

3_modul_kruglikov
.pdfбудет меньше арифметической суммы токов. Следовательно, при номинальных нагрузках трансформаторов ток, потребляемый приемником энергии, будет меньше суммы номинальных токов трансформаторов.
Для трансформаторов различных мощностей активные и реактивные составляющие напряжений короткого замыкания различны: у трансформатора большей мощности реактивное сопротивление и реактивная составляющая напряжения короткого замыкания больше, а активное сопротивление и активная составляющая напряжения короткого замыкания меньше, чем у трансформатора меньшей мощности. Поэтому условие равенства активных и реактивных составляющих напряжений коротких замыканий делает нежелательным включение на параллельную работу трансформаторов, номинальные мощности которых отличаются более чем в 2,5 раза.
8) 1. ТОК ХОЛОСТОГО ХОДА.
При синусоидальном напряжении и потока, как холостого хода имеет несинусоидальную форму, за счет насыщения железа в области амплитуды потока. Рассмотрим какие потоки и ЭДС в однофазном тр-ре.
Ф0 ® E1, E2 ФS1 ® E2S
ЭДС рассеяния
e1S = -LS(dl0/dt) = -LS = -Im wlS coswt
ЭДС рассеяния в комп. Форме (wlS = x)
В первой обмотке три ЭДС –  ,
,  ,
,
Фаза ЭДС 
E1 = -W1(dФ/dt) = -W |
= wW1Фm sin(wt - p/2), (wW1Фm = E1m) |
Действующие значения ЭДС обмотки
E1max = wW1Фm = 2pf1W1Фm
E1 =
E1 = 4,44 f1W1Фm E2 = 4,44 f1W2Фm
E1/E2 = k U1/U2 = k
При x x
U2 = E2

U1 » E1
Потери при x.x тра-ра.
Мощность потребляемая трансформатором при xx идет на покрытие в обмотках и стали.
P0 = p эл1 + Pмагн
pэл1 = 1 ¸ 2% от P0
Поэтому, мощность при xx тра-ра идет в основном на покрытие потерь в стали. (гистерезис и вихревые токи)
 pr = sr(f/100)B2
pr = sr(f/100)B2
Pосн мг
 pb = sвх(f/100)2B2 pдоб = 15 ¸ 20% Pосн мг Итак P0 = (1,15 ¸ 1,2) Pмго
pb = sвх(f/100)2B2 pдоб = 15 ¸ 20% Pосн мг Итак P0 = (1,15 ¸ 1,2) Pмго
Схема замещения трансформатора при xолостом xоде.
Исследование работы трансформатора упрощается, если действительный тр-р, в котором обмотки связаны между собой электромагнитно заменить схемой элементы которой связаны между собой только электрически. Такая схема называется схемой замещения трансформатора. Схема замещения должна удовлетворять основным урвнениям ЭДС и МДС тра-ра.
Цепь ab - цепь намагничевания
zm, rm, xm параметры цепи намагн.
Определение параметров экспериментально zm, xm,rm.
P0, U, I0 |
|
|
|
z0 = |
; r0 = |
; x0 = |
|
т. к. r1 << rm x1 << xm , то |
|
||
zm » z0 = |
; rm » r0 = |
; xm » x0 = |
|
итак из опыта xx определяем:
1.параметры цепи намагничивания
2.потери в стали
3.определяем коэффициент тр-ции.
9.РЕЖИМ КОРОТКОГО ЗАМЫКАНИЯ ТРАНСФОРМАТОРА
Режимом короткого замыкания трансформатора называется такой режим, когда выводы вторичной обмотки замкнуты токопроводом с сопротивлением, равным нулю (ZH = 0). Короткое замыкание трансформатора в условиях эксплуатации создает аварийный режим, так как вторичный ток, а следовательно, и первичный увеличиваются в несколько десятков раз по сравнению с номинальным. Поэтому в цепях с трансформаторами предусматривают защиту, которая при коротком замыкании автоматически отключает трансформатор.
В лабораторных условиях можно провести испытательное короткое замыкание трансформатора, при котором накоротко замыкают зажимы вторичной обмотки, а к первичной подводят такое напряжение Uк, при котором ток в первичной обмотке не превышает номинального значения (Iк < I1ном). При этом выраженное в процентах напряжение Uк, при Iк = I1ном обозначают uK и называют напряжением короткого замыкания трансформатора. Это характеристика трансформатора, указываемая в паспорте.
Таким образом (%):
где U1ном — номинальное первичное напряжение.
Напряжение короткого замыкания зависит от высшего напряжения обмоток трансформатора. Так, например, при высшем напряжении 6—10 кВ uK = 5,5%, при 35 кВ uK = 6,5÷7,5%, при 110 кВ uK = 10,5% и т. д. Как видно, с повышением номинального высшего напряжения увеличивается напряжение короткого замыкания трансформатора.
При напряжении Uк составляющем 5—10% от номинального первичного напряжения, намагничивающий ток (ток холостого хода) уменьшается в 10—20 раз или еще более значительно. Поэтому в режиме короткого замыкания считают, что
Основной магнитный поток Ф также уменьшается в 10—20 раз, и потоки рассеяния обмоток становятся соизмеримыми с основным потоком.
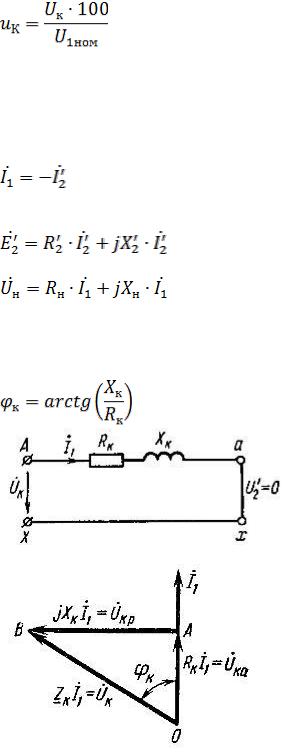
Так как при коротком замыкании вторичной обмотки трансформатора напряжение на ее зажимах U2 = 0, уравнение э. д. с. для нее принимает вид
а уравнение напряжения для трансформатора записывается как
Этому уравнению соответствует схема замещения трансформатора, изображенная на рис. 1.
Векторная диаграмма трансформатора при коротком замыкании соответствующая уравнению и схеме рис. 1, показана на рис. 2. Напряжение короткого замыкания имеет активную и реактивную составляющие. Угол φк между векторами этих напряжений и тока зависит от соотношения между активной и реактивной индуктивной составляющими сопротивления трансформатора.
Рис. 1. Схема замещения трансформатора при коротком замыкании
Рис. 2. Векторная диаграмма трансформатора при коротком замыкании
У трансформаторов с номинальной мощностью 5—50 кВА XK/RK = 1 ÷ 2; с номинальной мощностью 6300 кВА и более XK/RK = 10 и более. Поэтому считают, что у трансформаторов большой мощности UK = Uкр, а полное сопротивление ZК = Хк.
Опыт короткого замыкания.
Этот опыт, как и обмотка замкнута такое напряжение
опыт холостого хода, проводят для определения параметров трансформатора. Собирают схему (рис. 3), в которой вторичная накоротко металлической перемычкой или проводником с сопротивлением, близким к нулю. К первичной обмотке подводится Uк, при котором ток в ней равен номинальному значению I1ном.
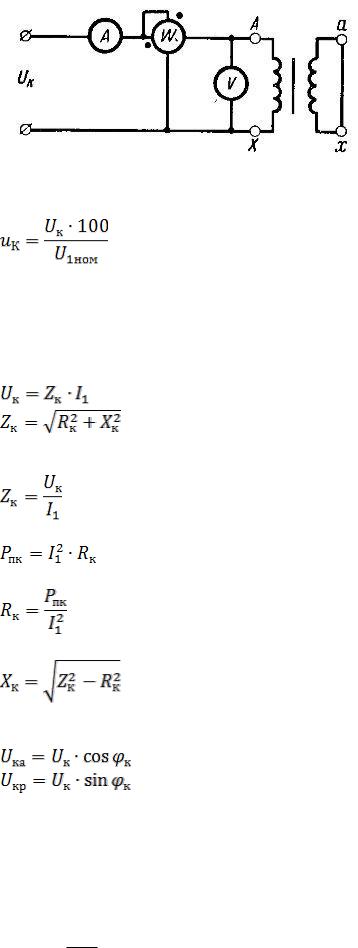
Рис. 3. Схема опыта короткого замыкания трансформатора По данным измерений определяют следующие параметры трансформатора.
Напряжение короткого замыкания
где UK — измеренное вольтметром напряжение при I1, = I1ном. В режиме короткого замыкания UK очень мало, поэтому потери холостого хода в сотни раз меньше, чем при номинальном напряжении. Таким образом, можно считать, что Рпо = 0 и измеряемая ваттметром мощность — это потери мощности Рпк, обусловленные активным сопротивлением обмоток трансформатора.
При токе I1, = I1ном получают номинальные потери мощности на нагрев обмоток Рпк.ном, которые называютсяэлектрическими потерями или потерями короткого замыкания.
Из уравнения напряжения для трансформатора, а также из схемы замещения (см. рис. 1) получаем
где ZK — полное сопротивление трансформатора.
Измерив Uк и I1 можно вычислить полное сопротивление трансформатора
Потери мощности при коротком замыкании можно выразить формулой
поэтому активное сопротивление обмоток трансформатора
находят из показаний ваттметра и амперметра. Зная Zк и RК, можно вычислить индуктивное сопротивление обмоток:
Зная Zк, RК и Хк трансформатора, можно построить основной треугольник напряжений короткого замыкания (треугольник ОАВ на рис. 2), а также определить активную и индуктивную составляющие напряжения короткого замыкания:
Опыт короткого замыкания
Короткое замыкание трансформатора (испытательное) представляет собой такой режим его работы, при котором вторичная обмотка замкнута накоротко (U2 = 0), а к первичной обмотке подводится пониженное напряжение U1к обеспечивающее номинальные токи в обмотках. Напряжение U1к
выраженное в процентах от номинального напряжения первичной обмотки, называется напряжением короткого замыкания, т.е.
Uк U1к 100% . U1н
Обычно Uк = 3 – 8% и увеличивается с ростом мощности и напряжения трансформатора.
Опыт короткого замыкания проводится с целью определения напряжения и потерь короткого замыкания. По результатам опыта также м огут быть найдены параметры схемы замещения и некоторые характеристики трансформатора.
Согласно ГОСТу напряжение Uк и потери Рк короткого замыкания приводятся к значению, соответствующему номинальной рабочей температуре обмотки 75°С.
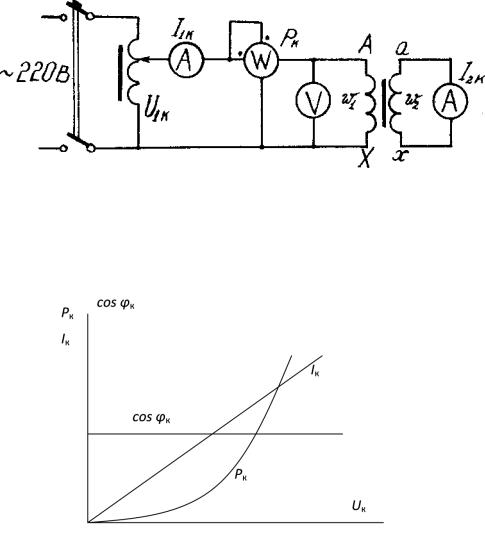
Схема соединений для опыта короткого замыкания трансформатора изображена на рис.4.
Рис. 4. Схема соединений для опыта короткого замыкания
При проведении опыта следует, не ограничиваясь точкой номинального значения тока, снять характеристики короткого замыкания
U1к = f4(I1к), Pк = f5(I1к), cosφк = f6(I1к) в пределах I1к = (0,5 – 1,25)I1н.
Рис.5. Характеристики короткого замыкания трансформатора
Используя полученные данные, построить характеристики короткого замыкания. Примерный вид этих характеристик показан на рис.5.
Поскольку при опытах короткого замыкания к первичной обмотке подводится через автотрансформатор небольшое напряжение U1к, то основной магнитный поток невелик и составляет 2 – 6% от магнитного потока при холостом ходе. Поэтому потери в стали, пропорциональные квадрату магнитной индукции, незначительны и ими можно пренебречь. Следовательно, вся мощность Pк, подведенная к трансформатору в этом режиме,
практически расходуется на покрытие потерь в меди первичной и вторичной обмоток
Pк Pм1 Рм2 .
Потери в меди, измеренные при опыте короткого замыкания, принимаются равными потерям в меди при номинальном режиме (токи в обмотках в обоих случаях равны номинальным).
Коэффициент мощности при коротком замыкании можно рассчитать по формуле
соs к |
|
Рк |
|
. |
|
|
|
|
U1к |
|
|
|
|
|
|||
|
|
I1н |
r |
|
x |
|
||
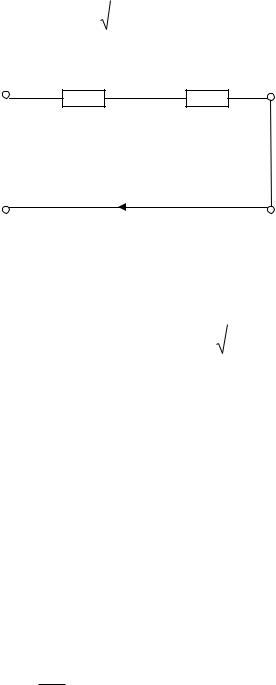
На рисунке 1.6. изображена схема замещения трансформатора в режиме короткого замыкания, где |
и |
– сопротивления, определяющие |
||||||
|
|
|
|
|
2 |
|
2 |
|
падение напряжения на вторичной обмотке трансформатора и приведенные к его первичной обмотке. Параметры этой схемы могут быть найдены по измеренным значениям U1к , I1н , Pк .
|
|
|
|
U1к |
|
|
|
|
|
|
|||
Z1 Z2 |
Zк |
|
|
, |
||
|
I1н |
|||||
|
rк |
Рк |
|
|
||
|
, |
|
||||
|
|
|
||||
r1 r2 |
I 2 |
|
|
|
||
|
|
|
1н |
|
||
|
|
2 |
2 |
|
|
|
xк Zк |
rк . |
|
|
|||
x1 x2 |
|
|
||||
|
Z1, r1, x1 |
|
|
|
|
|
А |
|
|
Z2 |
,r2 |
,x2 |
|
а
U1к
I1к
х
Х
Рис.6. Схема замещения трансформатора в режиме короткого замыкания
Эти параметры следует привести к температуре 75°С:
|
r 1 75 , Z |
|
|
|
|
|
r |
к |
r 2 |
х2 . |
|||
к75 |
к |
|
к75 |
к |
||
Здесь θ – температура обмоток, при которой найдены значения rк и хк (при холодном трансформаторе θ – температура окружающей среды); |
|||||||||||||||
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|||
|
|
|
. |
|
|
|
|
|
|
|
|||||
235 |
|
|
|
|
|
|
|
||||||||
Напряжение короткого замыкания Uк, его активная Uкa и реактивная Uкp составляющие, приведенные к 75°С, равны |
|||||||||||||||
|
|
U |
к |
|
|
I1н Zк75 |
100% , |
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
U1н |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
U |
кa |
|
I1н rк75 |
100% , U |
кp |
|
I1н хк |
100% . |
|||||||
|
|||||||||||||||
|
|
|
|
|
|||||||||||
|
|
|
|
|
U1н |
|
|
|
|
U1н |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Потери короткого замыкания |
|
|
|
|
|||||||||||
P |
|
I |
2 |
r |
. |
|
. |
|
|
|
|
||||
к |
|
|
1н |
к75 |
|
|
|
|
|
|
|
||||
Коэффициент мощности
cos ê rê 75 .
Zê 75
При проведении опыта короткого замыкания следует учесть, что величина напряжения короткого замыкания небольшая. Поэтому напряжение
более удобно подводить к обмотке ВН при закороченной обмотке НН.
10 АСИНХРОННЫЕ ДВИГАТЕЛИ УСТРОЙСТВО И ПРИНЦИП РАБОТЫ Асинхронные электродвигатели (АД) находят в народном хозяйстве широкое применение. По разным данным до 70% всей электрической энергии,
преобразуемой в механическую энергию вращательного или поступательного движения, потребляется асинхронным двигателем. Электрическую энергию в механическую энергию поступательного движения преобразуют линейные асинхронные электродвигатели, которые широко используются в электрической тяге, для выполнения технологических операций. Широкое применение АД связано с рядом их достоинств. Асинхронные двигатели - это самые простые в конструктивном отношении и в изготовлении, надежные и самые дешевые из всех типов электрических двигателей. Они не имеют щеточноколлекторного узла либо узла скользящего токосъема, что помимо высокой надежности обеспечивает минимальные эксплуатационные расходы. В зависимости от числа питающих фаз различают трехфазные и однофазные асинхронные двигатели.Трехфазный асинхронный двигатель при определенных условиях может успешно выполнять свои функции и при питании от однофазной сети. АД широко применяются не только в промышленности, строительстве, сельском хозяйстве, но и в частном секторе, в быту, в домашних мастерских, на садовых
участках. Однофазные асинхронные двигатели приводят во вращение стиральные машины, вентиляторы, небольшие деревообрабатывающие станки, электрические инструменты, насосы для подачи воды. Чаще всего для ремонта или создания механизмов и устройств промышленного изготовления или собственной конструкции применяют трехфазные АД. Причем в распоряжении конструктора может быть как трехфазная, так и однофазная сеть.
Возникают проблемы расчета мощности и выбора двигателя для того или другого случая, выбора наиболее рациональной схемы управления асинхронным двигателем, расчета конденсаторов, обеспечивающих работу трехфазного асинхронного двигателя в однофазном режиме, выбора сечения и типа проводов, аппаратов управления и защиты. Такого рода практическим проблемам посвящена предлагаемая вниманию читателя книга. В книге приводится также описание устройства и принципа действия асинхронного двигателя, основные расчетные соотношения для двигателей в трехфазном и однофазном режимах.
Устройство и принцип действия асинхронных электродвигателей 1. Устройство трехфазных асинхронных двигателей
Трехфазный асинхронный двигатель (АД) традиционного исполнения, обеспечивающий вращательное движение, представляет собой электрическую
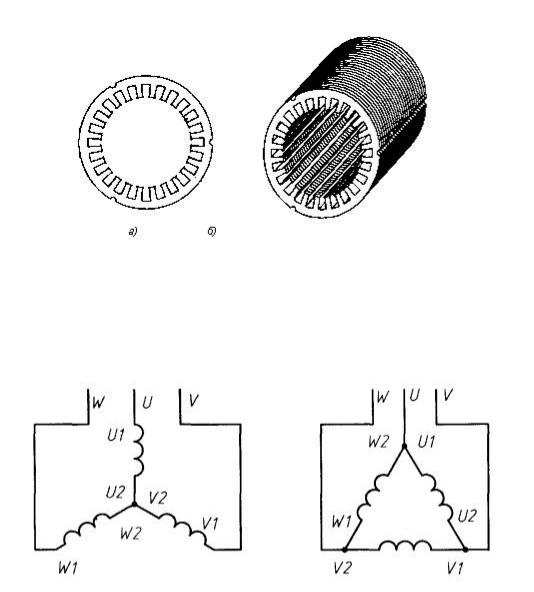
машину, состоящую из двух основных частей: неподвижного статора и ротора, вращающегося на валу двигателя. Статор двигателя состоит из станины, в которую впрессовывают так называемое электромагнитное ядро статора, включающее магнитопровод и трехфазную распределенную обмотку статора. Назначение ядра - намагничивание машины или создание вращающегося магнитного поля. Магнитопровод статора состоит из тонких (от 0,28 до 1 Мм) изолированных друг от друга листов, штампованных из специальной электротехнической стали. В листах различают зубцовую зону и ярмо (рис. 1.а). Листы собирают и скрепляют таким образом, что в магнитопроводе формируются зубцы и пазы статора (рис. 1.б). Магнитопровод представляет собой малое магнитное сопротивление для магнитного потока, создаваемого обмоткой статора, и благодаря явлению намагничивания этот поток усиливает.
Рис. 1 Магнитопровод статора
В пазы магнитопровода укладывается распределенная трехфазная обмотка статора. Обмотка в простейшем случае состоит из трех фазных катушек, оси которых сдвинуты в пространстве по отношению друг к другу на 120°. Фазные катушки соединяют между собой по схемам звезда, либо треугольник
(рис. 2).
Рис 2. Схемы соединения фазных обмоток трехфазного асинхронного двигателя в звезду и в треугольник
Более подробные сведения о схемах соединения и условных обозначениях начал и концов обмоток представлены ниже. Ротор двигателя состоит из магнитопровода, также набранного из штампованных листов стали, с выполненными в нем пазами, в которых располагается обмотка ротора. Различают два вида обмоток ротора: фазную и короткозамкнутую. Фазная обмотка аналогична обмотке статора, соединенной в звезду. Концы обмотки ротора соединяют вместе и изолируют, а начала присоединяют к контактным кольцам, располагающимся на валу двигателя. На контактные кольца, изолированные друг от друга и от вала двигателя и вращающиеся вместе с ротором, накладываются неподвижные щетки, к которым присоединяют внешние цепи. Это позволяет, изменяя сопротивление ротора, регулировать скорость вращения двигателя и ограничивать пусковые токи. Наибольшее применение получила короткозамкнутая обмотка типа «беличьей клетки». Обмотка ротора крупных двигателей включает латунные или медные стержни, которые вбивают в пазы, а по торцам устанавливают короткозамыкающие кольца, к которым припаивают или приваривают стержни. Для серийных АД малой и средней мощности обмотку ротора изготавливают путем литья под давлением алюминиевого сплава. При этом в пакете ротора 1 заодно отливаются стержни 2 и короткозамыкающие кольца 4 с крылышками вентиляторов для улучшения условий охлаждения двигателя, затем пакет напрессовывается на вал 3. (рис. 3). На разрезе, выполненном на этом рисунке, видны профили пазов, зубцов и стержней ротора.
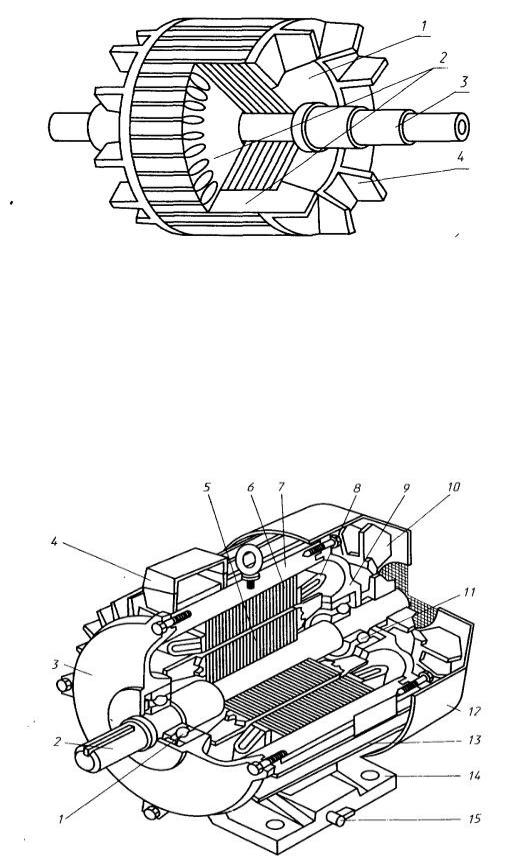
Рис. 3. Ротор аснхронного двигателя с короткозамкнутой обмоткой
Общий вид асинхронного двигателя серии 4А представлен на рис. 4 [2]. Ротор 5 напрессовывается на вал 2 и устанавливается на подшипниках 1 и 11 в расточке статора в подшипниковых щитах 3 и 9, которые прикрепляются к торцам статора 6 с двух сторон. К свободному концу вала 2 присоединяют нагрузку. На другом конце вала укрепляют вентилятор 10 (двигатель закрытого обдуваемого исполнения), который закрывается колпаком 12. Вентилятор обеспечивает более интенсивное отведение тепла от двигателя для достижения соответствующей нагрузочной способности. Для лучшей теплоотдачи станину отливают с ребрами 13 практически по всей поверхности станины. Статор и ротор разделены воздушным зазором, который для машин небольшой мощности находится в пределах от 0,2 до 0,5 мм. Для прикрепления двигателя к фундаменту, раме или непосредственно к приводимому в движение механизму на станине предусмотрены лапы 14 с отверстиями для крепления. Выпускаются также двигатели фланцевого исполнения. У таких машин на одном из подшипниковых щитов (обычно со стороны вала) выполняют фланец, обеспечивающий присоединение двигателя к рабочему механизму.
Рис. 4. Общий вид асинхронного двигателя серии 4А
Выпускаются также двигатели, имеющие и лапы, и фланец. Установочные размеры двигателей (расстояние между отверстиями на лапах или фланцах), а также их высоты оси вращения нормируются. Высота оси вращения - это расстояние от плоскости, на которой расположен двигатель, до оси вращения вала ротора. Высоты осей вращения двигателей небольшой мощности: 50, 56, 63, 71, 80, 90, 100 мм.
2. Принцип действия трехфазных асинхронных двигателей
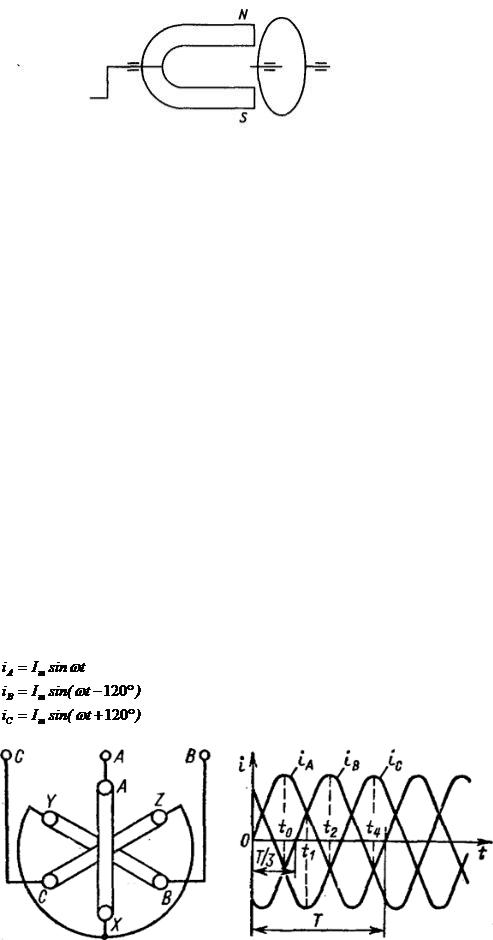
Выше отмечалось, что трехфазная обмотка статора служит для намагничивания машины или создания так называемого вращающегося магнитного поля двигателя. В основе принципа действия асинхронного двигателя лежит закон электромагнитной индукции. Вращающееся магнитное поле статора пересекает проводники короткозамкнутой обмотки ротора, отчего в последних наводится электродвижущая сила, вызывающая в обмотке ротора протекание переменного тока. Ток ротора создает собственное магнитное поле, взаимодействие его с вращающимся магнитным полем статора приводит к вращению ротора вслед за полями. Наиболее наглядно идею работы асинхронного двигателя иллюстрирует простой опыт, который еще в XVIII веке демонстрировал французский академик Араго (рис. 5). Если подковообразный магнит вращать с постоянной скоростью вблизи металлического диска, свободно расположенного на оси, то диск начнет вращаться вслед за магнитом с некоторой скоростью, меньшей скорости
вращения магнита.
Рис. 5. Опыт Араго, объясняющий принцип работы асинхронного двигателя
Это явление объясняется на основе закона электромагнитной индукции. При движении полюсов магнита около поверхности диска в контурах под полюсом наводится электродвижущая сила и появляются токи, которые создают магнитное поле диска. Читатель, которому трудно представить проводящие контуры в сплошном диске, может изобразить диск в виде колеса со множеством проводящих ток спиц, соединенных ободом и втулкой. Две спицы, а также соединяющие их сегменты обода и втулки и представляют собой элементарный контур. Поле диска сцепляется с полем полюсов вращающегося постоянного магнита, и диск увлекается собственным магнитным полем. Очевидно, наибольшая электродвижущая сила будет наводиться в контурах диска тогда, когда диск неподвижен, и напротив, наименьшая, когда близка к скорости вращения диска. Перейдя к реальному асинхронному двигателю отметим, что короткозамкнутую обмотку ротора можно уподобить диску, а обмотку статора с магнитопроводом - вращающемуся магниту. Однако вращение магнитного поля в неподвижном статоре а осуществляется благодаря трехфазной системе токов, которые протекают в трехфазной обмотке с пространственным сдвигом фаз.
11. ВРАЩАЮЩЕЕСЯ МАГНИТНОЕ ПОЛЕ Вращающееся магнитное поле. Обычно под вращающимся магнитным полем понимается магнитное поле, вектор магнитной индукции которого, не
изменяясь по модулю, вращается с постоянной угловой скоростью. Вращающееся магнитное поле создают, накладывая два или более разнонаправленных переменных, зависящих от времени по синусоидальному закону, магнитных полей одинаковой частоты, но сдвинутых друг относительно друга по фазе.
Разность фаз для двухфазных систем (два перпендикулярных электромагнита) должна составлять 90°, а для 3-фазных (три электромагнита, направленных в одной плоскости под углом 120° друг к другу) 120°.
Принцип получения вращающегося магнитного поля. В основе работы асинхронных двигателей лежит вращающееся магнитное поле, создаваемое МДС обмоток статора.
Принцип получения вращающегося магнитного поля с помощью неподвижной системы проводников заключается в том, что если по системе неподвижных проводников, распределенных в пространстве по окружности, протекают токи, сдвинутые по фазе, то в пространстве создается вращающееся поле. Если система проводников симметрична, а угол сдвига фаз между токами соседних проводников одинаков, то амплитуда индукции вращающегося магнитного поля и скорость постоянны. Если окружность с проводниками развернуть на плоскость, то с помощью подобной системы можно получить «бегущее» поле.
Вращающееся поле переменного тока трехфазной цепи. Рассмотрим получение вращающегося поля на примере трехфазного асинхронного двигателя с тремя обмотками, сдвинутыми по окружности на 120° (рис.3.5) и соединенными звездой. Пусть обмотки статора питаются симметричным трехфазным напряжением со сдвигом фаз напряжений и токов на 120°.
Если для обмотки АХ принять начальную фазу тока равной нулю, тогда мгновенные значения токов имеют вид
Графики токов представлены на рис. 3.6. Примем, что в каждой обмотке всего два провода, занимающие два диаметрально расположенные паза.
Рис. 3.5 |
Рис. 3.6 |
Как видно из рис. 3.6, в момент времени to ток в фазе А положительный, а в фазах В и С – отрицательный.
Если ток положительный, то направление тока примем от начала к концу обмотки, что соответствует обозначению знаком «х» в нача ле обмотки и знаком «·» (точка) в конце обмотки. Пользуясь правилом правоходового винта, легко найти картину распределения магнитного поля для момента времени to(рис. 3.7, а). Ось результирующего магнитного поля с индукцией Втрез расположена горизонтально.

Рис. 3.7
На рис. 3.7, б показана картина магнитного поля в момент времени ti, соответствующий изменению фазы тока на угол  = 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле
= 60°. В этот момент времени токи в фазах А и В положительные, т. е. ток идет в них от начала к концу, а ток в фазе С – отрицательный, т. е. идет от конца к началу. Магнитное поле
оказывается повернутым по часовой стрелке на угол  = 60°. Если угловая частота тока
= 60°. Если угловая частота тока  , то
, то  . (Здесь
. (Здесь  , где
, где  – частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы
– частота тока в сети). В моменты времени t2 и t3 ось магнитного поля соответственно повернется на углы  и
и  (рис. 3.6, в и г). Через время, равное
(рис. 3.6, в и г). Через время, равное
периоду Т, ось поля займет первоначальное положение. Следовательно, за период Тполе делает один оборот (рис. 3.7, д) ( |
( |
)). В рассмотренном случае число полюсов 2р = 2 и магнитное поле вращается с частотой n1=60f1=60∙50=3000 об / мин |
(f1=50 Гц – |
промышленная частота). Можно доказать, что результирующая магнитная индукция представляет собой вращающееся поле с амплитудой |
|
где Вт – максимальная индукция одной фазы; Вmрез – максимальная индукция трех фаз;  – угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
– угол между горизонтальной осью и прямой, соединяющей центр с произвольной точкой между статором и ротором.
Направление вращения поля. В рассмотренном случае направление вращения поля совпадает с направлением движения часовой стрелки. Если поменять местами выводы любых двух фаз питающего напряжения, например B и С, что соответствует обратной последовательности фаз, то направление вращения поля будет противоположным (против движения часовой стрелки), т. е. магнитное поле реверсируется (ср. рис. 3.8).
Формула частоты вращения поля. Если число катушек в каждой фазе увеличить, а сдвиг фаз между токами сохранить в 120°, то частота вращения поля изменится. Например, при двух катушках в каждой фазе, расположенных, как показано на рис. 3.9, поле за один период повернется в пространстве на 180°.
Рис. 3.8 Рис. 3.9 Рис. 3.10
Для получения картины поля возьмем момент времени to, когда ток в фазе А положительный, а токи в фазах В и С отрицательные. Пользуясь правилом знаков для токов находим, что в данном случае число полюсов 2р = 4 или р = 2 и тогда n1 = 60f1 / p = 3000/2 =1500 об/мин. Рассуждая аналогично, для трех катушек в каждой фазе находим картину поля, показанную на рис.3.10. Здесь р = 3 и, следовательно, n1 = 1000 об/мин.
Общая формула для определения частоты вращения, об/мин, будет n1 = 60 f1 / p (3.1)
Во всех рассмотренных случаях катушки каждой фазы были соединены между собой последовательно. Именно при таком соединении частота вращения поля статора для р = 1, 2 и 3 при f1= 50 Гц составила соответственно 3000, 1500 и 1000 об/мин.
Параллельное соединение катушек. Покажем, что при переключении катушек из одной фазы в другую и при их параллельном соединении число полюсов поля и, следовательно, частота вращения поля будут отличными от рассмотренных. В качестве примера возьмем по две катушки в каждой фазе и соединим их между собой параллельно так, как показано на рис.3.11,а и в развернутом виде на рис. 3.11,6. Из картины поля видно, что р = 1, а частота вращения n1 = 3000 об/мин. Выше было показано, что при последовательном соединении тех же катушек частота вращения была 1500 об/мин. При частоте тока в в сети 50 Гц частота вращения поля статора определяется из выражения
п1 = 60 f1 / p = 60 ∙50 / p .