

tmm-lab
.pdf- 43 -
ТММ. Методичні вказівки до лабораторних занять
6.2. Динамічне зрівноваження. Векторний багатокутник
_
m rz , µmrz =
Векторний багатокутник
mr , µmr =
Таблиця 2. Співставлення результатів динамічного зрівноважування
Рішення |
mI rI |
ϕ I |
|
mII rII |
ϕ II |
Графічне |
|
|
|
|
|
|
|
|
|
|
|
Аналітичне |
|
|
|
|
|
|
|
|
|
|
|
Розходження |
|
|
|
|
|
|
|
|
|
|
|
Вибрані параметри |
|
|
|
|
|
mI = |
(г), rI = |
|
(мм), |
|
|
mII = |
(г), rII = |
|
(мм). |
|
|
7. Підсумки.
Кафедра теоретичної і прикладної механіки
- 44 -
ТММ. Методичні вказівки до лабораторних занять
ЛАБОРАТОРНА РОБОТА №6
ДИНАМІЧНЕ БАЛАНСУВАННЯ РОТОРІВ
Чернігівський державний технологічний університет
- 45 -
ТММ. Методичні вказівки до лабораторних занять
Мета роботи: експериментальне визначення двох додаткових мас (противаг) та місця їх закріплення, при якому досягається повна зрівноваженість ротора.
Обладнання та інструмент: установка ТММ-1, мікрокалькулятор.
Для ланок, які мають малу ширину вздовж осі обертання в порівнянні з діаметром (диски, вузькі колеса, шківи і т.п.), коли можемо приблизно вважати, що вся маса їх розташована в одній площині, перпендикулярній осі обертання, можемо обмежитись зрівноваженнями тільки вектора ( Φ = 0 ) сил інерції. Це Досягається статичним балансуванням. Повне зрівноваження обертових ланок
( Φ = 0 , M Φ = 0 ) досягається динамічним балансуванням.
Динамічне балансування проводять на балансувальних верстатах, в яких зрівноважувану ланку обертають. Вібрації опор, які при цьому виникають, заміряють спеціальними пристроями.
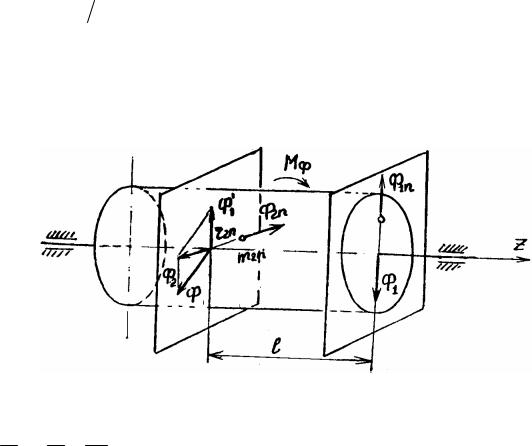
|
|
Головний |
момент M Φ |
(рисунок 1) замінимо |
двома рівними силами |
||
Φ |
1 |
= Φ′ |
= M |
Φ |
l . |
|
|
|
1 |
|
|
|
|
||
|
|
Точку прикладання Φ′ |
візьмемо в площині II , |
де розташований голо- |
|||
|
|
|
|
|
1 |
|
|
вний вектор Φ . Точку прикладання Φ1 візьмемо в площині I . Площини I і II
перпендикулярні осі обертання і розташовані на відстані l .
Рисунок 1. Схема ротора
Інерційні сили ланки, яка обертається, приводяться до двох схрещуваних сил Φ2 = Φ + Φ1′ в площині II . В загальному випадку площини I та II мо-
жуть бути вибрані довільно.
Кафедра теоретичної і прикладної механіки
- 46 -
ТММ. Методичні вказівки до лабораторних занять
Задача динамічного балансування зводиться до Φ1n = −Φ1 , Φ2 n = −Φ2 ,
тобто знаходженню двох противаг, розташованих в двох довільно вибраних площинах, які перпендикулярні осі обертання ланки.
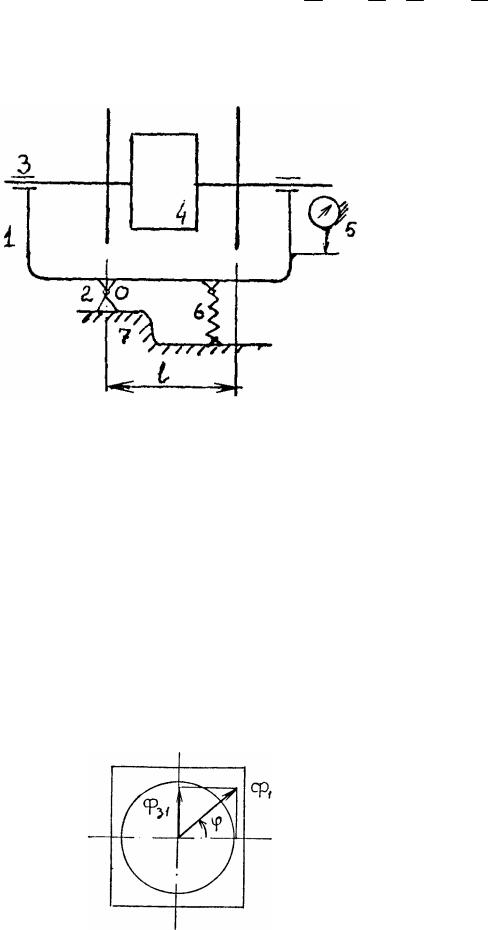
Рисунок 2. Схема установки
В основу багатьох балансувальних верстатів покладена схема системи Шитікова Б.В. Ланку 4, яку балансують, укладають цапфами валу на підшипники 3 рами 1. Рама з основою 7 з’єднана з одного боку шарніром 2, а з другого пружною ланкою 6. Таким чином, рама разом з ротором може коливатись відносно осі O . Амплітуда коливань вимірюється приладом 5. При обертанні лан-
ки 4 сила Φ З1 (рисунок 3) буде відтворювати збуджуючий момент відносно осі
O .
M |
Φ |
= Φ |
З1 |
= Φ l sin(ϕ ) = m ρ |
lω2 sin(ϕ ) = D lω2 |
sin(ϕ ), |
(1) |
|
|
|
1 |
i i |
1 |
|
|
||
де D1 = mi ρi – дисбаланс.
Рисунок 3. Розріз ротора
Чернігівський державний технологічний університет
- 47 -
ТММ. Методичні вказівки до лабораторних занять
Збуджуючий момент змінюється по гармонійному закону з круговою час-
тотою ω , рівній кутовій швидкості ланки. M Φ , взаємодіючи з моментом від сил пружності ланки 6 та силами інерції ланки 4, визначає вимушені коливання верстата.
Якщо розігнати ротор до ωmax , а потім дати можливість йому обертатись за інерцією (вибіг), то по мірі зменшення ω буде зменшуватись амплітуда та
частота зміни M Φ .
При співпадінні частот ω = ωp (частота збуджуючого фактору та резона-
нсна) амплітуда коливань рами верстата буде найбільшою. З теорії коливань відомо, що амплітуда A вимушених коливань пропорційна амплітуді збуджую-
чого фактора (моменту) у нашому випадку дисбалансу D1 = mi ρi ,
A |
= µ ′ M |
max |
= µ ′Dlω 2 = µD , |
(2) |
||||
max |
|
|
|
|
|
1 |
|
|
де µ – масштаб дисбалансу верстата. |
|
|||||||
Якщо відомий µ , то можемо по заміряній Amax |
визначити дисбаланс D1 . |
|||||||
Для визначення µ в лабораторній роботі використовується додаткова вага G . |
||||||||
Статичний момент Dn1 противаги m повинен дорівнювати D1 і бути |
||||||||
спрямованим в протилежний бік |
|
|||||||
Dn1 = mn1 |
|
|
|
|||||
rn1 = −D1 . |
|
|||||||
Якщо виберемо rn1 , то |
|
|||||||
m |
= |
Dn1 |
. |
|
|
(3) |
||
|
|
|
||||||
n1 |
|
rn1 |
|
|
|
|||
|
|
|
|
|
||||
Якщо переставити ланку 4 в верстаті так, щоб площина I та II поміня- |
||||||||
лися місцями (тобто |
II пройде через шарнір O ), то подібним попередньому |
|||||||
можемо визначити mn 2 .
В процесі балансування з допомогою верстата Шитікова необхідно провести виміри максимальних амплітуд коливань рами I для трьох режимів:
1 – коливання рами при незрівноваженому роторі - амплітуда A1
Кафедра теоретичної і прикладної механіки

- 48 -
ТММ. Методичні вказівки до лабораторних занять
2 – коливання рами при введенні додаткової ваги G в проріз диску I |
на |
відстані ρ , розташованого в площині I – амплітуда A2 , |
|
3 – коливання рами при переміщенні ваги G на 180° в проріз диску I |
на |
відстані ρ – амплітуда A3 . |
|
Розташування сил інерції в трьох режимах див. на рисунку 4. |
|
Рисунок 4. Розташування сил інерції в трьох режимах
Q1 та Q2 рівні та протилежні нормальні сили інерції ваги G
R1 = Φ1 + Q1 , R2 = Φ1 + Q2 .
Якщо амплітуди пропорційні збуджуючій силі, то
A1 = µR1 , A2 = µR2 , A3 = µR3 .
На тій же підставі A4 = µQ1 = µQ2 .
Тут A4 – амплітуда пропорційна тільки дисбалансу введеної додаткової ваги G , розташованої на відстані ρ від центру ротора.
Якщо паралелограми сил рівні, амплітуди пропорційні силам, то можемо скористатись паралелограмом амплітуд, отриманих експериментально. На основі властивостей паралелограма
2 A2 |
+ 2 A2 |
= A2 + A2 |
, |
|
||||||
1 |
4 |
3 |
4 |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
A = |
|
|
A2 |
+ A2 |
− 2 A2 |
|
|
|
|
|
2 |
3 |
1 |
|
, |
|
|||||
|
|
|
|
|
|
|
||||
4 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
тоді |
A1 = µm1 ρ1 |
, µ = |
|
|
A1 |
, |
||||
m1 ρ1 |
||||||||||
|
|
|
|
|
|
|
||||
Чернігівський державний технологічний університет
- 49 -
ТММ. Методичні вказівки до лабораторних занять
A = µmρ , µ = |
A4 |
, m ρ |
|
= |
A1 |
mρ , |
||||||
|
1 |
|
||||||||||
4 |
|
|
|
mρ |
1 |
|
|
A4 |
||||
|
|
|
|
|
|
|
|
|||||
де m = |
G |
– додаткова маса. |
|
|
|
|
||||||
|
|
|
|
|
||||||||
|
|
g |
|
|
|
|
|
|
|
|
||
|
|
|
|
2 |
2 |
− |
2 |
|
||||
Кут |
α = arccos |
A1 |
+ A4 |
A2 |
має два значення − α та + α . |
|||||||
|
|
|
|
|
|
|||||||
|
|
|
|
|
2 A1 A4 |
|
|
|
||||
|
|
|
|
|
|
|
|
|||||
Який взяти кут, визначається експериментально.
Послідовність виконання.
1.Перевірити надійність кріплення всіх деталей.
2.Розігнати ротор до числи обертів, що перевищує резонансне. Дати мо-
жливість вільного вибігу ротору. Зафіксувати максимальну амплітуду A1 . Про-
вести дослід тричі.
3. Встановити додаткову вагу G в прорізі диску I на відстані ρ . Зробити все як в п. 2.
4. Встановити додаткову вагу G в прорізі диску I на 180° на відстані ρ .
Зробити все як в п. 2.
5. Визначити масу противаги та місце її розташування, встановити її та перевірити зрівноваження ротора.
Кафедра теоретичної і прикладної механіки

- 50 -
ТММ. Методичні вказівки до лабораторних занять
ЛАБОРАТОРНА РОБОТА №6
ДИНАМІЧНЕ БАЛАНСУВАННЯ РОТОРІВ
1.Мета роботи.
2.Теоретичне обґрунтування.
3.Характеристика експериментальної установки.
4.Методика проведення.
5.Експериментальні дані
5.1.
Таблиця 1. Амплітуда A1 коливань незрівноваженого ротора
|
1 |
|
2 |
|
3 |
|
Середнє значення |
|
|
|
|
|
|
|
|
A1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.2. |
|
|
|
|
|
|
|
Таблиця 2. Амплітуда A2 |
при m = |
(г), ρ = |
(мм). |
||||
|
|
|
|
|
|||
|
1 |
|
2 |
|
3 |
|
Середнє значення |
|
|
|
|
|
|
|
|
A2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5.3. |
|
|
|
|
|
|
|
Таблиця 3. Амплітуда A3 |
при m = |
(г), ρ = |
(мм). |
||||
|
|
|
|
|
|||
|
1 |
|
2 |
|
3 |
|
Середнє значення |
|
|
|
|
|
|
|
|
A3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6. Обробка та аналіз одержаних результатів
6.1A4 =
6.2D =
6.3ρ =
6.4cos(α ) =
7. Підсумки.
Чернігівський державний технологічний університет
- 51 -
ТММ. Методичні вказівки до лабораторних занять
ЛАБОРАТОРНА РОБОТА №7
УТВОРЕННЯ ПРОФІЛЮ ЗУБЦЯ КОЛЕСА МЕТОДОМ
ОБКАТКИ
Кафедра теоретичної і прикладної механіки
- 52 -
ТММ. Методичні вказівки до лабораторних занять
Мета роботи: існують два принципово різні методи виготовлення циліндричних зубчастих коліс – копіювання та примусова обкатка. В даній роботі наочно вивчається метод виготовлення зубчастих коліс за методом обкатки, явище підрізання зубців і його уникнення зміщенням зуборізного інструменту.
Обладнання та інструмент: прилад ТММ-42, паперове коло, олівець, циркуль, мікрокалькулятор.
При обкатці заготовки інструментальною рейкою остання здійснює пово- ротно-поступальний рух, перпендикулярний до площини нарізуваного колеса. Заготовка має подвійний рух: обертаючись навколо своєї осі, вона одночасно переміщується вздовж рейки.
Зміщення рейки відносно заготовки (виправлення) використовують для усунення підрізання зубців, а також для покращення якісних показників зачеплення.
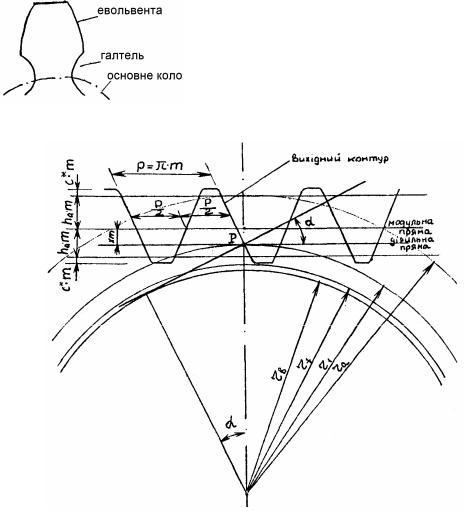
Рисунок 1. Зубець
Зубець буде підрізаним, якщо профіль (рисунок 1) у його основі (галтель) не буде плавно спряженим з евольвентною частиною.
Рисунок 2. Рейкове зчеплення
Чернігівський державний технологічний університет