

3.3 Регулируемый электропривод переменного тока
В современных регулируемых электроприводах переменного тока используются три основные структуры системы автоматического регулирования (САР), приведенные на листе 3 грфической части проекта):
а– реализация заданной статической зависимости между частотой f и действующим значением U1, питающего электродвигатель напряжения (скалярное управление электроприводом);
б– алгоритм векторного управления;
в– алгоритм прямого управления моментом.
Блок-схема скалярного управления (лист 3 схема а). При управлении с разомкнутым контуром частота вращения электродвигателя регулируется изменением частоты f выходного напряжения таким образом, что реальная частота вращения вала будет определяться моментом нагрузки и выходной частотой f преобразователя.
При регулировании частоты питающего напряжения нужно обеспечить необходимую жесткость механических характеристик n2 =f(M) асинхронного электродвигателя во всем диапазоне регулирования.
Условия обеспечения надлежащей жесткости механических характеристик и перегрузочной способности возможно при сохранении постоянства амплитуды вращающегося поля статора. На рис. 3.1 показан желаемый вид механических характеристик при питании электродвигателя. Чтобы получить такого рода характеристики, необходимо выполнить условия постоянства амплитуды потока Ф1т при различной выходной частоте.
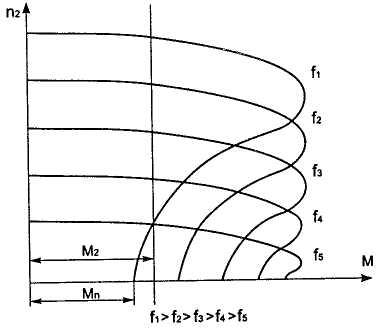
Рис. 3.1
Пренебрегая падением напряжения в активном и индуктивном сопротивлениях обмотки статора, можно записать
![]()
Отсюда видно, что для сохранения Ф1т = const при различных значениях выходной частоты инвертора необходимо регулировать ее исходя из условия
При значительном уменьшении частоты, следовательно и U1 , перегрузочная способность электродвигателя несколько снижается из-за относительного увеличения падения напряжения в статорной обмотке в связи с очевидным возрастанием потребляемого тока и, как следствие, снижения амплитуды вращающегося поля.
В практике реализации частотно-регулируемого электропривода микроконтроллер системы управления обеспечивает ввод и обработку параметров, составляющих в конечном итоге определенную конфигурацию характеристики U = /(/). примерный вид характеристики «напряжение—частота» приведен на рис. 3.2.
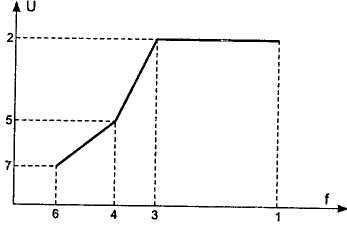
Рис. 3.2
В некоторых типах частотно-регулируемых электроприводов в памяти управляющего контроллера хранится набор характеристик «напряжение-частота», одну из которых можно установить при инсталляции привода в зависимости от конкретных условий работы. Иногда их количество может достигать 25.
Система управления, в зависимости от применения, может реализовывать заданную статическую зависимость указанного соотношения, например различный угол наклона зависимости U/f. При этом САР измеряет фазные токи ia, ib либо ток в минусовой шине инвертора и вычисляет активное значение тока, пропорциональное моменту. В случае перегрузки электродвигателя ток превышает установленное ограничение и выходная частота снижается.
Типичная область применения ПЧ с САР скалярного типа: насосы, вентиляторы, центрифуги, конвейеры. В случае замкнутого управления (наличие обратной связи по скорости) производится регулирование частоты вращения или момента, или обоих параметров поочередно. Регулятор скорости поддерживает частоту вращения, равную заданной, независимо от изменений нагрузки. Регулятор момента поддерживает момент двигателя, равным заданному, при условии изменения скорости электродвигателя. Реализация такого алгоритма возможна только при наличии обратной связи по скорости.
Блок-схема САР с векторным управлением (лист 3 схема б). Такая модель используется для регулирования частоты вращения или момента двигателя, а также обоих параметров поочередно. Типичное применение: краны, подъемники, намоточные устройства, моталки, лебедки, бумажные машины, приводы для металлургической и деревообрабатывающей промышленности.
На схеме: ПИД - пропорционально-интегрально-дифференциальный регулятор; БИ - блок определения постоянной времени ротора; ПК - преобразователь координат; СВ - сетевой выпрямитель; АИН - автономный инвертор напряжения fзад- заданная частота переключений; БФИ - блок-формирователь сигнала; ψзад - канал регулирования потокосцепления; Мзад - канал регулирования момента.
Основной отличительной особенностью векторного управления является реализация пуска «с хода» при подключении преобразователя к уже вращающемуся двигателю. При этом измеряется ток статора iа, ib и число оборотов ротора. Полученные сигналы .вводятся в математическую модель асинхронного электродвигателя (лист 3 схема б).
В модели двигателя производится расчет магнитного потока и разделение тока статора на две составляющие -момент iq и магнитный поток id. Обе составляющие тока могут регулироваться раздельно, по своему каналу и независимо. Это дает возможность при сохранении потока изменять момент электродвигателя.
Дальнейшее совершенствование показателей частотно-регулируемого электропривода стало возможным в результате разработки и реализации специальных алгоритмов прямого управления моментом на основе теории разрывных управляющих воздействий в скользящем режиме, методология которых строится на синтезе математических моделей систем управления, имеющих вид дифференциальных уравнений в форме Коши с разрывной правой частью.
Блок схема САР прямого управления моментом DTC (direct torque control) (лист 3 схема в) состоит из регулятора скорости, устройства задания и ограничения момента, задания потока статора и частоты переключения. Работа системы основана на реализации во времени работы двух моделей:
1. Регулирование в скользящем режиме вектора потокосцепления статора и момента Μ электродвигателя по значениям, вводимым в нее заданных и действительных величин. Такое регулирование осуществляется модулем сверхбыстрых процессоров.
2. Модель асинхронного электродвигателя через каждый промежуток времени осуществляет вычисление действительных значений потока статора и момента по вводимой в нее информации: токам фаз статора, напряжению звена постоянного тока и положению ключей инвертора. Кроме этого, производится вычисление скорости асинхронного электродвигателя и частоты выходного тока инвертора.
На схеме: РМ, РФ, PF - регуляторы момента, потока и частоты переключения; Ud - входное напряжение АИН; S1, S2, S3 - состояние ключей АИН; PC - регулятор скорости; Мзад, Фзад, fзад- задание значений момента, потока; Мд, Фд, пд - действительные значения момента, потока и частоты вращения.
Такой принцип управления моментом позволяет значительно улучшить характеристики электропривода в части снижения времени достижения заданного момента (не более 1.5 мс), увеличения точности управления моментом при очень низких частотах вращения и нулевой скорости. Кроме этого, весьма привлекательны такие особенности, как отсутствие широтно-импульсной модуляции и необходимости использовать датчик частоты вращения электродвигателя. На листе 2 схема в приведен вариант структурной организации ядра системы прямого управления моментом. По сути, модуль быстродействующих процессоров — это гистерезисный регулятор момента, где управляющие воздействия на силовые ключи инвертора (частота и порядок переключения) вырабатываются в зависимости от сравнения заданных значений магнитного потока и момента с их действительными значениями, синтезируемыми математической моделью электродвигателя. В зависимости от конкретной системы управления вектор потокосцепления статора Ψ5 определяется в течение 10—25 мкс, то есть в каждом цикле управления:
![]()
где Us и Is — векторы напряжения и тока статора (рис. 3.22), представленные в неподвижной относительно статора системе координат X, Y;
Rs — активное сопротивление статора.
Вектор напряжения Us определяется исходя из значения измеренного напряжения звена постоянного тока и положения силовых ключей инвертора.
Электромагнитный момент вычисляется, как произведение векторов потокосцеплений статора и ротора
![]()
где ρ — число пар полюсов;
σ — коэффициент рассеивания;
Lm — индуктивность намагничивания.
Алгоритм управления моментом предусматривает: поддержание модуля вектора потока статора Ψ5 постоянным, а регулирование момента достигается изменением утла β между векторами потоков статора и ротора
Учитывая, что постоянная времени роторной цепи любого асинхронного электродвигателя превышает 100 мс, что во много раз медленнее, чем изменение потокосцепления статора ΨS, оптимальная логика переключений «успевает» находить наилучший вектор напряжения, при котором ошибка между созданным и действительным значениями момента будет минимальной.
Для достижения более точного регулирования момента производится корректировка в реальном времени абсолютного значения вектора потокосцепления статора ΨS за счет соответствующего изменения напряжения.
Использование рассмотренного алгоритма прямого управления моментом, помимо высокой точности и быстродействия, предопределяет такие возможности, как инвариантность к изменению параметров объекта и возмущениям.
Несмотря на то, что для вентиляторов типичным является применения ПЧ с САР скалярного типа, к применению предлагается алгоритм векторного управления.
Этот принцип для синхронного двигателя позволяет упростить силовой преобразователь, а именно, применить непосредственный преобразователь частоты. А, применив схему управления с выделением продольной и поперечной составляющих тока статора и регулированием тока возбуждения, получить возможность регулирования коэффициента мощности и ограничения магнитного потока машины номинальным значением.