

книги / Практическое моделирование электротехнических систем и систем автоматики
..pdfментах. После 0,4 с работы двигателя частота питания источника становится равной нулю, в результате чего его скорость снижается в режиме свободного выбега. В интервале времени от 0,8 до 1,2 с частота источника питания становится равной 40 Гц, при этом скорость двигателя скачкообразно возрастает и переходит в колебательный режим с небольшим затуханием. Одновременно возрастает динамика момента двигателя и тока в его обмотках. В интервале времени от 1,2 до 1,8 с частота источника питания становится равной 60 Гц, в результате этого происходит новый скачок скорости с постепенным затуханием динамики всех остальных контролируемых параметров.
Измените на обратную последовательность подключения источников питанияв этойсхеме. Сравнитеполученный результат.
Приступим к исследованию пусковых режимов трехфазного электродвигателя переменного тока с фазным ротором. Для этого задачу исследования сформулируем следующим образом.
Задача: составить SPS-модель для исследования пусковых характеристик трехфазного электродвигателя переменного тока с фазным ротором при постоянном моменте сопротивления TL на его m-входе и при переменном значении сопротивле-
ния его роторной обмотки. Схема такой модели показана на рис. 109.
В составе этой модели трехфазный электродвигатель переменного тока с фазным ротором может быть представлен элемен-
том Asynchronous Machine pu Units в варианте No (Present model). В этом варианте выбранный элемент сохраняет для моделирования роторные выводы a, b, c, предназначенные для подключения к нему внешних нагрузочных сопротивлений.
В качестве нагрузочных сопротивлений роторной обмотки АС двигателя принимаются элементы Three-Phase RLC Branch, которые переводятся в вариант R со следующими значениями: R1 = 10 Ом, R2 = 20 Ом, R3 = 40 Ом. Элементе Demux устанавливается на 21 выход, из которых 4-й и 5-й выходы (токи якоря) через элемент Mux подключаются к первому каналу регистра-
111
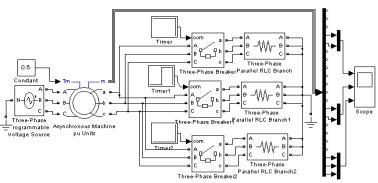
тора Scope. Выходы 13 и 14 (токи статора) аналогично подключаются ко второму каналу регистратора. Последние три выхода (скорость, момент и угол) должны быть подключены к 3-му входу регистратора. Таймеры, управляющие последовательностью включения элементов Three-Phase Breaker, должны быть установлены на следующие параметры: для таймера 1 (Time
[0 0,5], Amplitude [1 0]), для таймера 2 (Time [0 0,5 1], Amplitude [0 1 0]), для таймера 3 (Time [0 1], Amplitude [0 1]).
Рис. 109. Схема модели подключения АC двигателя с фазным ротором и постоянным моментом сопротивления к регуляторам фазной нагрузки
После запуска готовой модели в работу осциллограммы регистратора должны соответствовать рис. 110. Анализ скоростной характеристики этого эксперимента показывает, что при каждом скачке сопротивления роторной обмотки скорость ротора нелинейно снижается. В это же время скачкообразно снижается амплитуда движущего момента. Частота тока в статоре и роторе возрастает на каждой ступени изменения сопротивления.
Характер этого процесса меняется противоположно при ступенчатом снижении сопротивления роторной цепи. Это подтверждается набором осциллограмм, представленных на рис. 111, полученных при пуске модели в обратной последовательности смены нагрузочных сопротивлений.
112
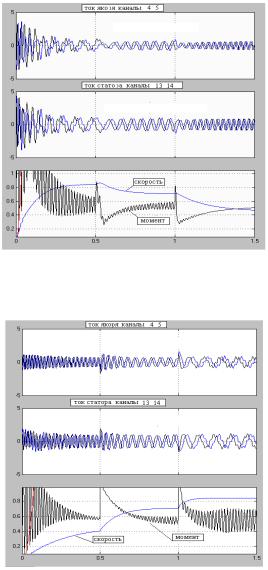
Рис. 110. Характер изменения пусковых параметров на m-выходе АC двигателя с фазным ротором при дискретном росте роторного сопротивления
Рис. 111. Характер изменения пусковых параметров на m-выходе АC двигателя с фазным ротором при дискретном снижении роторного сопротивления
113
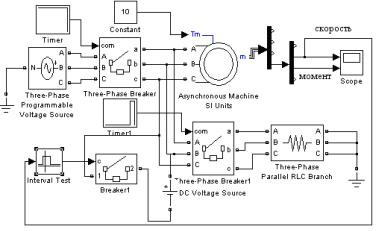
Задача: составить SPS-модель для исследования характеристик трехфазного короткозамкнутого электродвигателя переменного тока, работающего после пуска в режиме динамического торможения за счет включения в статорную обмотку нагрузочного сопротивления. При достижении заданного значения скорости режим торможения меняется. При этом статорная обмотка отключается от сопротивления и подключения к источнику постоянного напряжения. Этот процесс продолжается до полной остановки якоря. Схема такой модели показана на рис. 112.
Рис. 112. Схема модели АC двигателя в режиме разгона и динамического торможения
Как и прежде, разгон двигателя до установившейся скорости выполняется подключением его через элемент Three-Phase Breaker к источнику переменного напряжения Three-Phase Programmable Voltage Source с номиналом 460 В. Время разго-
на и работы двигателя при установившемся значении скорости задается элементом Timer, который в этом случае должен подключать его к источнику питания на 5 с. После этого другим элементом Three-Phase Breaker к статорной обмотке двигателя
114
элементом Timer1 подключается нагрузочное сопротивление (Three-Phase RLC Branch) с номиналом R = 10 Ом. В результате этого за счет ЭДС инерционно вращающегося якоря будет создаваться момент сопротивления, нелинейно снижающий скорость вращения якоря. Если этот процесс не ограничить, то после снижения ЭДС до нуля моментом сопротивления на валу якоря (имитируемым элементом Constant) двигатель будет равномерно вращаться уже в отрицательной области.
Для полной остановки двигателя подключаем его статорные обмотки к источнику постоянного напряжения. Для этой цели в модель вводится элемент Interval Test, который на нулевом уровне скорости вращения ротора двигателя через элемент Breaker1 (однофазный выключатель) подключает две фазы статорной обмотки двигателя к источнику постоянного напряжения (DC Voltage Source) с номиналом 50 В. При этом на роторе создается останавливающий тормозной момент.
В окне установки параметров для элемента Interval Test, который находятся в разделе Logic and Bit Operations библиотеки Simulink, нужно установить пределы управления скоростью от 0 до –10 рад/с. В этом диапазоне скорости происходит подключение элемента DC Voltage Source к статорной обмотке двигателя, в результате этого скорость якоря колебательно снижается до нуля. Характер изменения скорости и момента на валу АC двигателя в момент разгона и динамического торможения показан на рис. 113.
Анализ результата этого эксперимента показывает, что в начальный момент разгона двигателя его пусковой момент совершает значительные колебания по амплитуде. Этот процесс вызывает соответствующие колебания пусковой скорости, которые затухают по мере снижения амплитуды колебания пускового момента.
На участке установившегося движения колебания момента на валу двигателя снижаются до нуля. Очередной всплеск амплитуды момента наблюдается во время отключения двигателя
115
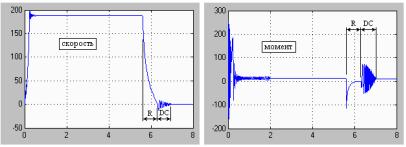
от источника питания и соответствующего подключения нагрузочного сопротивления в его статорную обмотку. При этом скорость вращения вала двигателя (на участке R) нелинейно снижается до отрицательного значения. Пропорционально этому снижается до нуля и момент.
Рис. 113. Характер изменения скорости и момента на валу АC двигателя в момент разгона и динамического торможения
При нулевом значении скорости статорная обмотка двигателя подключается к источнику постоянного напряжения, в результате чего возникает колебательный процесс как момента на валу двигателя, так и скорости вращения ротора. Этот процесс постепенно затухает.
Задача: составить SPS-модель для исследования характеристик трехфазного короткозамкнутого электродвигателя переменного тока, работающего после пуска в режиме свободного выбега. Процесс свободного выбега сохраняется до нулевого значения скорости. Под действием момента сопротивления скорость ротора может перейти в отрицательную область. Для остановки ротора на уровне нулевого значения скорости необходимо в этот момент обнулить тормозной момент со-
противления. Схема такой модели показана на рис. 114.
Ввод в структуру этой модели элементов Three-Phase Breaker, Three-Phase Programmable Voltage и Asynchronous
116
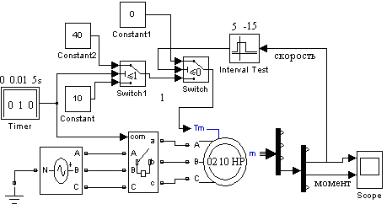
Machine pu Units не отличается от процесса построения вышеописанных моделей. Разница состоит только в схеме управления моментом сопротивления на роторе исследуемого двигателя. В этой модели на вход Tm двигателя сигнал подается с двух последовательно соединенных элементов Switch, выполняющих роль элементов ветвления. Первый из этих элементов управляется таймером по условию (<1), а второй элемент Switch управляется блоком Interval Test, который выдает единичный сигнал управления на этот элемент только в том случае, если скорость ротора будет находиться в пределах значений от 5 до –15. Процесс работы модели в режиме запуска и работы двигателя до установившейся скорости контролируется таймером, который сначала запускает двигатель в течение 0,01 с и затем выдерживает его установившийся режим скорости в течение 5 с. После этого таймер отключает двигатель от источника питания. Процесс торможения двигателя управляется элементом Interval Test, который через элемент Constant1 подает на вход Tm двигателя тормозной момент в том случае, когда скорость ротора будет находиться в пределах значений от 5 до –15.
Рис. 114. Схема модели пуска и торможения АC двигателя в режиме свободного выбега
117

Принцип работы этой модели следующий. После запуска модели ротор двигателя работает в течение 5 с. При этом момент сопротивления на входе Tm двигателя задается элементом Constant2 (40). По истечении этого времени двигатель отключаются от источника питания, после чего момент сопротивления на входе Tm двигателя задается уже элементом Constant (10). Передача этого момента происходит через элементы Switch1 и Switch. При этом оба из них находятся в нулевом состоянии. В этом режиме торможения скорость ротора двигателя линейно снижается до области отрицательных значений. До тех пор пока скорость ротора будет выше пороговых значений, установленных для срабатывания элемента Interval Test, на его выходе будет нулевой сигнал.
Элемент Interval Test выдает единичный сигнал только тогда, когда скорость ротора будет находиться в пределах значений от 5 до –15. При этом элемент Switch подключает на вход Tm двигателя элемент Constant1(0), обнуляя тем самым момент сопротивления на этом входе.
После запуска модели в работу характер изменения скорости и момента на валу АC двигателя в момент разгона и торможения свободным выбегом показан на рис. 115.
Рис. 115. Характер изменения скорости и момента на валу АC двигателя в режиме разгона и торможения свободным выбегом
118
Продолжительность запуска и характер торможения зависят от значений соответствующего момента сопротивления на входе Tm двигателя.
Мы рассмотрели только несколько типовых задач исследования характеристик электротехнических систем на моделях, составленных с помощью программного пакета МАТLAB и его библиотек (Simulink, SimPowerSystems). На основе этих моделей могут быть составлены другие подобные модели для решения задач более углубленных исследований характеристик электротехнических систем и систем автоматики.
Используя рассмотренные примеры исследования характеристик электротехнических систем, студент должен выполнить исследования характеристик конкретной электротехнической системы совместно с системой автоматики в соответствии с полученным заданием.
119
ЗАДАНИЯ НА ВЫПОЛНЕНИЕ ИССЛЕДОВАНИЙ ХАРАКТЕРИСТИК ЭЛЕКТРОТЕХНИЧЕСКИХ СИСТЕМ И СИСТЕМ АВТОМАТИКИ
ЗАДАНИЕ № 1
Составить и исследовать модель последовательного пуска, движения и механического торможения двух электровозных составов, состоящих их четырех вагонеток разной грузоподъемности. Движение каждого электровозного состава начинается с разницей в 2 с и продолжается в течение 8 с, после чего на привод электровоза накладывается механический тормоз. Движение каждого из вагонов состава начинается последовательно через 0,1 с, при этом момент на приводе электровоза ступенчато возрастает.
В состав модели входят:
–источник переменного напряжения 220 В;
–выпрямитель;
–два двигателя постоянного тока с последовательным возбуждением и напряжением 300/150 В;
–остальныеэлементывыбираютсяпоусмотрениюстудента. Необходимо исследовать:
–ток и напряжение контактной сети в процессе всего цикла движения состава;
–скорость и момент на валу каждого двигателя в режимах последовательного пуска, движения и торможения.
Режим работы составов:
–пуск 1-го и через 2 с пуск 2-го;
–движение каждого в течение 8 с;
–торможение каждого состава после 8 с движения.
120