Vopros_48_2014
.docxСкоростная девиация и её учёт
Движение судна считается однозначно заданным, если известны его скорость V и истинный курс ИК (рис.2.20). Другим вариантом определения движения является задание составляющих скоростей: VN — вдоль меридиана и VЕ — вдоль параллели (см. рис.2.20). Связь между двумя вариантами устанавливается следующими соотношениями:
VN = V cos ИК; VE = V sin ИК.
N
ИК
S
Рис.2.20

 ,
приводит к возникновению угловой
скорости, вектор которой равен отношению
,
приводит к возникновению угловой
скорости, вектор которой равен отношению
 и направлен по линии EW
к W.
и направлен по линии EW
к W.
Соответственно
движение с линейной скоростью происходящее
по дуге параллели радиусом
 ,
приводит к
появлению угловой скорости, вектор
которой равен отношению
,
приводит к
появлению угловой скорости, вектор
которой равен отношению

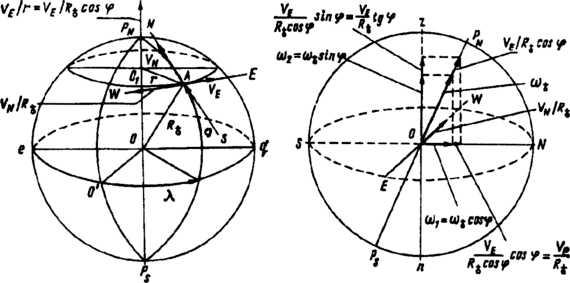
Пользуясь тем свойством, что вектор угловой скорости является свободным вектором, т.е. его можно переносить параллельно самому себе в любую точку, нанесем этот вектор на ось вращения Земли, т.е. на ось PNPS по направлению к РN
Теперь установлена совокупность угловых скоростей
Рис. 2.21 рис. 2.22
(поле
угловых скоростей), которые
воспринимаются чувствительным элементом
гирокомпаса, установленного на движущемся
судне. Указанное поле угловых скоростей
включает в себя составляющие ω1
и ω2
угловой скорости суточного вращения
Земли (переносные угловые скорости) и
составляющие
 и
и  угловой
скорости вращения судна относительно
Земли. Все перечисленные составляющие
показаны на рис.2.22,
там же отчетливо видно, каким образом
они разложены по осям горизонтной
системы координат ONEn.
угловой
скорости вращения судна относительно
Земли. Все перечисленные составляющие
показаны на рис.2.22,
там же отчетливо видно, каким образом
они разложены по осям горизонтной
системы координат ONEn.
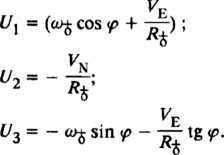
В итоге поле угловых скоростей однозначно характеризуется следующими тремя составляющими: а) по оси N - S по направлению к N; б) по оси Е - W по направлению к Е; в) по оси Z - п по направлению к n, т.е. соответственно
На
рис.2.23 показана плоскость истинного
горизонта (вид с зенита) и расположенные
в этой плоскости составляющие Ul
и U2,
данные в
развернутом виде. Равнодействующая
всех составляющих угловых скоростей,
лежащих в плоскости горизонта,
определяется по значению выражением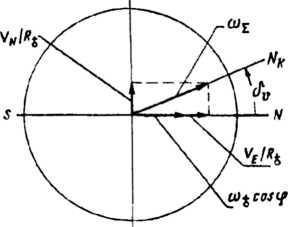
 (2.45)
(2.45)
и по направлению — углом δV, тангенс которого находят по формуле
(знак «минус» означает, что при заданных
исходных условиях угол
 имеет
западное наименование). Поскольку
положение равновесия главной оси ОХ
чувствительного элемента гирокомпаса
теперь располагается в вертикальной
плоскости, содержащей вектор
равнодействующей
имеет
западное наименование). Поскольку
положение равновесия главной оси ОХ
чувствительного элемента гирокомпаса
теперь располагается в вертикальной
плоскости, содержащей вектор
равнодействующей
 ,
указанная плоскость получает название
плоскость
компасного меридиана,
а ее угловое отклонение от плоскости
истинного меридиана
,
указанная плоскость получает название
плоскость
компасного меридиана,
а ее угловое отклонение от плоскости
истинного меридиана
 получает название скоростная
девиация гирокомпаса.
получает название скоростная
девиация гирокомпаса.
Основные закономерности скоростной девиации, вытекающие из анализа формулы (2.48), состоят в следующем.
-
Возникновение скоростной девиации обусловливается наличием у судна северной составляющей скорости движения.
-
Девиация линейно зависит от скорости судна.
-
Девиация имеет полукруговой характер зависимости от компасного курса (максимальные по абсолютному значению девиации достигаются на курсах 0 и 180°, нулевые — на курсах 90 и 270°).
4.Зависимость девиации от широты определяется функцией 1/cosφ = secφ, поэтому особенно резкое увеличение его численного значения происходит в широтах выше 70°
УЧЁТ: 1.Скоростная девиация в гирокомпасе «Курс-4» и «Курс-4М» учитывается путем ее исключения из показаний всех репитеров с помощью корректоров полуавтоматического типа. Необходимо подчеркнуть, что в обоих указанных типах компасов чувствительный элемент является автономным, т.е. его показания не корректируются.
2. Скоростная погрешность в ГК «Гиростар-2» и «Стандарт» рассчитывается с помощью микропроцессора, в который вводится широта и скорость (GPS, лаг) и далее исключается из показаний репитеров.
3. В старых ГК скоростная погрешность исключается из показаний репитера с помощью электромеханического корректора.
4. Если микропроцессор вышел из строя, скоростная погрешность определяется с помощью таблиц и учитывается (таблиц скоростной девиации(номограмм))
5.Формула (2.48) имеет важное практическое значение, поскольку при выходе корректора из строя скоростную девиацию приходится учитывать аналитическим путем с помощью указанной формулы.
Пример 2.2. Вследствие неисправности
корректора рассчитать численное значение
и определить знак поправки ДГК гирокомпаса
на скоростную девиацию при следующих
исходных данных: К= 25 уз; КК = 180°; φ=
70°. Поскольку скорость морских судов
всегда измеряется в узлах, при
использовании формулы (2.48) целесообразно
константу
 ,
определяющую линейную скорость точки
земной поверхности, расположенную на
экваторе, также выразить в узлах Расчеты
показывают, что Rз
= 900уз. С учетом этого значения имеем:
,
определяющую линейную скорость точки
земной поверхности, расположенную на
экваторе, также выразить в узлах Расчеты
показывают, что Rз
= 900уз. С учетом этого значения имеем:
![]()
Откуда

Влияние движения судна на поведение гирокомпаса
Из содержания предшествующего параграфа следует, что положением равновесия главной оси чувствительного элемента (статического или динамического — в зависимости от того, снабжен чувствительный элемент демпфирующим устройством или нет) является плоскость компасного меридиана, отклоненная от плоскости истинного меридиана на угол
С целью анализа тех изменений, которые претерпевают основные характеристики чувствительного элемента гирокомпаса, установленного на судне, движущемся с постоянной скоростью и на постоянном курсе, необходимо составить дефференциальные уравнения его движения по отношению к плоскости компасного меридиана и истинного горизонта. Будем считать при этом для простоты, что чувствительный элемент не снабжен демпфирующим устройством.
Поскольку процедура составления уравнений движения по способу проф. Б.И.Кудревича в данном случае аналогична той, которая была подробно изложена в параграфе 2.1.5, предлагается выполнить соответствующую работу в качестве самостоятельного упражнения.
При этом окажется полезным рис.2.23. Особо подчеркнем, что ставится задача изучения движения чувствительного элемента гирокомпаса по отношению к системе координат ONK Екn, отклоненной от стандартной горизонтной системы координат ONEn на угол ẟv. Отклонение оси ОХ чувствительного элемента в горизонтальной плоскости от NK обозначим α1 (рис.2.24), у гол β остается прежним. После выполнения всех необходимых действий и с учетом тех же допущений, что были сделаны в параграфе 2.1.5, получим следующую систему дифференциальных уравнений:

Где W∑ представлена формулой (2.45)
Как это вытекает из системы (2.55), положение равновесия оси ОХ в азимуте а1r= 0, что и следовало ожидать вследствие смещения системы координат ONK Ек п на угол по отношению к системе ONEn.
Положение равновесия по углуβ1, определяется следующим выражением:
![]()
![]()
откуда
следует [ср. с выражением (2.9) ], что оно
зависит теперь не только от широты
места, но и от параметров движения судна.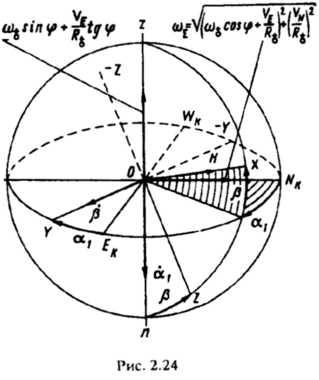
Выполним по отношению к системе уравнений (2.55) операцию разделения переменных. Дифференцируя первое из уравнений этой системы в предположении, что V = const, ИК = const, и пренебрегая медленными изменениями широты φ вследствие получим
![]()
откуда
Подставляя это значение β во второе уравнение системы (2.55), получим дифференциальное уравнение, характеризующее свободное движение главной оси чувствительного элемента ОХ по отношению к плоскости компасного меридиана:

Из уравнения (2.57) следует, что направляющий момент гирокомпаса

претерпел значительные изменения по сравнению с аналогичной характеристикой, которая была получена ранее для случая неподвижного основания [см. формулу (2.13) 1.
В рассматриваемом случае направляющий момент Rz зависит не только от горизонтальной составляющей вращения Земли, но и от параметров движения судна. Следствием этого факта является принципиально важный вывод о возможности обращения в ноль направляющего момента в широте, отличной от 90“.
Действительно, пусть судно движется вдоль параллели, т.е. Vn= 0. Если при этом составляющая скорости такова, что соблюдается равенство
![]()
то направляющий момент Rz обратится в ноль. Это означает, что если какое-то внешнее возмущение выведет главную ось чувствительного элемента ОХ из компасного меридиана, то из-за потери избирательности она в это положение равновесия уже не возвратится.
Представим выражение (2.59) в другом виде:
![]()
Зная значение VE, можно на основании выражения (2.60) определить широту, в которой компас потеряет направляющий момент (эта широта называется критической):

Возвратимся к уравнению (2.57) и приведем его к нормальному виду
![]()
Где
![]()
откуда,
учитывая выражение (2.45), найдем период
собственных незатухающих колебаний
гирокомпаса, установленного на судне,
движущемся с постоянной скоростью на
постоянном курсе: 
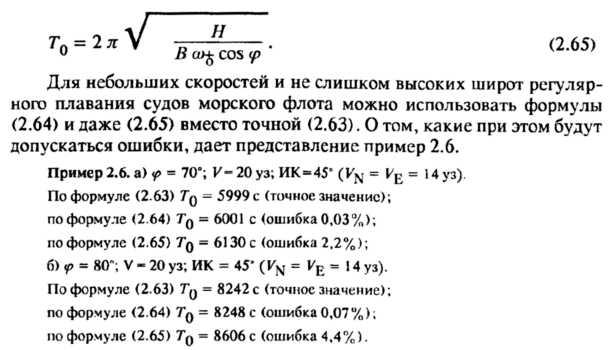
Формула (2.63) является совершенно строгой. Для дальнейшего представляет интерес допустимость использования для определения периода Т0 колебаний гирокомпаса на движущемся судне более простых приближенных формул.
Если
пренебречь величиной (Vn/Rз)2
по
сравнению
с выражением:![]()

а если еще дополнительно пренебречь величиной Ve/Rз по сравнению WзCOSφ, то получим уже известную формулу (2.16) для периода колебаний гирокомпаса на неподвижном судне