
|
|
|
01 |
|
|
|
|
|
|
|
|
мм |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
R01 |
|
|
|
|
|
RG21 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
O |
|
RGn |
Rτ |
|
|
|
|
Rn |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
G |
|
|
01 |
|
|
|
|
|
01 |
|
|
|
|
|
G |
|
|
|
|
|
||
|
|
|
|
|
|
|
h7 |
G1 |
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
У |
|
|
|
||
|
|
|
|
|
|
|
|
|
ж |
|
|
|
|
|
|
|
|
|
з |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 4.7. Силовой анализ механизма |
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
качающегося транспортера |
|
|
|
|
|
|
|
|
|
|
|
||||||||
Теория механизмов и машин. Практикум |
-95- |

4.СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Сцелью определения реакции в шарнире D соединим на плане сил вершину вектора FGи4 с вершиной вектора R05 . Замерив полученный отрезок,
определим значение реакции в шарнире В, H:
R45 = R54 = R45 μF = 24 3,74 =89,76 ,
где R45 − отрезок с плана сил (рис. 4.7, г).
Структурная группа звеньев 3 – 2 показана на рис. 4.7,Gд. Действующими силовыми факторами являются: силы тяжести звеньев G2 и G3 , силы инерции FGи2 и FGи3 , моменты пар сил инерции Mи2 и Mи3 , реакция R43 в
шарнире С ( R43 = R34 =123,42 Н), реакции R12 и R03 , характеризующие дей-
ствия звеньев 1 и 4. Для реакций R12 и R03 |
известны только точки приложе- |
||||||||||||||||||||||||||
ния. Разложим реакции RG |
|
и |
|
|
R |
|
на составляющие Rn |
, RGτ |
и RGn , |
Rτ . |
|
||||||||||||||||
|
|
|
|
12 |
|
03 |
|
|
|
|
|
|
|
12 |
12 |
03 |
03 |
|
|||||||||
|
Уравнение равновесия полученной системы имеет вид |
|
|
||||||||||||||||||||||||
|
|
Rn |
+ RGτ +G + FG |
|
+ RG |
+GG |
+ FG |
+ RGτ |
+ RGn |
= 0 . |
(4.10) |
||||||||||||||||
|
12 |
12 |
|
|
2 |
è |
2 |
43 |
|
3 |
è |
3 |
03 |
03 |
|
|
|
||||||||||
|
Уравнение равновесия (4.10) содержит четыре неизвестных: Rn , |
Rτ |
|||||||||||||||||||||||||
и RGn |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
34 |
34 |
, RGτ , следовательно, статическая неопределимость системы равна трем. |
|||||||||||||||||||||||||||
03 |
03 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С целью раскрытия статической неопределимости найдем значения |
||||||||||||||||||||||||||
тангенциальных составляющих реакций |
Rτ |
и R |
τ . |
|
|
|
|
|
|||||||||||||||||||
|
Звено 2: ∑m(Fi )B =0 , или |
|
|
|
34 |
03 |
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
Rτ |
l |
AB |
+ M |
− F h +G h = 0 , |
|
|
|
|||||||||||||||||
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
è 2 |
è |
2 |
3 |
2 |
4 |
|
|
|
|
|
|
где плечи моментов, м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
h3 = |
|
|
|
h3 |
|
|
|
μl |
=18 0,01 = 0,18 , |
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
h4 = |
|
h4 |
|
μl |
=18 0,01 = 0,18 . |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
Значение тангенциальной составляющей реакции в шарнире A, H, |
|
|||||||||||||||||||||||||
Rτ = |
Fè 2 h3 − Mè 2 −G2 h4 |
= 527,28 0,18 −0,97 +51,01 0,18 = 278,71. |
|
||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||
|
12 |
|
lAB |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,37 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Звено 3: ∑m(Fi )B =0 , или
−R03τ lBО1 + Mи3 + Fи3 h5 + R43 h6 =0 ,
Теория механизмов и машин. Практикум |
-96- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
где mB (G3 ) =0 , т. к. линия действия вектора G3 проходит через точку B, плечи моментов, м,
|
|
|
h5 = |
|
h5 |
|
μl |
=1 0,01 = 0,01, |
||||||
|
|
|
|
|||||||||||
|
|
|
h6 = |
|
h6 |
|
μl |
=8 0,01 = 0,08 . |
||||||
|
|
|
|
|||||||||||
|
Значение тангенциальной составляющей реакции в шарнире О1 , H, |
|||||||||||||
Rτ |
|
= |
Fи3 h5 + Mи3 + R43 h6 |
= 268,91 0,01+1,83 +123,42 0,08 = 71,96 . |
||||||||||
|
|
|||||||||||||
03 |
|
lBO |
|
0,20 |
||||||||||
|
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
В результате проведенных вычислений в уравнении равновесия (4.10) |
|||||||||||||
осталось только две неизвестные – Rn |
и Rn , следовательно, статическая не- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
03 |
определимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм, вычислим по формуле
|
|
|
|
|
|
|
|
μ |
|
|
|
|
|
= |
Fи |
2 |
|
|
= |
|
527,28 |
=10,14 . |
|||||||||||||||
|
|
|
|
|
|
|
|
|
F |
|
|
|
x |
|
|
|
52 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Переведем в масштабный коэффициент остальные силы, мм: |
|||||||||||||||||||||||||||||||||||||
|
|
|
|
|
Rτ |
|
|
= |
|
R12τ |
|
= |
278,71 |
|
|
= 27,49 ≈ 27 , |
|||||||||||||||||||||
|
|
|
|
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
12 |
|
|
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
10,14 |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
G |
2 |
|
|
|
= |
G2 |
|
= |
|
51,01 |
|
=5,03≈5 , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,14 |
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Fи |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
F |
|
|
|
= |
|
3 |
|
|
= |
268,91 |
|
= 26,52≈ 26 , |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
и3 |
|
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
10,14 |
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
G |
|
|
|
|
= |
G3 |
|
= |
38,26 |
|
|
=3,77 ≈ 4 , |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
|
10,14 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
R |
τ |
|
|
|
|
= |
R03τ |
= |
71,96 |
=7,09≈ 7 , |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
03 |
|
|
|
|
|
|
μ |
F |
|
|
|
|
10,14 |
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
R |
|
= |
|
|
R43 |
|
|
= |
123,42 |
|
=12,17 ≈12 . |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
43 |
|
|
|
|
|
|
|
|
μ |
F |
|
|
|
|
|
10,14 |
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
По полученным величинам строим план сил в выбранном масштабном |
|||||||||||||||||||||||||||||||||||||
коэффициенте (рис. 4.7, e).
Значения нормальных составляющих реакций, H, равны
Rn |
= |
|
Rn |
μ |
F |
=58 10,14 =588,12 , |
|||
03 |
|
|
03 |
|
|
|
|
|
|
Rn |
= |
|
Rn |
|
|
μ |
F |
= 25 10,14 = 253,50 . |
|
|
|
||||||||
12 |
|
|
12 |
|
|
|
|
||
Теория механизмов и машин. Практикум |
-97- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Значения полных реакций в шарнирах А и О1 , H, равны
R03 |
= |
|
R03 |
μF =58 10,14 =588,12 , |
||
R12 |
= |
|
R12 |
|
|
μF =37 10,14 =375,18 . |
|
|
|||||
С целью определенияG реакции в шарнире В соединим на плане сил вершину вектора Fи2 с вершиной вектора R03n . Замерив полученный отре-
зок, определим величину реакции в шарнире В, мм:
R23 = R32 = R23 μF = 27 10,14 = 273,78,
где R23 − отрезок с плана сил (рис. 4.7, е).
|
|
|
Структурная группа звеньев 1 – 0 показана на рис. 4.7, ж. GДействую- |
|||||||||||||||||||||
щими силовыми факторами являются: сила тяжести кривошипа G1 , реакция |
||||||||||||||||||||||||
RG21 |
в шарнире А ( R21 = |
|
R12 |
|
=375,18 Н), реакция R01 , характеризующая дей- |
|||||||||||||||||||
|
|
|||||||||||||||||||||||
ствия стойки 0. Для реакции R01 |
известна только точка приложения. Разло- |
|||||||||||||||||||||||
жим реакцию RG |
|
на составляющие Rn |
и Rτ . |
|
|
|||||||||||||||||||
|
|
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
|
01 |
|
|
|
||
|
|
|
Уравнение равновесия полученной системы принимает вид |
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
FG |
|
+ RG |
|
|
|
+G + RGτ |
+ RGn =0 . |
(4.11) |
|||||||
|
|
|
|
|
|
|
|
|
У |
21 |
1 |
01 |
01 |
|
|
|||||||||
|
|
|
Уравнение равновесия (4.11) содержит три неизвестных: Rn , |
Rτ |
и |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
01 |
01 |
|
|
FGУ , следовательно, статическая неопределимость системы равна двум. |
|
|
||||||||||||||||||||||
|
|
|
С целью раскрытия статической неопределимости найдем значение |
|||||||||||||||||||||
тангенциальной составляющей реакции Rτ . |
|
|
||||||||||||||||||||||
|
|
|
Звено 1: ∑m(Fi ) А = 0, или |
01 |
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
Rτ |
l −G h =0 , |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
01 |
|
|
ОА |
1 |
7 |
|
|
|
|||||
где m |
B |
(F ) = 0 , |
m |
B |
(R ) = 0 , m |
B |
(Rn ) = 0 т. к. линии действия векторов F , |
|||||||||||||||||
RG |
|
У |
|
|
21 |
|
|
|
|
|
|
|
01 |
|
|
|
|
У |
||||||
, RGn проходят через точку А, а плечо момента, м, равно |
|
|
||||||||||||||||||||||
21 |
|
01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h7 = |
|
h7 |
|
|
μl =5 0,01 = 0,05. |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
Величина тангенциальной составляющей реакции в шарнире О, H, |
|
||||||||||||||||||||
|
|
|
|
|
|
|
Rτ = |
G1 h7 |
= |
17,85 0,05 |
= 4,46 H . |
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
01 |
|
|
lОА |
|
|
|
0,20 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
Теория механизмов и машин. Практикум |
-98- |

4.СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Врезультате проведенных вычислений в уравнении равновесия (4.11) осталось только две неизвестные – R01n и FУ , следовательно, статическая не-
определимость системы равна единице. Определение оставшихся неизвестных выполним с помощью плана сил.
Масштабный коэффициент плана сил, H/мм, вычислим по формуле
μF = Rx21 = 37560,18 = 6,25 .
Переведем в масштабный коэффициент остальные силы, мм:
|
|
G |
|
|
= |
G1 |
|
= |
17,85 |
|
= 2,86≈3 , |
||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
|
|
|
μ |
F |
|
|
|
6,25 |
|
|
|||
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
Rτ |
|
= |
|
R01τ |
= |
4,46 |
=0,72 ≈1 . |
||||||||
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|||||||||||
|
01 |
|
|
|
μ |
F |
|
|
|
6,25 |
|
||||||
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
По полученным величинам строим план сил в выбранном масштабном коэффициенте (рис. 4.7, з).
Значение нормальной составляющей реакции, H, равно
Rn |
= |
|
Rn |
|
μ |
F |
= 47 6,25 = 293,75 , |
01 |
|
|
01 |
|
|
|
|
R01 = |
|
R01 |
|
μF |
= 47 6,25 = 293,75 . |
||
|
|
||||||
Уравновешивающая сила, H,
FУ = FУ μF =33 6,25 = 206,25 .
Уравновешивающий момент, H м,
MУ = FУ lОА = 206,25 0,20 = 41,25 .
В ы в о д. Силовое управляющее воздействие равно 41,25 H м.
Задача 4.13. Для кривошипно-ползунного механизма определить силовое управляющее воздействие, используя теорему Жуковского, если массы звеньев находятся в соотношении m1 =0,45 m2 , m3 = 0,6 m2 . Данные для по-
строения кинематической схемы механизма и планов скоростей и ускорений взять из задачи 3.1, а для составления расчетной схемы – из задачи 4.1.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему кривошипно-ползунного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.8, а).
2) Для полученной кинематической схемы исходя из условия задачи 3.1 строим план скоростей в соответствующем масштабном коэффициенте (рис. 4.8, б).
Теория механизмов и машин. Практикум |
-99- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
3) Исходя из условия задачи 4.1 составляем расчетную схему (рис. 4.8, а) для кривошипно-ползунного механизма. При этом на звенья механизма действуют следующие силовые факторы:
а) силы инерции шатуна 2 и ползуна 3, H:
Fи2 = m2 aS2 =3,4 2424 =8241,6 ,
Fи3 = 0,6 m2 aS3 = 0,6 3,4 2736 =5581,44 .
б) силы тяжести звеньев механизма, H:
G1 = m1 q = 0,45 m2 q =0,45 3,4 9,81 =15,01, G2 = m2 q =3,4 9,81 =33,35 ,
G3 = m3 q = 0,6 m2 q = 0,6 3,4 9,81 = 20,01.
в) момент пары сил инерции шатуна 2, H м:
M и |
= JS |
ε2 = 0,033 2894,12 =95,51. |
||||||||
|
2 |
|
2 |
|
|
|
|
|
|
|
Заменяем момент пары сил инерции шатуна2 парой сил, H, и получаем |
||||||||||
F |
= F ' |
= |
M |
и |
2 |
= |
95,51 |
= 280,91. |
||
|
|
|
|
|||||||
|
M |
|
M |
|
lAB |
0,34 |
|
|||
|
|
|
|
|
|
|||||
4) В масштабном коэффициенте скоростей строим повернутый на 90˚ план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 4.8, в). Следуя теореме Жуковского, переносим в одноименные точки повернутого плана с кинематической схемы кривошипно-ползунного меха-
низма (рис. 4.8, а) вектора сил G1 , G2 , G3 , Fи2 , Fи3 , FM и FGM' , действующих на звенья механизма (рис. 4.8, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей:
∑m(Fi ) p =0 G2 h1 + Fи2 h2 − FM' h3 − FM h4 + Fи3 pb − FУ pa =0 ,
где mp (G1 ) =0, mp (G3 ) =0 , т. к. линии действия векторов GG1 и GG3 проходят через полюс плана скоростей точку р, а плечи моментов h1 =19 мм, h2 =29 мм,
h3 =23 мм, h4 =19 мм, pb =46 мм, pа =48 мм.
Следовательно, уравновешивающая сила, H,
Теория механизмов и машин. Практикум |
-100- |
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
G h |
|
+ F h − F |
' |
|
h − F h + F |
|
pb |
|
|
||||||
|
|
|
|
|
||||||||||||
FУ = |
2 |
1 |
и2 |
2 |
M |
3 |
M |
4 |
и3 |
|
|
|
= |
|||
|
|
|||||||||||||||
|
|
|
|
|
|
|
pa |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= 33,35 19 +8241,6 29 −280,91 23 |
−280,91 19 +5581,44 46 =10095,58. |
|||||||||||||||
|
|
|
|
48 |
|
|
|
|
|
|
|
|
|
|
|
|
Уравновешивающий момент, H м,
|
|
M У = FУ lOA =10095,58 0,20 = 2019,12 . |
|
|||||||
|
1 |
A |
FM' |
|
S2 |
Fи2 |
μl |
= 0,01 |
м |
|
|
|
2 |
|
|
|
мм |
|
|||
S |
, O |
|
|
|
B S3 |
Fи3 |
|
|
|
|
|
|
|
|
|
|
|
||||
1 |
|
|
GG |
|
|
|
|
|
|
|
|
0 |
|
2 |
3 |
0 |
|
|
h3 |
|
|
|
GG1 |
|
|
|
Ми2 FM G3 |
|
|
о, s1, p |
h4 |
|
|
|
G |
|
G |
a |
м/c |
|
|
|
|
|
|
|
|
|
G1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
о, s1, p |
|
|
μV = 0,5 |
' |
|
|
|
h2 |
|
|
|
|
||||||
|
|
мм |
|
|
|
|
|
|
|
|||||||||
VВ |
≡VS3 |
|
b, s3 |
FM |
|
|
|
|
|
FGи |
|
|
|
|
||||
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
VS |
2 |
VBA |
|
У a |
|
|
|
|
|
|
2 |
|
|
||
|
|
|
|
|
s2 |
|
|
|
|
|
|
|
|
|
Fи3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
G |
|
|
|
s2 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
G2 |
|
|
|
|
|
|
|
|
|
||||
VA ≡VAО |
|
|
|
|
|
|
|
|
|
F |
|
|
b, s |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
3 |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 |
|
|
G |
||
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
в |
|
|
|
||||||||
|
|
|
б |
|
|
|
|
|
|
|
|
|
||||||
Рис. 4.8. Силовой анализ кривошипно-ползунного механизма
В ы в о д. Силовое управляющее воздействие равно 2019,12 H м.
Задача 4.14. Для шарнирного механизма определить силовое управляющее воздействие, используя теорему Жуковского, если массы звеньев находятся в соотношении m1 =0,45 m2 , m3 = 0,6 m2 . Данные для построения
кинематической механизма схемы и планов скоростей и ускорений взять из задачи 3.2, а для составления расчетной схемы – из задачи 4.2.
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему шарнирного механизма в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.9, а).
Теория механизмов и машин. Практикум |
-101- |

4.СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
2)Для полученной кинематической схемы исходя из условия задачи 3.2 строим план скоростей в соответствующем масштабном коэффициенте (рис. 4.9, б).
3) Исходя из условия задачи 4.2 составляем расчетную схему (рис. 4.9, а) для шарнирного механизма. При этом на звенья механизма действуют следующие силовые факторы.
а) силы инерции шатуна 2 и коромысла 3, H,
Fи2 = m2 aS2 = 4,5 705,0 =3172,5 ,
Fи3 = 0,6 m2 aS3 = 0,6 4,5 390,0 =1053 .
б) силы тяжести звеньев механизма, H,
G1 = m1 q = 0,45 m2 q =0,45 4,5 9,81 =19,86 ,
G2 = m2 q = 4,5 9,81 = 44,15 ,
G3 = m3 q = 0,6 m2 q =0,6 4,5 9,81 = 26,49 .
в) моменты пары сил инерции шатуна 2 и коромысла 3, H м,
Mи2 = JS2 ε2 = 0,059 1387,5 =81,86 ,
Mи3 = JS3 ε3 = 0,04 2142,86 =85,71.
Заменяем моменты пары сил инерции шатуна 2 и коромысла 3 эквивалентными парами сил, H и получаем
F |
= F ' |
|
= |
|
M |
и |
2 |
|
= |
81,86 |
= 204,65 , |
|
2 |
|
|
|
|
|
|
|
|||||
M2 |
M |
|
|
lAB |
|
0,4 |
|
|||||
|
|
|
|
|
|
|
||||||
F |
= F ' |
|
= |
|
M |
и |
3 |
|
= |
85,71 |
= 244,88 . |
|
|
|
|
|
|
|
|
|
|||||
M3 |
M |
3 |
|
|
lBO |
|
|
|
0,35 |
|
||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
Теория механизмов и машин. Практикум |
-102- |
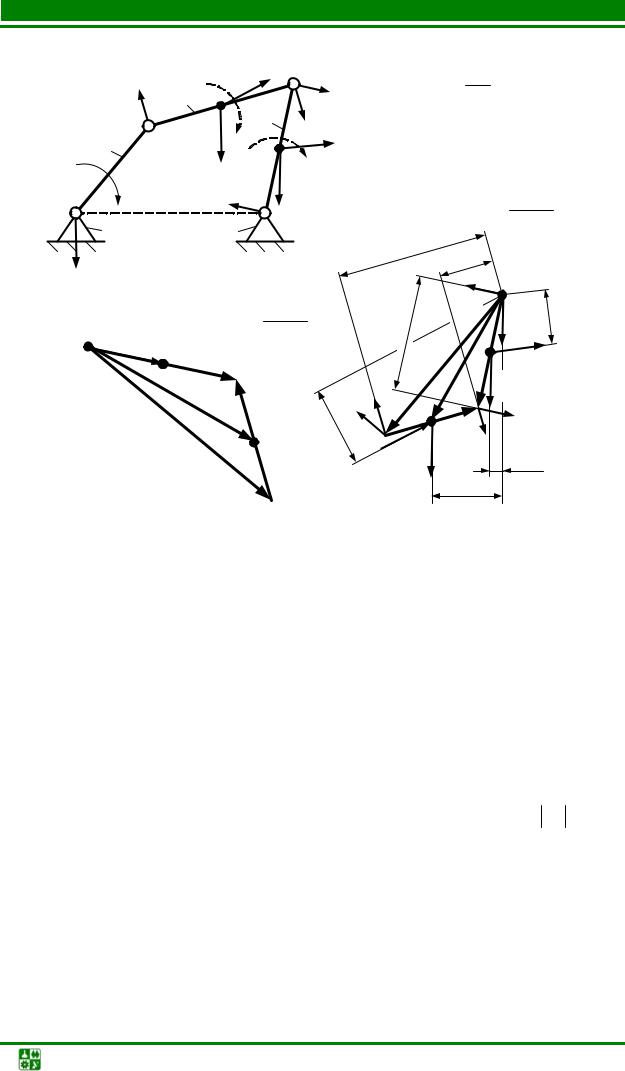
4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
|
|
G |
|
|
|
2 |
Ми2 |
Fи2 |
|
|
B |
' |
FM |
3 |
μ |
l |
= 0,01 |
м |
|
|
|
|
||||||
|
|
FM 2 |
|
|
|
S2 |
|
|
|
|
|
|
|
|
|
|
|
|
мм |
|
|
|
|
|||||
|
|
A |
|
|
|
|
|
|
|
|
3 |
|
FM 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
G2 |
|
|
|
|
|
F |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
1 |
|
|
|
|
|
|
S3 |
|
М |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
F |
' |
|
и |
3 |
и3 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
S1, O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|||||
|
|
|
|
|
|
M3 |
|
|
|
|
|
|
|
|
|
|
μ = 0,33 |
|
|
|||||||||
|
|
0 |
|
|
|
|
|
0 |
|
|
O1 |
|
|
|
|
|
|
|
|
c |
мм |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
GG1 |
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
h6 |
|
|
|
|
h5 |
|
|
|
p, о, о , s |
|||
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
FG' |
|
|
G |
|
1 1 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
||||
s |
, о, о , p |
|
|
|
|
μV = 0,24 |
|
|
|
|
|
|
|
|
|
|
M3 |
|
|
G1 |
h4 |
|||||||
|
|
s |
|
с мм |
|
|
|
|
7 |
|
|
|
|
|
|
|
||||||||||||
1 |
1 |
VS |
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
3 |
|
3 |
VВ |
b |
|
|
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
|
Fи3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3 |
G |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
F |
|
|
|
|
|
|
b |
|
G3 |
|
|
||
|
|
|
|
|
|
|
|
VS2 |
|
|
|
|
h2 |
M 2 |
|
|
|
|
|
|
|
|
|
G |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
s2 |
G' |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
s |
|
|
|
F |
|
|
|
|
|
|
FM3 |
|
|||||
|
|
|
G |
|
|
G |
|
|
2 |
|
|
|
У a |
|
|
Fи |
|
G2 |
FM |
2 |
|
h3 |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
V |
АО |
≡V |
A |
|
|
V |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
BA |
|
|
|
|
|
|
|
|
h1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
|
|
|
|
|
г |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Рис. 4.9. Силовой анализ шарнирного механизма
4) В масштабном коэффициенте скоростей строим повернутый на 90˚ план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 4.9, в). Следуя теореме Жуковского, переносим в одноименные точки
повернутого плана с кинематической |
схемы |
шарнирного механизма |
||||||||||||
(рис. 4.9, а) вектора сил GG |
, |
G |
2 |
, G |
4 |
, |
F , |
F |
, F |
, F ' |
, |
FG |
и FG ' |
, дейст- |
1 |
|
|
|
|
и2 |
и4 |
M2 |
M |
2 |
M4 |
M |
4 |
||
вующие на звенья механизма (рис. 4.9, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей:
∑m(Fi ) p =0, или
G2 h1 + Fи2 h2 +G4 h3 + Fи4 h4 + FM' 2 h5 − FM2 h6 + FM4 h7 − FУ pa =0 ,
где mp (G1 ) =0, т. к. линии действия вектора G1 проходят через полюс плана скоростей точку р, а плечи моментов h1 =19 мм, h2 =21 мм, h3 =3 мм,
h4 =14 мм, h5 =14 мм, h6 =40 мм, h7 =31 мм, |
|
pа |
|
= |
48 мм. |
|
|
||||
Следовательно. уравновешивающая сила, H, |
|
||||
Теория механизмов и машин. Практикум |
-103- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ |
|
|||||||||||||||||||||||
|
G |
h |
1 |
+ F |
h +G h |
+ F |
h |
|
+ F ' |
h |
− F |
|
h |
+ F |
h |
|
|
|||||||
FУ = |
|
2 |
|
|
и2 |
2 |
3 3 |
и3 |
4 |
M2 |
|
5 |
M2 |
|
6 |
M3 |
|
7 |
= |
|||||
|
|
|
|
|
|
|
|
|
pa |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
44,15 19 +3172,5 21 + 26,49 3 +1053,0 14 + |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
+ 204,65 14 −204,65 40 + 244,88 31 |
|
|
|
|
|
|
|
|
|
||||||||||||
= |
|
|
|
=1761,52 H. |
|
|||||||||||||||||||
|
|
|
|
|
|
|
48 |
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Уравновешивающий момент, H м, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
M У = FУ lOA =1761,52 0,30 =528,46 . |
|
|
|
|
|
|
|
|
||||||||||
В ы в о д. |
Силовое управляющее воздействие равно 528,46 H м. |
|||||||||||||||||||||||
Задача 4.15. Для кулисного механизма определить силовое управ- |
||||||||||||||||||||||||
ляющее воздействие, используя теорему Жуковского, если массы звеньев на- |
||||||||||||||||||||||||
ходятся в соотношении m1 = 0,29 m3 , |
m2 = 0,38 m3 . Данные для построения |
|||||||||||||||||||||||
кинематической схемы механизма и планов скоростей и ускорений взять из |
||||||||||||||||||||||||
задачи 3.3, а для составления расчетной – схемы из задачи 4.3. |
|
|
|
|
|
|||||||||||||||||||
Р е ш е н и е. |
1) По заданным геометрическим параметрам строим |
|||||||||||||||||||||||
кинематическую схему кулисного механизма в масштабном коэффициенте |
||||||||||||||||||||||||
длин μl = 0,01 м/мм (рис. 4.10, а). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2) Для |
полученной |
кинематической |
схемы |
исходя |
из |
|
|
условия |
||||||||||||||||
задачи 3.3 строим план скоростей в соответствующем масштабном коэффи- |
||||||||||||||||||||||||
циенте (рис. 4.10, б). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
Fи3 |
Fи2 |
μl |
= 0,01 |
м |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
Ми |
|
|
|
мм |
μ |
= 0,079 |
|
|
м |
|||||||||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|||||||||||
FG' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
с |
мм |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M3 |
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
FG' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 F |
|
|
|
|
|
|
|
|
M |
3 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
M3 |
|
|
5 |
|
|
|
|
FGи3 |
|
|
|
|
|
||
|
|
|
|
|
GG3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
FM |
|
|
Fи2 |
|
|
|
|
|
GG |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
μV |
= 0,119 |
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
G |
|
G |
с мм |
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
VGS |
|
|
VАО ≡VА |
|
|
|
|
G |
|
|
|
|
h3 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
h4 |
|
h2 |
2 |
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
G |
|
|
|
G |
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
FУ |
|
|
|
|
|
|||||
VBО1 |
VB |
|
|
|
|
|
|
|
|
|
|
h1 |
|
|
|
|
|
|||||||
|
|
|
VBА |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
Рис. 4.10. Силовой анализ кулисного механизма |
|
|
|
|
|
|
|
||||||||||||
Теория механизмов и машин. Практикум |
-104- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
3) Исходя из условия задачи 4.3 составляем расчетную схему (рис. 4.10, а) для кулисного механизма. При этом на звенья механизма действуют следующие силовые факторы.
а) силы инерции ползуна 2 и кулисы 3, H,
Fи3 = m3 aS3 = 4,25 20,02 =85,08 H ,
Fи2 = m2 aS2 = 0,38 m3 aS2 = 0,38 4,25 38,5 = 62,18.
б) силы тяжести звеньев механизма, H,
G1 = m1 q = 0,29 m3 q = 0,29 4,25 9,81 =12,09 , G2 = m2 q = 0,38 m3 q = 0,38 4,25 9,81 =15,84 , G3 = m3 q = 4,25 9,81 = 41,69 .
в) момент пары сил инерции кулисы 3, H м,
Mи3 = JS3 ε3 =0,043 17,60 =0,757 .
Заменяем момент пары сил инерции кулисы 3 парой сил, H:
F |
= F ' |
|
= |
M |
и |
3 |
= |
0,757 |
= 2,23 . |
|
|
|
|
|
|||||
M3 |
M |
3 |
|
lAB |
|
0,34 |
|
||
|
|
|
|
|
|
||||
4) В масштабном коэффициенте скоростей строим повернутый на 90˚ план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 4.10, в). Следуя теореме Жуковского, переносим в одноименные точки повернутого планаG сG кинематическойG G схемы кулисного механизма (рис. 4.10, а)
вектора сил G1 , G2 , G3 , Fи2 , Fи3 , FМ3 и FM' 3 , действующих на звенья меха-
низма (рис. 4.10, в). Для определения величины уравновешивающей силы составим сумму моментов всех сил, действующих на данную систему относительно полюса повернутого плана скоростей.
∑m(Fi ) p =0, или
G2 h1 − Fи2 h4 + FM3 h5 +G3 h3 − Fи3 h2 − FУ pa =0 ,
где mp (G1 ) =0, т. к. линия действия вектора G1 проходит через полюс плана скоростей точку р, а плечи моментов h1 = 40 мм, h2 =3 мм, h3 =19 мм,
h4 = 6 мм, h5 = 46 мм, pа =53 мм.
Уравновешивающая сила, H,
FУ = G2 h1 − Fи2 h4 + FMpa3 h5 +G3 h3 − Fи3 h2 =
=15,84 40 −62,18 6 + 2,23 46 + 41,69 19 −85,08 3 =16,98. 53
Теория механизмов и машин. Практикум |
-105- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Уравновешивающий момент, Н·м,
M У = FУ lOA =16,98 0,20 =3,396 .
В ы в о д. Силовое управляющее воздействие равно 3,396 H м. Задача 4.22. Для механизма качающегося транспортера определить
силовое управляющее воздействие, используя теорему Жуковского. Данные
для построения кинематической |
механизма схемы |
и планов |
скоростей |
и ускорений взять из задачи 3.4, |
а для составления |
расчетной |
схемы – |
из задачи 4.16. |
|
|
|
Р е ш е н и е. 1) По заданным геометрическим параметрам строим кинематическую схему механизма качающегося транспортера в масштабном коэффициенте длин μl = 0,01 м/мм (рис. 4.17, а).
2) Для полученной кинематической схемы исходя из условия задачи 3.6, строим план скоростей в соответствующем масштабном коэффициенте (рис. 4.17, б).
3) Исходя из условия задачи 4.16 составляем расчетную схему (рис. 4.17, а) для механизма качающегося транспортера. При этом на звенья механизма действуют следующие силовые факторы, которые определяем по приведенным формулам.
Силы инерции звеньев механизма, H, равны
Fи1 = m1 aS1 =1,82 0 = 0 H ,
Fи2 = m2 aS2 =5,2 101,4 =527,28 ,
Fи3 = m3 aS3 =3,9 68,95 = 268,91,
Fи4 |
= m4 aS4 |
|
=3,90 52,73 = 205,65 , |
|
|||
Fи5 |
= m5 aS5 |
= 2,34 12,17 = 28,48 . |
|
||||
Cилы тяжести звеньев механизма, H, равны |
|
||||||
|
G1 = m1 q =1,82 9,81 =17,85 , |
|
|||||
|
G2 = m2 q =5,2 9,81 =51,01, |
|
|||||
|
G3 = m3 q =3,9 9,81 =38,26 , |
|
|||||
|
G4 = m4 q =3,9 9,81 =38,26 , |
|
|||||
|
G5 = m5 q = 2,34 9,81 = 22,96 . |
|
|||||
Моменты пары сил инерции звеньев, H м, равны |
|
||||||
|
Mи |
= JS |
ε1 = 0,00679 0 = 0 , |
|
|||
Mи |
|
1 |
|
1 |
|
|
|
2 |
= JS |
ε2 = 0,05909 16,43 = 0,97 , |
|
||||
|
|
|
2 |
|
|
|
|
|
|
||||||
Теория механизмов и машин. Практикум |
-106- |
||||||

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
Mи3 = JS3 ε3 = 0,00721 253,5 =1,83 ;
Mи4 = JS4 ε4 = 0,02188 351,0 =7,68;
Mи5 = JS5 ε5 = JS5 0 =0 .
Заменяем моменты пары сил инерции шатунов 2, 4 и коромысла 3 эквивалентными парами сил, H, и получаем
F |
= F ' |
= |
|
M |
и |
2 |
|
= |
|
0,97 |
|
= 2,62 , |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||
M2 |
M2 |
|
|
lAB |
|
|
|
|
|
|
0,37 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
F |
= F ' |
= |
M |
|
и |
3 |
|
|
= |
1,83 |
|
=9,15 , |
|||||
lBO |
|
|
|
|
|
|
|||||||||||
M3 |
M3 |
|
|
|
|
|
|
|
|
0,20 |
|
||||||
|
|
|
Mи |
|
1 |
|
|
|
|
|
|
|
|
||||
F |
= F ' |
= |
4 |
|
|
= |
7,68 |
= 29,54 . |
|||||||||
|
|
|
|
|
|
|
|
|
|||||||||
M4 |
M4 |
|
|
lCD |
|
|
|
|
|
|
0,26 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
G |
FG |
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Fи2 |
M |
F |
|
M 2 G |
FM4 |
Fи4 |
|
μl = 0,01 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
А |
|
и2 |
M3B |
Fи3 |
|
мм |
|
|
|
|
h5 |
|
|
h4 |
|
|||||||||||||
G ' |
|
S2 |
|
|
|
|
|
3 С |
|
|
M |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
S3 |
S4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
FM 2 |
|
2 |
|
|
|
|
4 |
|
|
и4 |
|
|
|
|
s , о, о , p |
|
|
F ' |
|
|||||||||||
|
|
|
|
G |
|
Mи |
|
|
|
|
|
D, S5 |
Fи5 |
|
|
|
|
1 |
|
|
1 |
|
|
|
||||||
S |
, O |
|
1 G2 |
3 |
|
G3 |
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
M3 |
|
||||||||
|
|
|
О |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
1 |
|
|
|
|
0 |
|
1 |
|
|
FGM' |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G |
|
|
|
|
|
|
|
|
GG |
|
|
|
|
G4 |
|
|
G |
5 |
|
|
|
Fи |
3 |
|
|
|
1 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
3 |
|
|
|
FM' 4 |
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
|
а |
|
|
|
|
|
|
|
|
FM |
|
|
|
s |
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
м |
|
|
|
|
3 |
|
|
|
3 |
|
|
||
|
|
|
|
|
|
VA |
|
|
а |
μV |
|
= |
0,075 |
|
|
|
|
|
|
G3 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
с |
мм |
c |
|
|
F |
|
|
|
|
|
Fи |
|
FУ |
|||||||
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
F |
|
2 |
|||||||||||
s , о, о |
, p |
|
|
|
|
|
|
|
|
|
|
|
|
|
M 2 |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
BA |
|
|
|
|
|
|
|
|
|
|
|
|
|
и |
4 |
|
|
|
|
|||||
1 |
|
|
1 |
|
|
|
|
|
|
|
VD d, s5 |
|
|
|
FM3 |
|
|
|
|
|
s2 |
а F |
|
|||||||
|
|
|
|
|
|
|
|
|
|
s2 |
|
|
|
b |
|
s |
|
|
G2 |
' |
||||||||||
|
|
|
|
|
|
|
VB |
|
|
|
|
|
h8 |
|
|
|
G4 |
|
4 |
|
d, s |
M2 |
||||||||
|
|
|
G |
|
|
b |
|
|
|
VDC |
|
|
|
|
|
G' |
|
5 |
|
|||||||||||
|
|
|
|
|
s3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
G5 |
|
|||||||||
|
|
|
VC |
|
|
|
VGCB |
s4 |
|
|
|
|
|
|
|
|
|
|
FM4 |
F |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h7 |
|
|
|
h |
|
|
h1 |
и5 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
h6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h9 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
б |
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
в |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис. 4.17. Силовой анализ механизма качающегося транспортера
4) В масштабном коэффициенте скоростей строим повернутый на 90˚ план скоростей, поворот осуществляем в направлении движения кривошипа (рис. 4.17, в). В одноименные точки полученной фигуры с кинематической
Теория механизмов и машин. Практикум |
-107- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
схемы механизма качающегося транспортера (рис. 4.17, а) переносим вектора |
||||||||||||||||
внешних сил GG , |
GG |
, GG |
, G |
4 |
, G , |
F |
, F |
, F , |
F |
, FG |
, FG ' |
, F |
, F ' , |
|||
FG |
и FG ' |
1 |
2 |
3 |
|
|
5 |
и2 |
и3 |
и4 |
и5 |
M2 |
M2 |
M3 |
M3 |
|
, действующие на звенья механизма (рис. 4.17, в). Для определения |
||||||||||||||||
M4 |
M4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
величины |
уравновешивающей |
силы |
составим |
сумму |
моментов |
всех |
||||||||||
сил, действующих на данную систему относительно полюса повернутого плана скоростей:
|
|
|
∑m(Fi )p |
= 0 , или |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
G2 h1 +G4 h2 +G3 h2 − Fи2 |
h3 + Fи4 |
h4 − Fи3 h5 + Fи5 |
|
|
|
pd |
|
− |
||||||||||||||||
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
− F ' |
h − F h − F |
' |
h − F h − F |
|
pb |
|
+ F |
|
pa |
|
= 0, |
|||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
M |
2 |
6 |
|
M2 |
9 |
M4 |
7 |
M4 |
8 |
M3 |
|
|
|
У |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
где |
m |
p |
(G ) =0, |
m |
p |
(G ) =0 , |
m |
p |
(F |
' |
) =0 , т. к. линии действия векторов G |
|||||||||||||||||
и GG |
|
|
1 |
|
|
3 |
|
|
M3 |
|
|
|
|
|
|
|
1 |
|||||||||||
, |
FG ' |
проходят через полюс плана скоростей точку р, а плечи моментов |
||||||||||||||||||||||||||
3 |
|
|
M3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h1 =1 мм, h2 =19 мм, h3 =13 мм, h4 =1 мм, h5 =18 мм, h6 =12 мм, h7 =39 мм,
h8 =8 мм, h9 =25 мм, |
|
pb |
|
=56 мм, |
|
pd |
|
=68 |
мм, |
|
pа |
|
=51 мм. |
|
|
|
|
|
|
||||||||
Следовательно, уравновешивающая |
сила, H, равна |
||||||||||||
|
|
|
−G2 h1 −G4 h2 −G3 h2 + Fи2 |
h3 − Fи4 |
h4 + Fи3 h5 − |
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
+ F ' |
h + F h + F ' |
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
−F |
|
|
pd |
|
h + F h + F |
|
|
|
pb |
|
|
|
|
|||||||||||
F = |
и5 |
|
|
|
M2 |
6 |
M2 |
9 |
|
M4 |
7 |
M4 |
8 |
M3 |
|
|
|
|
|
= |
|
|
|||||
|
|
|
|
|
|
|
|||||||||||||||||||||
|
У |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
pa |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
−51,01 1 −38,26 19 −38, 26 19 +527,28 13 −205,65 1+ 268,91 18 − |
|
|||||||||||||||||||||||||
|
|
−28, 48 |
|
68 + 2,62 12 |
+ 2,62 25 + 29,54 39 + 29,54 8 +9,15 |
|
56 |
|
|
|
|
|
|||||||||||||||
= |
|
|
|
|
|
= |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
51 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
= |
10045,56 =196,97. |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
512 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Уравновешивающий момент, H м,
M У = FУ lOA =196,97 0,15 = 29,54 .
В ы в о д. Силовое управляющее воздействие равно 29,54 H м.
Задача 4.23. Определить силовое управляющее воздействие, используя теорему Жуковского, если ползун кривошипно-ползунного механизма находится под действием силы полезного сопротивления Fпс. Данные для
построения кинематической схемы и планов скоростей и ускорений взять из задачи 3.7, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.6.
Задача 4.24. Определить силовое управляющее воздействие, используя теорему Жуковского, если коромысло шарнирного механизма находится
Теория механизмов и машин. Практикум |
-108- |

4. СИЛОВОЙ АНАЛИЗ ПЛОСКИХ РЫЧАЖНЫХ МЕХАНИЗМОВ
под действием силы полезного сопротивления Fпс. Данные для построения
кинематической схемы и планов скоростей и ускорений взять из задачи 3.8, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.7.
Задача 4.25. Определить силовое управляющее воздействие, используя теорему Жуковского, если выходное звено плоского рычажного механизма находится под действием силы полезного сопротивления Fпс. Данные
для построения кинематической схемы и планов скоростей взять из задачи 3.9, а для составления расчетной схемы и значение силы полезного сопротивления – из задачи 4.8.
Теория механизмов и машин. Практикум |
-109- |