

Видеопамять
Подсчитайте требуемый объем видеопамяти для монитора размером 640×320 пикселов при использовании 256 цветовых оттенков.
Ответ
204800 байт
Глава 3. Математическое обеспечение анализа проектных решенийТребования к математическим моделям и методам в сапр
Основными требованиями к математическим моделям являются требования адекватности, точности, экономичности.
Модель всегда лишь приближенно отражает некоторые свойства объекта. Адекватность имеет место, если модель отражает заданные свойства объекта с приемлемой точностью. Под точностью понимают степень соответствия оценок одноименных свойств объекта и модели.
Экономичность (вычислительная эффективность) определяется затратами ресурсов, требуемых для реализации модели. Поскольку в САПР используются математические модели, далее речь пойдет о характеристиках именно математических моделей, и экономичность будет характеризоваться затратами машинных времени и памяти.
Адекватность
оценивается перечнем отражаемых свойств
и областями
адекватности.
Область адекватности — область в
пространстве параметров, в пределах
которой погрешности модели остаются
в допустимых пределах. Например, область
адекватности линеаризованной модели
поверхности детали определяется системой
неравенств:
![]() где
где ![]() ,
, ![]() и
и ![]() —
— ![]() -я
координата
-я
координата ![]() -й
точки поверхности в объекте и модели
соответственно;
-й
точки поверхности в объекте и модели
соответственно; ![]() и
и ![]() —
допущенная и предельно допустимая
относительные погрешности моделирования
поверхности, максимум берется по всем
координатам и контролируемым точкам.
—
допущенная и предельно допустимая
относительные погрешности моделирования
поверхности, максимум берется по всем
координатам и контролируемым точкам.
Отметим, что в большинстве случаев области адекватности строятся в пространстве внешних переменных. Так, область адекватности модели электронного радиоэлемента обычно выражает допустимые для применения модели диапазоны изменения моделируемых температур, внешних напряжений, частот.
Аналогичные требования по точности и экономичности фигурируют при выборе численных методов решения уравнений модели.
Фазовые переменные, компонентные и топологические уравнения
Исходные уравнения для формирования моделей на макроуровне
Исходное математическое описание процессов в объектах на макроуровне представлено системами обыкновенных дифференциальных и алгебраических уравнений. Аналитические решения таких систем при типичных значениях их порядков в практических задачах получить не удается, поэтому в САПР преимущественно используются алгоритмические модели. В этом параграфе изложен обобщенный подход к формированию алгоритмических моделей на макроуровне, справедливый для большинства приложений.
Исходными для формирования математических моделей объектов на макроуровне являются компонентные и топологические уравнения.
Компонентными уравнениями называют уравнения, описывающие свойства элементов (компонентов), другими словами, математическая модель элемента (ММЭ) представляется компонентными уравнениями.
Топологические уравнения описывают взаимосвязи в составе моделируемой системы.
В совокупности компонентные и топологические уравнения конкретной физической системы представляют собой исходную математическую модель системы (ММС).
Очевидно, что компонентные и топологические уравнения в системах различной физической природы отражают разные физические свойства, но могут иметь одинаковый формальный вид. Одинаковая форма записи математических соотношений позволяет говорить о формальных аналогиях компонентных и топологических уравнений. Такие аналогии существуют для механических поступательных, механических вращательных, электрических, гидравлических (пневматических), тепловых объектов. Наличие аналогий приводит к практически важному выводу: значительная часть алгоритмов формирования и исследования моделей в САПР оказывается инвариантной и может быть применена к анализу проектируемых объектов в разных предметных областях. Единство математического аппарата формирования ММС особенно удобно при анализе систем, состоящих из физически разнородных подсистем.
В перечисленных выше приложениях компонентные уравнения имеют вид:
|
|
(1) |
топологические уравнения:
|
|
(2) |
где ![]() —
вектор фазовых переменных,
—
вектор фазовых переменных, ![]() —
время.
—
время.
Различают фазовые переменные двух типов, их обобщенные наименования — фазовые переменные типа потенциала(например, электрическое напряжение) и фазовые переменные типа потока (например, электрический ток). В стандарте VHDL AMS их называют соответственно переменными across quantity, вторые — through quantity. Каждое компонентное уравнение характеризует связи между разнотипными фазовыми переменными, относящимися к одному компоненту (например, закон Ома описывает связь между напряжением и током в резисторе), а топологическое уравнение — связи между однотипными фазовыми переменными в разных компонентах.
Модели можно представлять в виде систем уравнений или в графической форме, если между этими формами установлено взаимно однозначное соответствие. В качестве графической формы часто используют эквивалентные схемы.
Ниже рассмотрим примеры компонентных и топологических уравнений для разных типов систем.
Электрические системы
В
электрических системах фазовыми
переменными являются электрические
напряжения и токи. Компонентами систем
могут быть простые двухполюсные элементы
и более сложные двух- и многополюсные
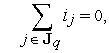
компоненты. К простым двухполюсникам
относятся следующие элементы:
сопротивление, емкость и индуктивность,
характеризуемые одноименными
параметрами ![]() ,
, ![]() ,
, ![]() .
В эквивалентных схемах эти элементы
обозначают в соответствии с рис. 1,а.
.
В эквивалентных схемах эти элементы
обозначают в соответствии с рис. 1,а.
Компонентные уравнения простых двухполюсников:
для сопротивления (закон Ома):

(3)
для емкости:

(4)
для индуктивности:

(5)
где
 —
напряжение (точнее, падение напряжения
на двухполюснике);
—
напряжение (точнее, падение напряжения
на двухполюснике);  —
ток.
—
ток.
Эти
модели лежат в основе моделей других
возможных более сложных компонентов.
Большая сложность может определяться
нелинейностью уравнений (3) — (5) (т.е.
зависимостью ![]() ,
, ![]() ,
, ![]() от
фазовых переменных), или учетом
зависимостей параметров
от
фазовых переменных), или учетом
зависимостей параметров ![]() ,
, ![]() ,
, ![]() от
температуры, или наличием более двух
полюсов. Однако многополюсные компоненты
могут быть сведены к совокупности
взаимосвязанных простых элементов.
от
температуры, или наличием более двух
полюсов. Однако многополюсные компоненты
могут быть сведены к совокупности
взаимосвязанных простых элементов.
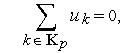
Топологические уравнения выражают законы Кирхгофа для напряжений (ЗНК) и токов (ЗТК). Согласно ЗНК, сумма напряжений на компонентах вдоль любого замкнутого контура в эквивалентной схеме равна нулю, а в соответствии с ЗТК сумма токов в любом замкнутом сечении эквивалентной схемы равна нулю:
|
|
(6) |
|
|
(7) |
где: ![]() —
множество номеров элементов
—
множество номеров элементов ![]() -го
контура;
-го
контура; ![]() —
множество номеров элементов, входящих
в
—
множество номеров элементов, входящих
в ![]() -е
сечение.
-е
сечение.
|
|
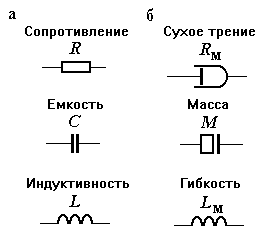
Рис. 1. Компоненты электрических и механических систем
Пример 1
Примером
ММ сложного компонента может служить
модель транзистора. На рис. 2 представлена
эквивалентная схема биполярного
транзистора, на которой зависимые от
напряжений источники тока ![]() и
и ![]() отображают
статические вольтамперные характеристики
p-n переходов,
отображают
статические вольтамперные характеристики
p-n переходов, ![]() и
и ![]() —
тепловые токи переходов,
—
тепловые токи переходов, ![]() —
температурный потенциал,
—
температурный потенциал, ![]() и
и ![]() —
напряжения на эмиттерном и коллекторном
переходах,
—
напряжения на эмиттерном и коллекторном
переходах, ![]() и
и ![]() —
емкости переходов,
—
емкости переходов, ![]() и
и ![]() —
сопротивления утечки переходов,
—
сопротивления утечки переходов, ![]() и
и ![]() —
объемные сопротивления тел базы и
коллектора,
—
объемные сопротивления тел базы и
коллектора, ![]() —
источник тока, моделирующий усилительные
свойства транзистора,
—
источник тока, моделирующий усилительные
свойства транзистора, ![]() и
и ![]() —
прямой и инверсный коэффициенты усиления
тока базы. Здесь
—
прямой и инверсный коэффициенты усиления
тока базы. Здесь ![]() —
фазовые переменные, а остальные величины
— параметры модели транзистора.
—
фазовые переменные, а остальные величины
— параметры модели транзистора.
|
|

Рис. 2. Эквивалентная схема биполярного транзистора
Механические системы
Фазовыми переменными в механических поступательных системах являются силы и скорости. Используют одну из двух возможных электромеханических аналогий. В дальнейшем будем использовать ту из них, в которой скорость относят к фазовым переменным типа потенциала, а силу считают фазовой переменной типа потока. Учитывая формальный характер подобных аналогий, в равной мере можно применять и противоположную терминологию.
Компонентное уравнение, характеризующее инерционные свойства тел, в силу второго закона Ньютона имеет вид:
|
|
(8) |
где ![]() —
сила;
—
сила; ![]() —
масса;
—
масса; ![]() —
поступательная скорость.
—
поступательная скорость.
Упругие свойства тел описываются компонентным уравнением, которое можно получить из уравнения закона Гука. В одномерном случае (если рассматриваются продольные деформации упругого стержня):
|
|
(9) |
где ![]() —
механическое напряжение;
—
механическое напряжение; ![]() —
модуль упругости;
—
модуль упругости; ![]() —
относительная деформация;
—
относительная деформация; ![]() —
изменение длины
—
изменение длины ![]() упругого
тела под воздействием
упругого
тела под воздействием ![]() .
Учитывая, что
.
Учитывая, что ![]() ,
где
,
где ![]() —
сила,
—
сила, ![]() —
площадь поперечного сечения тела, и
дифференцируя (9), имеем:
—
площадь поперечного сечения тела, и
дифференцируя (9), имеем:
![]() или
или
|
|
(10) |
где ![]() —
жесткость (величину, обратную жесткости,
называют гибкостью
—
жесткость (величину, обратную жесткости,
называют гибкостью ![]() ),
), ![]() —
скорость.
—
скорость.
Диссипативные свойства в механических системах твердых тел выражаются соотношениями, характеризующими связь между силой трения и скоростью взаимного перемещения трущихся тел, причем в этих соотношениях производные сил или скоростей не фигурируют, как и в случае описания с помощью закона Ома диссипативных свойств в электрических системах.
Топологические уравнения характеризуют, во-первых, закон равновесия сил: сумма сил, приложенных к телу, включая силу инерции, равна нулю (принцип Даламбера), во-вторых, закон скоростей, согласно которому сумма относительной, переносной и абсолютной скоростей равна нулю.
В механических вращательных системах справедливы компонентные и топологические уравнения поступательных систем с заменой поступательных скоростей на угловые, сил — на вращательные моменты, масс — на моменты инерции, жесткостей — на вращательные жесткости.
Условные обозначения простых элементов механической системы показаны на рис. 1,б.
Нетрудно
заметить наличие аналогий между
электрической и механической системами.
Так, токам и напряжениям в первой из них
соответствуют силы (либо моменты) и
скорости механической системы,
компонентным уравнениям (4) и (5) и
фигурирующим в них параметрам ![]() и
и ![]() —
уравнения (8) и (10) и параметры
—
уравнения (8) и (10) и параметры ![]() и
и ![]() ,
очевидна аналогия и между топологическими
уравнениями. Далее параметры
,
очевидна аналогия и между топологическими
уравнениями. Далее параметры ![]() и
и ![]() будем
называть емкостными (емкостного типа),
параметры
будем
называть емкостными (емкостного типа),
параметры ![]() и
и ![]() —
индуктивными (индуктивного типа), а
параметры
—
индуктивными (индуктивного типа), а
параметры ![]() и
и ![]() —
резистивными (резистивного типа).
—
резистивными (резистивного типа).
Имеется и существенное отличие в моделировании электрических и механических систем: первые из них одномерны, а процессы во вторых часто приходится рассматривать в двух- (2D) или трехмерном (3D) пространстве. Следовательно, при моделировании механических систем в общем случае в пространстве 3D нужно использовать векторное представление фазовых переменных, каждая из которых имеет шесть составляющих, соответствующих шести степеням свободы.
Однако отмеченные выше аналогии остаются справедливыми, если их относить к проекциям сил и скоростей на каждую пространственную ось, а при графическом представлении моделей использовать шесть эквивалентных схем — три для поступательных составляющих и три для вращательных.
Гидравлические системы
Фазовыми переменными в гидравлических системах являются расходы и давления. Как и в предыдущем случае, компонентные уравнения описывают свойства жидкости рассеивать или накапливать энергию.
Рассмотрим
компонентные уравнения для жидкости
на линейном участке трубопровода
длиной ![]() и
воспользуемся уравнением Навье-Стокса
в следующей его форме (для ламинарного
течения жидкости):
и
воспользуемся уравнением Навье-Стокса
в следующей его форме (для ламинарного
течения жидкости):
![]() где
где ![]() —
плотность жидкости;
—
плотность жидкости; ![]() —
скорость;
—
скорость; ![]() —
давление;
—
давление; ![]() —
коэффициент линеаризованного вязкого
трения. Так как
—
коэффициент линеаризованного вязкого
трения. Так как ![]() ,
где
,
где ![]() —
объемный расход;
—
объемный расход; ![]() —
площадь поперечного сечения трубопровода,
то, заменяя пространственную производную
отношением конечных разностей,
имеем:
—
площадь поперечного сечения трубопровода,
то, заменяя пространственную производную
отношением конечных разностей,
имеем:
![]() или
или
|
|
(11) |
Здесь ![]() —
падение давления на рассматриваемом
участке трубопровода;
—
падение давления на рассматриваемом
участке трубопровода; ![]() —
гидравлическая индуктивность, отражающая
инерционные свойства жидкости;
—
гидравлическая индуктивность, отражающая
инерционные свойства жидкости; ![]() —
гидравлическое сопротивление, отражающее
вязкое трение.
—
гидравлическое сопротивление, отражающее
вязкое трение.
Примечание 1
В
трубопроводе круглого сечения
радиусом ![]() удобно
использовать выражение для гидравлического
сопротивления при ламинарном течении:
удобно
использовать выражение для гидравлического
сопротивления при ламинарном течении: ![]() ,
где
,
где ![]() —
кинематическая вязкость; в случае
турбулентного характера течения жидкости
компонентное уравнение для вязкого
трения имеет вид
—
кинематическая вязкость; в случае
турбулентного характера течения жидкости
компонентное уравнение для вязкого
трения имеет вид ![]() при
при  .
.
Интерпретация уравнения (11) приводит к эквивалентной схеме, показанной на рис. 3.
|
|
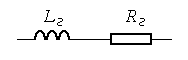
Рис. 3. Эквивалентная схема трубопровода
Явление сжимаемости жидкости описывается компонентным уравнением, вытекающим из закона Гука:
|
|
(12) |
Дифференцируя
(12) и учитывая, что объемный расход ![]() связан
со скоростью
связан
со скоростью ![]() соотношением
соотношением ![]() ,
получаем:
,
получаем:![]() где
где ![]() —
гидравлическая емкость.
—
гидравлическая емкость.
Связь подсистем различной физической природы
Используют
следующие способы моделирования
взаимосвязей подсистем: с
помощью трансформаторной
связи,гираторной
связи и
с помощью зависимости параметров
компонентов одной подсистемы от фазовых
переменных другой. В эквивалентных
схемах трансформаторные и гираторные
связи представлены зависимыми источниками
фазовых переменных, показанными на
рис. 4. На этом рисунке ![]() —
коэффициент трансформации;
—
коэффициент трансформации; ![]() —
передаточная проводимость;
—
передаточная проводимость; ![]() и
и ![]() —
фазовые переменные в
—
фазовые переменные в ![]() -й
цепи;
-й
цепи; ![]() соответствует
первичной, а
соответствует
первичной, а ![]() —
вторичной цепи.
—
вторичной цепи.
|
|
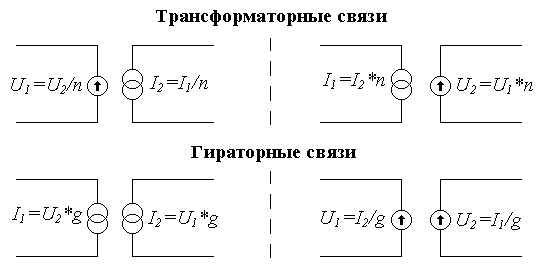
Рис. 4. Трансформаторные и гираторные связи
Примечание 2
Следует отметить, что рассмотренные аналогии фазовых переменных, топологических и компонентных уравнений разных физических систем нашли свое отражение в международном стандарте VHDL-AMS, в котором фазовые переменные типа потенциала названы переменными across quantity, а переменные типа потока — through quantity.
![]()