

книги / Особенности получения наноструктурированных ионно-плазменных плёнок с заданными свойствами
..pdfФормирование ИПП происходит постадийно: образование зародыша, островковый рост, соударение адатомов и объединение островков, формирование поликристаллических островков и каналов, развитие непрерывной структуры, рост пленки (рис. 4). В процессе срастания островков образуется большая движущая сила для огрубления зерен при поверхностной диффузии атома и движения границ зерна. Необходимыми факторами для развития микроструктуры являются поверхностная и объемная диффузия. На них главным образом оказывает влияние температура подложки и ионная бомбардировка, которые могут быть использованы для увеличения подвижности адатомов.
Рис. 4. Схематичная диаграмма осаждения однокомпонентных ИПП, иллюстрирующая фундаментальный процесс ее формирования [111, 112]
Ранее были созданы эмпирические модели структурных зон [113] (рис. 5). Существуют три зоны, в соответствии с которыми постепенно происходят переходы в зависимости от отношения Тп/Тпл (Тп – температура подложки и Тпл – температура плавле-
31
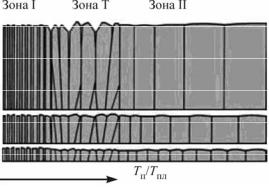
ния материала пленки). Зона I относится к очень низким температурам осаждения, при которых диффузия адатома незначительна. В зоне Т поверхностная диффузия становится значительной, в то время как зона II иллюстрирует рост пленки при температурах осаждения, при которых действуют как поверхностная, так и объемная диффузия.
Рис. 5. Модели структурных зон, схематически представляющие развитие микроструктуры однокомпонентных пленок [99, 114]
Приведенные примеры описания процесса формирования и структурообразования однокомпонентных ИПП не могут быть использованы для разработки и получения ИПП сложного элементного состава, способных работать в экстремальных условиях. Практическое значение будет иметь установление корреляционной связи между технологическими условиями формирования ионно-плазменных пленок и процессом их структурообразования.
32
7. ПОЛУЧЕНИЕ НАНОСТРУКТУРИРОВАННЫХ ПЛЕНОК ZrN МЕТОДАМИ ЭЛЕКТРОДУГОВОГО ИСПАРЕНИЯ И МАГНЕТРОННОГО РАСПЫЛЕНИЯ
Эксплуатационная стойкость большинства деталей машин, технологического инструмента и пар трения, испытывающих воздействие динамических, знакопеременных нагрузок и агрессивной среды, в значительной степени определяется их поверхностными свойствами. В настоящее время для улучшения последних используется широкий арсенал различных комбинированных методов осаждения функциональных пленок, в том числе основанных на модернизации промышленного вакуумного оборудования. Создание и исследование прогрессивных материалов функциональных пленок, в частности многослойных упрочняющих и защитных пленок с переменной твердостью, позволяющих максимально увеличить работоспособность изделий различного назначения, является актуальной и научно обоснованной задачей.
Основные задачи покрытий: получение в течение одного технологического цикла экономичных многофункциональных пленок со стабильными эксплуатационными характеристиками
имультислоями переменной твердости за счет модернизации
ипоследующей автоматизации промышленной вакуумной установки электродугового испарения; диагностика технологического процесса – установление зависимостей температуры поверхности конденсации и микротвердости пленок на основе ZrN от технологических параметров электродугового испарения и магнетронного распыления; оптимизация технологических процессов получения пленок на основе ZrN при одновременном применении электродугового испарения и магнетронного распыления.
33
7.1. Модернизация промышленной вакуумной установки электродугового испарения УРМ 3.279.048
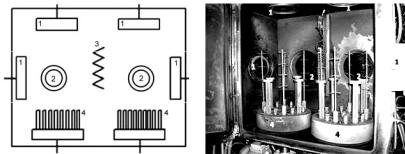
Основные конструктивные и технические работы по модернизации установки электродугового испарения УРМ 3.279.048 (далее – установки): разработка проекта, изготовление и установка в вакуумную камеру четырех несбалансированных магнетронов и резистивного нагревателя (рис. 6, табл. 1); усовершенствование существующих источников высокого и опорного (смещения) напряжения на подложке, конструкции подложкодержателя.
а б
Рис. 6. Модернизированная установка УРМЗ 3.279.048: а – принципиальная схема; б – внешний вид установки: 1 – магнетроны, 2 – дуговые испарители, 3 – резистивный нагреватель, 4 – планетарный механизм
Таблица 1 Основные параметры и характеристики установки
№ |
Наименование основных параметров |
Значение |
|
п/п |
и характеристик |
||
|
|||
1 |
Номинальная мощность, кВт, не более |
55 |
|
2 |
Количество дуговых испарителей, шт. |
2 |
|
3 |
Максимальный ток дуговых испарителей, А |
120 |
|
4 |
Размещение дуговых испарителей в вакуумной ка- |
На боковой |
|
|
мере |
стенке |
34
Окончание табл. 1
№ |
Наименование основных параметров |
Значение |
|
п/п |
и характеристик |
||
|
|||
5 |
Количество стандартных магнетронов |
2 |
|
6 |
Размещение стандартных магнетронов в вакуум- |
На верхней |
|
|
ной камере |
стенке |
|
7 |
Количество несбалансированных магнетронов |
2 |
|
8 |
Размещение несбалансированных магнетронов |
На боковой |
|
|
в вакуумной камере |
стенке |
|
9 |
Мощность резистивного нагревателя, кВт |
3 |
|
10 |
Размеры рабочего пространства (вакуумной каме- |
|
|
|
ры), мм: |
|
|
|
ширина |
500 |
|
|
длина |
400 |
|
|
высота |
600 |
|
11 |
Количество планетарных механизмов и мест для |
2/15 |
|
|
крепления подложек |
|
|
12 |
Длительность цикла, ч |
2 |
|
13 |
Скорость осаждения покрытия (нитрида титана), |
От 2 до 20 |
|
|
мкм/ч |
|
|
14 |
Максимальный ток источника питания подложки, |
6 |
|
|
А |
|
|
15 |
Диапазон плавного регулирования величины на- |
0–1000 |
|
|
пряжения высоковольтного источника питания |
|
|
|
подложки, В |
|
|
16 |
Диапазон плавного регулирования величины на- |
0–500 |
|
|
пряжения низковольтного источника питания под- |
|
|
|
ложки, В |
|
|
17 |
Остаточное давление в камере, Па |
1,33·10–3 |
Технические характеристики новых и модернизированных функциональных узлов:
Несбалансированный магнетрон (рис. 7):
•диаметр мишени 125 мм,
•величина магнитной индукции на поверхности мишени
0,03–0,1 Тл,
35
•рабочий ток магнетрона 3–6 А,
•рабочее напряжение 300–700 В,
•возможность работы в среде реактивных газов азота, кислорода, азота и др.
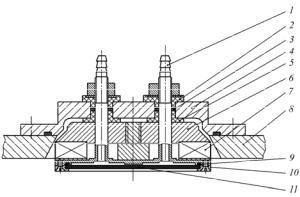
Рис. 7. Сборочный чертеж несбалансированного магнетрона: 1 – ввод охлаждения; 2, 4 – изолирующая втулка; 3, 9 – прокладка, 5 – фланец; 6 – магнитопровод; 7 – магниты NeFeB; 8 – вакуумная камера; 10 – прижимная планка; 11 – мишень
Особенность магнитной системы магнетрона состоит в том, что она создает над поверхностью мишени не только арочное магнитное поле, но и дополнительное поле, которое «выталкивается» от мишени и способствует дополнительной ионизации распыленных частиц. Магнитная система включает в себя магнитопровод, постоянные магниты NeFeB, центральный и боковой полюсные наконечники. Вводы охлаждения служат элементами крепления магнитной системы и катода к фланцу вакуумной системы. Изоляцию и вакуумное уплотнение осуществляют с помощью втулок из фторопласта и прокладки из вакуумной резины. По данным вводам к магнетрону подают питающее напряжение.
Известно [115], что использование плоского катодамишени и кольцевого анода позволяет достичь высоких плотно-
36
стей разрядного тока и высоких скоростей осаждения, слабого воздействия вторичных электронов на подложку. Неравномерность электрического и магнитного полей и, соответственно, плотности разрядного тока (искривление разряда) приводят к тому, что распылению в основном подвергается узкая кольцеобразная область мишени [116].
Источник питания магнетрона. Четыре одинаковых блока питания магнетронов расположены в стойке питания магнетронов, блок управления магнетронов – в стойке управления. Блок питания и блок управления магнетрона будем называть источником питания магнетрона (рис. 8).
Рис. 8. Схема блока питания магнетрона
37
Характеристики источника питания магнетрона:
•напряжение питания магнетрона 300–700 В,
•рабочий ток 3–6 А,
•питающая сеть 3×380 В, 50 Гц,
•мощность, потребляемая от сети, не более 4 кВт. Трехфазное напряжение подают на трансформаторы TV1,
TV2, TV3. Управление выходной мощностью осуществляют ступенчато с помощью коммутации первичных обмоток трансформаторов реле Р1–Р4. Первичные обмотки подключены по схеме «звезда», а вторичные обмотки – по схеме «треугольник». Выпрямленное диодами VD1–VD2 напряжение через балансный резистор R2 подают на магнетрон. Контроль тока осуществляют с помощью шунта R1, контроль напряжения – с помощью делителя R3–R8. Переключатель реле Р1–Р4, амперметр и вольтметр расположены в блоке управления.
Для предотвращения возникновения на мишени микродуг, защиты от короткого замыкания и стабилизации тока разряда применены трансформаторы с большой индуктивностью рассеивания.
Блок питания подложки выполнен по схеме, аналогичной блокам питания магнетронов. Отличие состоит в том, что предусмотрены два диапазона и плавная регулировка напряжения на подложке (см. табл. 1). Кроме того, возможно кратковременное (продолжительностью 20 мс) отключение блока питания при возникновении микродуг на подложке.
Блоки питания и управления испарителями и резистивным нагревателем. Блоки питания испарителей и нагревателя расположены в стойке питания нагревателя и испарителей, блоки их управления – в стойке управления, и не имеют особенностей.
Управление блоками питания магнетронов, дуговых испарителей, подложки и нагревателя осуществляют как с помощью переключателей на блоке управления (ручной режим), так и дистанционно с ЭВМ через сетевой интерфейс RS-485.
38
7.2. Автоматизация модернизированной вакуумной установки УРМЗ 3.279.048 электродугового испарения и магнетронного распыления
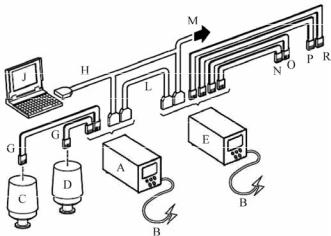
Схема автоматической цифровой многоканальной системы измерения и поддержания давления в вакуумной камере (рис. 9).
Рис. 9. Автоматическая цифровая многоканальная система измерения и поддержания давления в вакуумной камере: А – электронный блок вакуумметра; B – провод питания 220 В; С – термопарная лампа; D – ионизационная лампа; E – электронный блок натекателя; G – сигнальные кабели; H – кабель обмена данными с IBM; J – IBM; L – кабель обмена данными между блоками; M – кабель для подключения дополнительных устройств в сеть; N, O – вход рабочих газов; P, R – выход
рабочих газов
Система включает в себя цифровой ионизационно-термо- парный вакуумметр с непрерывным диапазоном измерения давления и автоматической дегазацией датчиков, цифровой натекатель газа, содержащий два встроенных прецизионных регулятора расхода газа с теплометрическими измерителями расхода газа.
39
Вакуумметр работает с термопарными преобразователями ПМТ-2, ПМТ-4М и ионизационными преобразователями ПМИ-2, ПМИ-51, ПМИ-10-2.
Натекатель имеет 2 режима работы: поддержание давления в вакуумной камере и пропорции газов, поддержание заданного расхода газов по 2 каналам.
Управление приборами системы возможно как с клавиатуры на корпусе (автономно), так и дистанционно с ЭВМ через сетевой интерфейс RS-485.
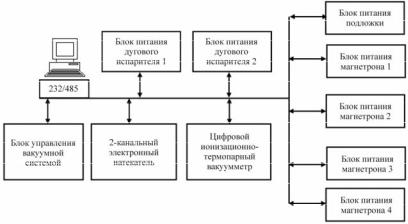
Структурная схема автоматизированной системы управления установкой и типовая схема вакуумной системы представлены на рис. 10 и 11.
Рис. 10. Структурная схема автоматизированной системы управления установкой
Основные режимы работы установки: ручное управление и автоматическое управление.
40