

ответы по физике
.pdfМЕХАНИКА
1. Механическое движение. Траектория движения. Пройденный путь. Скорость движения. Ускорение движения. Тангенциальное ускорение. Нормальное ускорение. Связь между ними.
Механическим движением тела называется изменение его положения в пространстве относительно других тел с течением времени. Траектория движения – это линия, которую описывает тело в результате своего движения. Пройденный путь – это отрезок траектории, пройденный точкой за некоторый промежуток времени. Скорость — характеристика движения точки, при равномерном движении численно равная отношению пройденного пути s к промежутку времени t, за который этот путь пройден
Ускорение движения - производная скорости по времени, векторная величина, показывающая, насколько изменяется вектор скорости точки (тела) при её движении за единицу времени.
Тангенциальное ускорение - Составляющая ускорения, направленная вдоль скорости, Она характеризует изменение скорости по модулю.
Нормальное ускорение - составляющая ускорения, направленная к центру кривизны траектории, т.е. перпендикулярно (нормально) скорости.
Она характеризует изменение скорости по направлению. Здесь R - радиус кривизны траектории в данной точке.
Тангенциальное и нормальное ускорение взаимноперпендикулярны, поэтому модуль полного ускорения
2. Законы Ньютона. Силы в механике: сила всемирного тяготения, сила тяжести, вес тела, сила упругости, сила Архимеда, сила Стокса.
Первый закон Ньютона: Существуют такие системы отсчёта, называемые инерциальными, относительно которых материальная точка при отсутствии внешних воздействий сохраняет величину и направление своей скорости неограниченно долго.
Второй закон Ньютона: В инерциальной системе отсчёта ускорение, которое получает материальная точка, прямо пропорционально равнодействующей всех приложенных к ней сил и обратно пропорционально её массе.
Третий закон Ньютона: Материальные точки попарно действуют друг на друга с силами, имеющими одинаковую природу, направленными вдоль прямой, соединяющей эти точки, равными по модулю и противоположными по направлению:
Гравитация - универсальное фундаментальное взаимодействие между всеми материальными телами. В рамках классической механики гравитационное взаимодействие описывается законом всемирного тяготения Ньютона, который гласит, что сила
гравитационного притяжения между двумя материальными точками массы  и
и  , разделёнными расстоянием
, разделёнными расстоянием  , пропорциональна обеим массам и обратно пропорциональна квадрату расстояния — то есть:
, пропорциональна обеим массам и обратно пропорциональна квадрату расстояния — то есть:
Здесь  — гравитационная постоянная, равная примерно 6,6725×10-11 м³/(кг·с²).
— гравитационная постоянная, равная примерно 6,6725×10-11 м³/(кг·с²).
Сила тяжести - действующая на любую материальную частицу, находящуюся вблизи земной поверхности, сила Р, определяемая как геометрическая сумма силы притяжения Земли F и центробежной (переносной) силы инерции Q учитывающей эффект суточного вращения Земли. Направление С. т. является направлением вертикали в данной точке земной поверхности.
Сила упругости — сила, возникающая при деформации тела и противодействующая этой деформации.
Закон Гука: Сила упругости, возникающая при деформации тела, прямо пропорциональна удлинению тела и направлена противоположно направлению перемещения частиц тела относительно других частиц при деформации.
 ,
,
где  — жёсткость тела,
— жёсткость тела,  — величина деформации
— величина деформации
1

Закон Архимеда формулируется следующим образом: на тело, погружённое в жидкость (или газ), действует выталкивающая сила, равная весу вытесненной этим телом жидкости (или газа)(называемая силой Архимеда)
где  — плотность жидкости (газа),
— плотность жидкости (газа),  — ускорение свободного падения, а
— ускорение свободного падения, а  — объём погружённого тела (или часть объёма тела, находящаяся ниже поверхности). Если тело плавает на поверхности или равномерно движется вверх или вниз, то выталкивающая сила (называемая также архимедовой силой) равна по модулю (и противоположна по направлению) силе тяжести, действовавшей на вытесненный телом объём жидкости (газа), и приложена к центру тяжести этого объёма.
— объём погружённого тела (или часть объёма тела, находящаяся ниже поверхности). Если тело плавает на поверхности или равномерно движется вверх или вниз, то выталкивающая сила (называемая также архимедовой силой) равна по модулю (и противоположна по направлению) силе тяжести, действовавшей на вытесненный телом объём жидкости (газа), и приложена к центру тяжести этого объёма.
Закон Стокса, определяющий силу сопротивления F, испытываемую твёрдым шаром при его медленном поступательном движении
в неограниченной вязкой жидкости:  , где μ — коэффициент вязкости жидкости, r — радиус шара и υ — его скорость. Эта формула выведена Дж. Г. Стоксом в 1851. С. з. справедлив лишь для малых Рейнольдса чисел Re ≤ 1. По С. з. можно определить скорость осаждения мелких капель тумана, коллоидных частиц, частиц ила и других мелких частиц. Предельную скорость υпр падения шарика малых размеров в вязкой жидкости находят по формуле
, где μ — коэффициент вязкости жидкости, r — радиус шара и υ — его скорость. Эта формула выведена Дж. Г. Стоксом в 1851. С. з. справедлив лишь для малых Рейнольдса чисел Re ≤ 1. По С. з. можно определить скорость осаждения мелких капель тумана, коллоидных частиц, частиц ила и других мелких частиц. Предельную скорость υпр падения шарика малых размеров в вязкой жидкости находят по формуле
где ρ’ и ρ— плотность жидкости и вещества шарика, g — ускорение свободного падения.
3. Кинематика движения точки по окружности и вращательного движения твердого тела. Угловая скорость. Угловое ускорение. Связь линейной скорости с угловой и тангенциального ускорения с угловым.
Движение тела по окружности с постоянной по модулю скоростью — это движение, при котором тело за любые равные промежутки времени описывает одинаковые дуги.
Положение тела на окружности определяется радиус-вектором  , проведенным из центра окружности. Модуль радиус-вектора равен радиусу окружности R (рис. 1).
, проведенным из центра окружности. Модуль радиус-вектора равен радиусу окружности R (рис. 1).
Рис. 1
За время t тело, двигаясь из точки А в точку В, совершает перемещение  , равное хорде АВ, и проходит путь, равный длине дуги l.
, равное хорде АВ, и проходит путь, равный длине дуги l.
Радиус-вектор поворачивается на угол φ. Угол выражают в радианах.
Скорость  движения тела по траектории (окружности) направлена по касательной к траектории. Она называется линейной скоростью. Модуль линейной скорости равен отношению длины дуги окружности l к промежутку времени t, за который эта дуга пройдена:
движения тела по траектории (окружности) направлена по касательной к траектории. Она называется линейной скоростью. Модуль линейной скорости равен отношению длины дуги окружности l к промежутку времени t, за который эта дуга пройдена:
Скалярная физическая величина, численно равная отношению угла поворота радиус-вектора к промежутку времени, за который этот поворот произошел, называется угловой скоростью:
В СИ единицей угловой скорости является радиан в секунду (рад/с).
При равномерном движении по окружности угловая скорость и модуль линейной скорости — величины постоянные: ω = const; υ = const.
Положение тела можно определить, если известен модуль радиус-вектора  и угол φ, который он составляет с осью Ox (угловая координата). Если в начальный момент времени t0 = 0 угловая координата равна φ0, а в момент времени t она равна φ, то угол поворота
и угол φ, который он составляет с осью Ox (угловая координата). Если в начальный момент времени t0 = 0 угловая координата равна φ0, а в момент времени t она равна φ, то угол поворота
φ радиуса-вектора за время  равен
равен  . Тогда из последней формулы можно получить кинематическое уравнение движения материальной точки по окружности:
. Тогда из последней формулы можно получить кинематическое уравнение движения материальной точки по окружности:
2
Оно позволяет определить положение тела в любой момент времени t. Учитывая, что  , получаем:
, получаем:
 — формула связи между линейной и угловой скоростью.
— формула связи между линейной и угловой скоростью.
Промежуток времени Τ, в течение которого тело совершает один полный оборот, называется периодом вращения:
где N — число оборотов, совершенных телом за время t.
За время t = Τ тело проходит путь  . Следовательно,
. Следовательно,
Величина ν, обратная периоду, показывающая, сколько оборотов совершает тело за единицу времени, называется частотой вращения:
Следовательно,
Вращательное движение — вид механического движения. При вращательном движении абсолютно твёрдого тела его точки описывают окружности, расположенные в параллельных плоскостях. Центры всех окружностей лежат при этом на одной прямой, перпендикулярной к плоскостям окружностей и называемой осью вращения. Ось вращения может располагаться внутри тела и за его пределами. Ось вращения в данной системе отсчёта может быть как подвижной, так и неподвижной.
Угловое ускорение — псевдовекторная физическая величина, характеризующая быстроту изменения угловой скорости твёрдого тела.
Вектор углового ускорения  направлен вдоль оси вращения (в сторону
направлен вдоль оси вращения (в сторону  при ускоренном вращении и противоположно
при ускоренном вращении и противоположно  — при замедленном).
— при замедленном).
При вращении вокруг неподвижной точки вектор углового ускорения определяется как первая производная от вектора угловой скорости  по времени, то есть
по времени, то есть
,
Существует связь между тангенциальным и угловым ускорениями:
 ,
,
где R — радиус кривизны траектории точки в данный момент времени. Итак, угловое ускорение равно второй производной от угла
поворота по времени или первой производной от угловой скорости по времени. Угловое ускорение измеряется в рад/с2 .
4.Динамика вращательного движения тел вокруг неподвижной оси: момент силы относительно оси, плечо силы, момент инерции точечного тела и системы тел, основной закон динамики вращательного движения.
Момент силы — векторная физическая величина, равная произведению радиус-вектора, проведенного от оси вращения к точке приложения силы, на вектор этой силы. Характеризует вращательное действие силы на твёрдое тело.
где  — сила, действующая на частицу, а
— сила, действующая на частицу, а  — радиус-вектор частицы.
— радиус-вектор частицы.
Плечо силы- кратчайшее расстояние от данной точки (центра) до линии действия силы.
Момент инерции — скалярная физическая величина, мера инертности во вращательном движении вокруг оси, подобно тому, как масса тела является мерой его инертности в поступательном движении. Характеризуется распределением масс в теле: момент инерции равен сумме произведений элементарных масс на квадрат их расстояний до базового множества (точки, прямой или плоскости).
Единица измерения СИ: кг·м².
Моментом инерции механической системы относительно неподвижной оси («осевой момент инерции») называется величина Ja, равная сумме произведений масс всех n материальных точек системы на квадраты их расстояний до оси:
,
где:
mi — масса i-й точки,
ri — расстояние от i-й точки до оси.
3
Осевой момент инерции тела Ja является мерой инертности тела во вращательном движении вокруг оси подобно тому, как масса тела является мерой его инертности в поступательном движении.
,
где:
 — масса малого элемента объёма тела
— масса малого элемента объёма тела  ,
,
 — плотность,
— плотность,
 — расстояние от элемента
— расстояние от элемента  до оси a.
до оси a.
Если тело однородно, то есть его плотность всюду одинакова, то
Теорема Гюйгенса-Штейнера Основная статья: Теорема Штейнера
Момент инерции твёрдого тела относительно какой-либо оси зависит не только от массы, формы и размеров тела, но также от положения тела по отношению к этой оси. Согласно теореме Штейнера (теореме Гюйгенса-Штейнера), момент инерции тела J относительно произвольной оси равен сумме момента инерции этого тела Jc относительно оси, проходящей через центр масс тела параллельно рассматриваемой оси, и произведения массы тела m на квадрат расстояния d между осями:
Если  — момент инерции тела относительно оси, проходящей через центр масс тела, то момент инерции относительно параллельной оси, расположенной на расстоянии
— момент инерции тела относительно оси, проходящей через центр масс тела, то момент инерции относительно параллельной оси, расположенной на расстоянии  от неё, равен
от неё, равен
 ,
,
где  — полная масса тела.
— полная масса тела.
Например, момент инерции стержня относительно оси, проходящей через его конец, равен:
Основной закон динамики вращения:
Момент вращающей силы, приложенной к телу, равен произведению момента инерции тела на угловое ускорение
5. Импульс тела. Закон сохранения импульса.
Импульс (Количество движения) — векторная физическая величина, характеризующая меру механического движения тела. В классической механике импульс тела равен произведению массы m этого тела на его скорость v, направление импульса совпадает с направлением вектора скорости:
 .
.
Импульс силы — это векторная физическая величина, равная произведению силы на время её действия, мера воздействия силы на тело за данный промежуток времени
Закон сохранения импульса: В замкнутой системе геометрическая сумма импульсов тел остается постоянной при любых взаимодействиях тел этой системы между собой.
Рассмотрим второй закон Ньютона
Перепишем его для системы из N частиц:
где суммирование идет по всем силам, действующим на n-ю частицу со стороны m-ой. Согласно третьему закону Ньютона, силы
вида  и
и  будут равны по абсолютному значению и противоположны по направлению, то есть
будут равны по абсолютному значению и противоположны по направлению, то есть  Тогда после подстановки полученного результата в выражение (1) правая часть будет равна нулю, то есть:
Тогда после подстановки полученного результата в выражение (1) правая часть будет равна нулю, то есть:
4
или
Как известно, если производная от некоторого выражения равна нулю, то это выражение есть постоянная величина относительно переменной дифференцирования, а значит:
(постоянный вектор).
То есть суммарный импульс системы частиц есть величина постоянная. Нетрудно получить аналогичное выражение для одной частицы.
Следует учесть, что вышеприведенные рассуждения справедливы лишь для замкнутой системы.
Также стоит подчеркнуть, что изменение импульса  зависит не только от действующей на тело силы, но и от продолжительности её действия.
зависит не только от действующей на тело силы, но и от продолжительности её действия.
6.Работа силы. Консервативные и неконсервативные силы. Потенциальная энергия. Примеры формул потенциальной энергии взаимодействия тел. Кинетическая энергия поступательного и вращательного движения тел.
Работа силы - это мера действия силы, зависящая от её модуля и направления, а также от перемещения точки приложения силы.
При прямолинейном движении одной материальной точки и постоянном значении приложенной к ней силы работа (этой силы) равна произведению величины проекции вектора силы на направление движения и величины совершённого перемещения.
Здесь точкой обозначено скалярное произведение,  — вектор перемещения; подразумевается, что действующая сила
— вектор перемещения; подразумевается, что действующая сила  постоянна в течение всего того времени, за которое вычисляется работа.
постоянна в течение всего того времени, за которое вычисляется работа.
Консервативные силы (потенциальные силы) — силы, работа которых не зависит от формы траектории (зависит только от начальной и конечной точки приложения сил). Отсюда следует определение: консервативные силы — такие силы, работа которых по любой замкнутой траектории равна 0.
Если в системе действуют только консервативные силы, то механическая энергия системы сохраняется.
Диссипативные силы — силы, при действии которых на механическую систему её полная механическая энергия убывает (то есть диссипирует), переходя в другие, немеханические формы энергии, например, в теплоту. Примерами диссипативных сил являются: силы вязкого или сухого трения и сила трения скольжения.
Потенциальная энергия тела – энергия, обусловленная взаимодействием тел. Потенциальная энергия  в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
в поле тяготения Земли вблизи поверхности приближённо выражается формулой:
где  — масса тела,
— масса тела,  — ускорение свободного падения,
— ускорение свободного падения,  — высота положения центра масс тела над произвольно выбранным нулевым уровнем.
— высота положения центра масс тела над произвольно выбранным нулевым уровнем.
Кинетическая энергия тела – это энергия тела, обусловленная его движением. выделяют кинетическую энергию поступательного и вращательного движения.
Если кинетическая энергия может быть определена для одного отдельного тела, то потенциальная энергия всегда характеризует как минимум два тела или положение тела во внешнем поле.
Кинетическая энергия характеризуется скоростью; потенциальная — взаиморасположением тел. Основной физический смысл имеет не само значение потенциальной энергии, а её изменение.
7.Механическая энергия. Закон сохранения механической энергии. Связь работы неконсервативной силы с изменением механической энергии системы.
Механическая энергия тела – это сумма кинетической энергии тела и потенциальной.
Закон сохранения механической энергии утверждает, что если тело или система подвергается действию только консервативных сил, то полная механическая энергия этого тела или системы остаётся постоянной. В изолированной системе, где действуют только консервативные силы, полная механическая энергия сохраняется.
Изменение полной механической энергии системы равно работе всех внешних сил и внутренних неконсервативных сил.
5

КОЛЕБАНИЯ И ВОЛНЫ.
1.Механические колебания. Смещение, период, частота, амплитуда фаза и циклическая частота колебаний. Гармонические колебания. Уравнение гармонических колебаний. Скорость и ускорение движения при гармонических колебаниях. Связь ускорения со смещением.
Механическими колебаниями называют движения тел, повторяющиеся точно (или приблизительно) через одинаковые промежутки времени.
Смещение — отклонение тела от положения равновесия.
Фаза колебаний — определяет смещение в любой момент времени, то есть определяет состояние колебательной системы. Амплитуда — максимальное отклонение колеблющейся величины от некоторого усреднённого её значения для системы
Период — промежуток времени, через который повторяются какие-либо показатели состояния системы (система совершает одно полное колебание)
Частота — число колебаний в единицу времени В круговых или циклических процессах вместо характеристики «частота» используется понятие круговая (циклическая) частота 
(рад/сек, Гц, сек−1), показывающая число колебаний за  единиц времени:
единиц времени:
Гармоническое колебание — явление периодического изменения какой-либо величины, при котором зависимость от аргумента имеет характер функции синуса или косинуса. Например, гармонически колеблется величина, изменяющаяся во времени следующим образом:
или
 ,
,
где х — значение изменяющейся величины, t — время, остальные параметры — постоянные: А — амплитуда колебаний, ω —
циклическая частота колебаний,  — полная фаза колебаний,
— полная фаза колебаний,  — начальная фаза колебаний. Согласно определению скорости, скорость – это производная от координаты по времени
— начальная фаза колебаний. Согласно определению скорости, скорость – это производная от координаты по времени
Таким образом, мы видим, что скорость при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания скорости опережают колебания смещения по фазе на /2.
Величина  - максимальная скорость колебательного движения (амплитуда колебаний скорости). Согласно определению ускорения, ускорение – это производная от скорости по времени:
- максимальная скорость колебательного движения (амплитуда колебаний скорости). Согласно определению ускорения, ускорение – это производная от скорости по времени:
 -
-
вторая производная от координаты по времени. Тогда: |
. |
Ускорение при гармоническом колебательном движении также изменяется по гармоническому закону, но колебания ускорения опережают колебания скорости на /2 и колебания смещения на (говорят, что колебания происходят в противофазе).
Величина 
- максимальное ускорение (амплитуда колебаний ускорения). Следовательно, для ускорения имеем:
 ,
,
а для случая нулевой начальной фазы:  Сравним выражения для смещения и ускорения при гармонических колебаниях:
Сравним выражения для смещения и ускорения при гармонических колебаниях:
и |
. |
6
Можно записать:  -
-
т.е. вторая производная смещения прямо пропорциональна (с противоположным знаком) смещению. Такое уравнение наз. уравнением гармонического колебания. Эта зависимость выполняется для любого гармонического колебания, независимо от его природы. Поскольку мы нигде не использовали параметров конкретной колебательной системы, то от них может зависеть только циклическая частота.
2. Представление гармонических колебаний в виде вращающегося вектора. Сложение двух гармонических колебаний с одинаковыми частотами, совершающихся в одном направлении. Условия усиления и максимального усиления колебаний.
Условия ослабления и наибольшего ослабления колебаний.
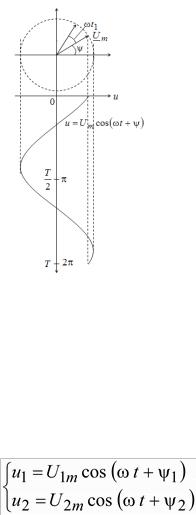
Мгновенное значение функции можно получить как проекцию на горизонтальную ось отрезка длиной Um, вращающегося относительно начала прямоугольной системы координат с угловой частотой ω = 2p×f в положительном направлении (против часовой стрелки) (рис. 2.3).
можно получить как проекцию на горизонтальную ось отрезка длиной Um, вращающегося относительно начала прямоугольной системы координат с угловой частотой ω = 2p×f в положительном направлении (против часовой стрелки) (рис. 2.3).
Вращающийся отрезок будем называть вектором.
Рис. 2.3. Представление синусоиды вращающимся вектором
В момент t = 0 вектор образует с горизонтальной осью угол ψ и его проекция на горизонтальную ось равна Umcos ψ, т.е.
мгновенному значению функции  при t = 0. За время t = t1 вектор повернется на угол ω t1 и окажется
при t = 0. За время t = t1 вектор повернется на угол ω t1 и окажется
повернутым относительно горизонтальной оси на угол ω t1 +y, его проекция на ось будет равна 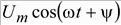 и т.д.
и т.д.
Таким образом, рассмотрение гармонических колебаний можно заменить рассмотрением вращающихся векторов. Для получения мгновенных значений условимся проектировать вектора на горизонтальную ось.
Если гармонические колебания имеют одну и ту же частоту, то соответствующие этим колебаниям векторы вращаются с одинаковой угловой частотой, и поэтому углы между ними сохраняются неизменными.
Зарисуем две гармонические функции
, (2.9)
имеющие одинаковую угловую частоту ω и начальные фазы y1 и y2 (рис. 2.4).
7
Рис. 2.4. Векторы напряжений и соответствующие синусоиды
Кривая u1, смещенная влево относительно u2, возрастает от нуля до своего положительного максимума раньше, чем кривая u2. Поэтому говорят, что u1 опережает по фазе u2, или наоборот. Разность начальных фаз φ = y1 – (–y2) называется фазовым сдвигом или углом сдвига u1 относительно u2. Этот угол и образуют векторы, показанные на верхней части рис. 2.4.
При равенстве начальных фаз, т.е. при φ = 0, векторы направлены в одну и ту же сторону, т.е. совпадают по фазе (синфазны). При фазовом сдвиге 180° векторы направлены в диаметрально противоположные стороны (находятся в противофазе).
Диаграмма, изображающая совокупность векторов, построенных с соблюдением их взаимной ориентации по фазе, называется векторной диаграммой.
Векторное представление гармонических функций, частота которых одинакова, облегчает алгебраические операции с ними и дает возможность наглядно представить процессы, происходящие в цепи.
Например, операция сложения
(2.10)
При использовании векторной диаграммы с целью установления фазовых сдвигов или амплитудных значений гармонических величин, имеющих одинаковую частоту, векторная диаграмма может считаться неподвижной. Это равносильно переходу во вращающуюся вместе с векторами систему координат.
Построение векторной диаграммы обычно не связано с определением мгновенных значений гармонических функций. В этом случае они строятся не для амплитуд, а для действующих значений. Кривые мгновенных значений называются временными диаграммами.
Колеблющееся тело может принимать участие в нескольких колебательных процессах, тогда следует найти результирующее колебание, другими словами, колебания необходимо сложить. В данном разделе будем складывать гармонические колебания одного направления и одинаковой частоты
применяя метод вращающегося вектора амплитуды, построим графически векторные диаграммы этих колебаний (рис. 1). Tax как векторы A1 и A2 вращаются с одинаковой угловой скоростью ω0, то разность фаз (φ2 - φ1) между ними будет оставаться постоянной. Значит, уравнение результирующего колебания будет
 (1)
(1)
В формуле (1) амплитуда А и начальная фаза φ соответственно определяются выражениями
 (2)
(2)
Значит, тело, участвуя в двух гармонических колебаниях одного направления и одинаковой частоты, совершает при этом также
8

гармоническое колебание в том же направлении и с той же частотой, что и складываемые колебания. Амплитуда результирующего колебания зависит от разности фаз (φ2 - φ1) складываемых колебаний.
Рис.1
Исследуем выражение (2) в зависимости от разности фаз (φ2 - φ1):
1)φ2 - φ1 = ±2mπ (m = 0, 1, 2, ...), тогда A=A1+A2, т. е. амплитуда результирующего колебания А будет равна сумме амплитуд складываемых колебаний;
2)φ2 - φ1 = ±(2m+1)π (m = 0, 1, 2, ...), тогда A=|A1–A2|, т. е. амплитуда результирующего колебания будет равна разности амплитуд складываемых колебаний.
Амплитуда результирующего колебания максимальна и равна сумме амплитуд слагаемых колебаний: если разность фаз этих колебаний составляет четное число п; если же разность фаз составляет нечетное число п, то амплитуда результирующего колебания минимальна и равна разности амплитуд слагаемых колебаний.
Для практики представляет особый интерес случай, когда два складываемых гармонических колебания одинакового направления мало отличаются по частоте. После сложения этих колебаний получаются колебания с периодически изменяющейся амплитудой. Периодические изменения амплитуды колебания, которые возникают при сложении двух гармонических колебаний с близкими частотами, называются биениями.
Пусть амплитуды складываемых колебаний равны А, а частоты равны ω и ω+Δω, причем Δω<<ω. Выберем начало отсчета так, чтобы начальные фазы обоих колебаний были равны нулю:
Складывая эти выражения и учитывая, что во втором сомножителе Δω/2<<ω, получим
 (3)
(3)
Результирующее колебание (3) можно считать как гармоническое с частотой ω , амплитуда Аσ которого изменяется по следующему периодическому закону:
 (4)
(4)
Частота изменения Аσ в два раза больше частоты изменения косинуса (так как берется по модулю), т. е. частота биений равна разности частот складываемых колебаний:
Период биений
Вид зависимости (3) показан на рис. 2, где сплошные жирные линии представляют график результирующего колебания (3), а огибающие их линии - график медленно меняющейся согласно уравнению (4) амплитуды.
9

Рис.2
Нахождение частоты тона (звука определенной высоты) биений между эталонным и измеряемым колебаниями — наиболее часто используемый на практике метод сравнения измеряемой величины с эталонной. Метод биений применяется для настройки музыкальных инструментов, анализа слуха и т. д.
При исследовании сложного колебательного процесса нужно знать, что любые сложные периодические колебания s=f(t) можно представить в виде суперпозиции (наложения) одновременно совершающихся гармонических колебаний с различными амплитудами, начальными фазами, а также частотами, которые кратны циклической частоте ω0 :
(5)
Представление в виде (5) любой периодической функции связывают с понятием гармонического анализа сложного периодического колебания, или разложения Фурье. Слагаемые ряда Фурье, которые определяют гармонические колебания с частотами ω0, 2ω0, 3ω0, ..., называются первой (или основной), второй, третьей и т. д. гармониками сложного периодического колебания.
3. Квазиупругая сила. Математический и физический маятники. Циклическая частота гармонического осциллятора. Энергия колебаний.
Квазиупругая сила - направленная к центру О сила. модуль которой пропорционален расстоянию r от центра О до точки приложения силы (F=-cr), где с - постоянный коэффициент, численно равный силе, действующей на единице расстояния. К. с. является силой центральной и потенциальной с силовой функцией U=-0,5cr2. Примерами К. с. служат силы упругости, возникающие при малых деформациях упругих . Приближённо квазиупругой силой можно также считать касательную составляющую силы тяжести, действующей на матем маятник при малых его отклонениях от вертикали.
Математический маятник — осциллятор, представляющий собой механическую систему, состоящую из материальной точки, находящейся на невесомой нерастяжимой нити или на невесомом стержне в однородном поле сил тяготения. Период малых собственных колебаний математического маятника длины l неподвижно подвешенного в однородном поле тяжести с ускорением свободного падения g равен
и не зависит от амплитуды и массы маятника.
Физический маятник — осциллятор, представляющий собой твёрдое тело, совершающее колебания в поле каких-либо сил относительно точки, не являющейся центром масс этого тела, или неподвижной оси, перпендикулярной направлению действия сил и не проходящей через центр масс этого тела.
Осциллятор — система, совершающая колебания, то есть показатели которой периодически повторяются во времени.
Гармонический осциллятор— это система, которая при смещении из положения равновесия испытывает действие возвращающей силы  , пропорциональной смещению
, пропорциональной смещению  (согласно закону Гука):
(согласно закону Гука):
4. Упругие волны. Механизмы и условия возникновения упругих волн. Поперечные и продольные упругие волны, условия их возникновения. Формулы скорости упругих волн в различных средах. Длина волны. Циклическое волновое число. Уравнение плоской волны.
Упругие волны (звуковые волны) — волны, распространяющиеся в жидких, твёрдых и газообразных средах за счёт действия упругих сил.
10