

Федоров
.pdfГ1
 Дв.л
Дв.л 


Р1 Г2
Г3
 Дв.пр
Дв.пр 


Р2 Г4
А 

Црщ |
рщ |
|
Потребители |
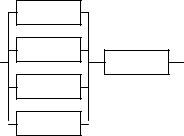
Рис. 3.1. схема электроснабжения СЭУ:
Црщ, рщ – центральный распределительный щит и распределительный щит, соответственно
Пример выполнения задания № 1
1)По электрической схеме проекта САУ выясняем типы элементов, входящих в проектируемую систему, и их количество Ni;
2)По табличным данным об интенсивностях отказов вычисляем суммар-
ную интенсивность отказов каждой группы Ni λi;
3) Результирующая интенсивность отказов системы равна сумме интенсивностей отказов всех составных элементов в группах.
15
λc = ∑N jλ j = 78,59 10−6.
j=1
4)Среднее время безотказной работы
T |
= |
1 |
= |
1 |
=12700 часов. |
|
78,59 10−6 |
||||
cp |
|
λc |
|
||
5) Вероятность безотказной работы САУ
Pc (100) = e −78,59 10−6 100 = 0,992.
Пример выполнения задания № 2
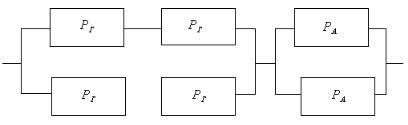
1) Составляем схему надежности (рис. 3.2)
 Pг1
Pг1 
 Pг2
Pг2
PA
 Pг3
Pг3 
 Pг4
Pг4
Рис. 3.2
12
Пусть все генераторы равнонадежны, т. е. Рг.= Рг1 = Рг2 = Рг3 вероятность безотказной работы генератора.
РА – вероятность безотказной работы аккумулятора.
λг = 10–5 ч–1 ; λа=10–6 ч–1 ;tp=10 000 ч.
λг= ?; λа = ? – Интенсивности отказов, ч–1 ;tp = Наработка изделий,
2) Найдем вероятность безотказной работы системы:
Рс= (Р4г + 4Р3гqг + 2Р2гq2г)Ра;
Pr4 – все 4 генераторы исправны;
= Рг4 –
ч.
4Pг3qr – отказал один генератор; 2P2rqr2 – отказали два генератора на
одном двигателе; (всего здесь 6 состояний: исправный 1 и 2, 1 и 3, 1 и 4, 2 и 3, 2 и4, 3 и 4;
но отвечают поставленным условиям только две гипотезы (1я и 6я)
3) Если в условии будет считаться система работоспособной при исправности хотя бы одного генератора и аккумулятора, то
Pc = (Pr 4 + 4 Pr 3 q r + 6 Pr 2 q r 2 + 4 Pr q r 3 ) P A .
и схема надежности имеет вид (рис. 3.3):
Pг
Pг
PA
Pг
Pг
Рис. 3.3
4) Если вероятность безотказной работы ищем в течение времени tp,
а интенсивности отказов λr и λA известны (из справочных таблиц), то
Pr =l −λAtp , PA =l −λrtp .
5) Если λ << 0,1, то можно экспоненту заменить двумя членами ее разложения в ряд l −λt =1 − λt (ошибка <0,1), тогда qr = λr t p .
6)Среднее время безотказной работы (наработка на отказ)
∞∞
Тср = ∫Р(t)dt = ∫t f (t)dt.
0 0
13
Для нашего случая:
∞ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tcp = ∫[l −4λrt p + 4l −3λrt p (1 −l −λrt p ) + 2l −2λrt p (1 −l −λrt p )] l −λAt p = |
|||||||||||||||||||||
0 |
1 |
|
|
|
|
4 |
|
|
|
|
4 |
|
|
|
2 |
|
|
||||
= |
|
|
+ |
|
|
|
− |
|
|
|
+ |
|
− |
||||||||
4λ +λA |
|
|
|
|
|
4λr +λA |
|
|
|||||||||||||
|
|
|
3λr +λA |
|
2λr +λA |
||||||||||||||||
4 |
|
|
|
|
|
2 |
|
|
|
|
2 |
|
|
|
|
1 |
= 708484. |
||||
− |
|
|
+ |
|
|
+ |
|
− |
|
||||||||||||
3λr +λA |
4λr +λA |
2λr +λA |
4λr +λA |
||||||||||||||||||
7) Если бы резервирование отсутствовало, то |
|
|
|
|
|||||||||||||||||
|
|
Р |
(t |
p |
) = P2 Р |
А |
= е−(2λГ +λА)t p ; |
||||||||||||||
|
|
нерез. |
|
|
|
Г |
|
|
|
|
|
|
|
||||||||
Tср.нерез. = |
|
|
|
|
1 |
|
|
; следовательно Трез. fТнерез. |
|||||||||||||
2λГ + λА |
|||||||||||||||||||||
8) При втором варианте, для времени наработки t = 10000 ч.: |
|||||||||||||||||||||
P =[e−4λГt + 4e−3λГt (1 −e−λГt ) + 6e−1λГt (1 −е−λГt )2 + 4e−λГt (1 −e−λГt )3 ]× |
|||||||||||||||||||||
C
×e−λAt =[e−4λГt + 4e−3λГt − 4e−4λГt + 6e−2λГt −12e−3λГt + 6e−4λГt + 4e−λГt − −12e−2λГt +12e−3λГt − 4e−4λГt ] e−λAt =(−e−4λГt + 4e−3λГt − 6e−2λГt +
+4e−λГt ) e−λAt =(−e−0.4 + 4e−0.3 − 6e−0.2 + 4e−0.1) e−0.01 ≈ 0,9897.
9)При первом варианте:
РС =[е−4λГt + 4e−3λГt (1 − e−λГt ) + 2e−2λГt (1 − e−λГt )2 ]e−λAt = = (e−4λГt + 4e−3λГt − 4e−4λГt + 2e−2λГ − 4e−3λГt + 2e−4λГt ) e−λAt =
=(2e−2λГt − e−4λГt ) e−λAt = (2e−0.2 − e−0.4 ) e−0.01 ≈ 0,95745.
10)Наработка при втором варианте:
∞ |
|
|
|
|
1 |
|
|
|
|
4 |
|
|
|
|
|
6 |
|
|
|
4 |
|
|||
Tcp2 = ∫PC (t)dt = − |
|
|
|
+ |
|
|
|
|
− |
|
+ |
|
= |
|||||||||||
4λГ + λ |
|
|
|
|
|
|
|
|
|
λГ |
+ λА |
|||||||||||||
0 |
|
|
|
А |
3λГ + λА |
2λГ + λА |
|
|||||||||||||||||
|
|
|
|
4 |
|
|
|
|
|
1 |
|
|
|
|
|
6 |
|
|
|
|
|
|||
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
=182564 |
ч. |
|
|||||||
= |
|
+ |
|
|
− |
|
|
|
− |
|
|
|||||||||||||
0,000031 |
0,000011 |
0,000041 |
0,000021 |
|
||||||||||||||||||||
11) При нерезервированной системе: |
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
Р |
= P |
Р |
А |
= е−(λГ +λА )t |
= е−0.11 ≈ 0,89; |
|
|
|
|||||||||||||||
|
С |
|
|
|
Г |
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tср.нерез. = |
|
|
|
=90909 ч. |
|
|
|
|||||||||||
|
|
|
|
|
|
0.000011 |
|
|
|
|||||||||||||||
14
12) Если зарезервировать аккумулятор, то схема имеет вид (рис. 3.4):
Рис. 3.4.
РА∑ =1 − (1 − РА)2 = 2РА − РА2 = 2е−λAt − e−2λAt = 2e−0.01 − e−0.02 ≈ 0,9981.
Практическое занятие № 4
Тема: Техническая диагностика.
Цель занятия: Приобретение практических навыков по составлению логических моделей диагностики состояния ТС.
Время занятий: 4 часа.
Краткие теоретические сведения.
При поиске неисправностей в ТС применением логических моделей применяется следующая последовательность:
1)Из практических соображений устанавливается потребная подробность диагностики состояния системы;
2)Устанавливается состав параметров, который надлежит контролировать в интересах поиска неисправностей;
3)Записываются логические переменные (бинарные признаки) возможных состояний неисправности и определяется перечень различаемых неисправных состояний системы;
4)По функциональной схеме системы составляется логическая модель, на которой в качестве выходов блоков, элементов, агрегатов ТС фигурируют не их выходные параметры, а бинарные признаки (логические переменные) состояния. Если некоторый реальный блок имеет два и более выходных параметра (т.е. бинарных признака состояния), то на логической модели он представлен в виде нескольких логических блоков, у каждого из которых только один выход;
5)По логической модели составляется таблица «СОСТОЯНИЯ – ПРИЗНАКИ».
6)Минимизируется состав признаков, достаточных для различения всех неисправных состояний друг от друга;
7)По минимизированной таблице «СОСТОЯНИЯ - ПРИЗНАКИ» составляется технологическая карта поиска неисправности для механика или логическая схема автомата поиска неисправности.
15

Т.о. логические модели составляются на основе функциональных схем систем, представляющих собой совокупность связанных между собой блоков. Каждый блок Бі может иметь в общем случае m входов и n выходов (рис. 4.1,а). К входным относятся:
−Внешние управляющие сигналы, в том числе тест сигналы:
Х= (Х1і, Х2і, ... Хкі);
−Сигналы с выходов других блоков системы
У= (У1і, У2і,... Уеі);
−Входы, обеспечивающие питаний блока электрической и механической энергией
U(u1і, u2і,… urі,);
− Воздействия, характеризуеющие внешнние условия функционирования блока (to и Poкр. среды, уровень вибрации и т. п.)
V(V1і, V2і,… Vtі,).
При составлении логической модели по функциональной схеме каждый блок представляется n блоками, Qі1, Qі2, …, Qіn, каждый из которых имеет один выход выход Уі и S входов, существенных для выхода Уіj (рис. 4.1,б). При этом все связи между входами и выходами в логической модели сохраняется такими же, как и в функциональной схеме.
|
u1i |
uri |
v1i vti |
|
|
|
|
K |
K |
|
|
x1i |
|
|
|
|
yi1 |
x2i |
M |
|
Бi |
M |
yi2 |
xki |
|
yin |
|||
|
|
||||
|
|
|
K |
|
|
|
y1i |
y2i |
yei |
|
|
|
|
|
а |
|
|
S1 |
M |
|
Q1i |
|
yi1 |
|
|
|
M |
|
|
Sj |
M |
|
Qij |
|
yij |
|
|
|
M |
|
|
Sn |
M |
|
Qin |
|
yin |
б
Рис. 4.1. Модель блока:
а) блок исходной функциональной схемы; б) логическая модель этого блока
16
Pассмотрим методику оценки работоспособности и поиска неисправности в системе, состоящей из нескольких блоков.
Возьмем некоторую судовую систему и, в соответствии с вышеизложенной последовательностью работ получим по функциональной схеме следующую логическую модель (рис. 4.2).
Х1
Х4
У1
Q1
Обр.связь
У4 |
Q4 |
Х2 |
Х3 |
У2 |
У3 |
Q2 |
Q3 |
Обр.связь
Обр.связь У5
Х5
Q5
Рис. 4.2. Логическая модель системы
Хі – внешние сигналы и возмущения на блок.
Хі, Уі, Qi – логические переменные, принимающие одно из двух значений: «1», если сигнал в допуске, «0» – если нет.
Qi = 1, если блок работоспособен; 0, если блок неисправен.
Назовем выражение
Fi = Λk |
Χj = Χ1Χ2 ΧΚ , |
(4.1) |
j=1 |
|
|
являющееся конъюнкцией входных переменных, логической функцией условий работы i=го блока по Уi=мч выходу:
Fi = 1, если все к входов равны 1,
0, если хотя бы один из к входов равен 0.
Тогда выходные сигналы Уі можна рассматривать как конъюнкцию переменных
Уi = Fi Qi = Fi Qi . |
(4.2) |
Эта формула означает, что выход Уі блока Qi |
будет в допуске только |
в том случае, когда все его входы в допуске (Fi = 1) и блок исправен (Qi = 1).
Уi = 1, если Fi = 1; Qi = 1
0, если Fi = 1, Qi = 0; или Fi = 0, Qi = 1; или Fi = 0, Qi = 0.
Очевидно, что контрольный блок в целом исправен, если истинным является логическое высказывание вида
17
У1 У2 Уn = Λn |
Уі =1, |
(4.3) |
i=1 |
|
|
т. е. в допуске находятся все его выходные параметры.
Найдем минимальную совокупность выходных параметров, контроль которых позволяет вынести суждение об исправности всей системы (т. е. для поиска неисправности любого из блоков системы). Для этого составим прямоугольную матрицу (табл. 4.1), в которой по вертикали записываются различные состояния системы, связанные с отказом того или иного блока, а по горизонтали – значения выходных переменных блоков при этих состояниях.
Таблица 4.1
|
|
|
У1 |
У2 |
У3 |
У4 |
У5 |
|
|
Работоспособное состояние |
|
1 |
1 |
1 |
1 |
1 |
|
|
Отказ Q1 |
|
0 |
0 |
1 |
0 |
1 |
|
|
Отказ Q2 |
|
1 |
0 |
1 |
1 |
1 |
|
|
Отказ Q3 |
|
0 |
0 |
0 |
0 |
0 |
|
|
Отказ Q4 |
|
1 |
1 |
1 |
0 |
0 |
|
|
Отказ Q5 |
|
0 |
0 |
0 |
0 |
0 |
|
Заполнение таблицы «состояния – признаки» производится следующим |
||||||||
образом: |
|
|
|
|
|
|
||
1) Работоспособное состояние, когда |
на |
основании |
выражений (4.1) |
|||||
и(4.2) все признаки уі=1.
2)Неработоспособное состояние из-за отказа блока Q1(Q1 = 0). Тогда будут не в допуске выходные параметры блоков Q2 и Q4,
т. е. у1 = у2 = у4 = 0. аналогично заполняем всю таблицу для пяти блоков.
Из табл. 4.1 следует, что состояние отказов блоков Q3 и Q5 неразличимы по выходным параметрам у1,…у5.
Это объясняется тем, что логическими методами не представляется возможности выявить отказы блоков, образующих замкнутую систему с обратной связью. Можно установить неисправность системы, но нельзя установить, изза отказа какого именно блока система оказалось неисправна.
В нашем случае, по модели (рис. 4.2) видно, что блоки Q3 и Q5 образуют замкнутую систему. Поиск неисправностей в таких замкнутых системах производится специальными методами, один из которых предполагает «РАЗМЫКАНИЕ СИСТЕМЫ».
Т.о. таблица признаков состояний может быть упрощена (4.2), где состояние отказа Q5 не рассматривается отдельно, а говоря о состоянии отказа Q3 подразумеваем, что это либо Q3, либо Q5, а для анализа отказа конкретного блока, надо разорвать связь между ними.
18
Таблица 4.2
S |
/ |
У |
У1 |
У2 |
У3 |
У4 |
У5 |
S0(работоспособное со- |
1 |
1 |
1 |
1 |
1 |
||
стояние) |
|
|
|
|
|
|
|
S1 – отказ Q1 |
|
0 |
0 |
1 |
0 |
1 |
|
S2 |
– отказ Q2 |
|
1 |
0 |
1 |
1 |
1 |
S3 |
– отказ Q3 V Q5 (или) |
0 |
0 |
0 |
0 |
0 |
|
S4 |
– отказ Q4 |
|
1 |
1 |
1 |
0 |
0 |
Состояния S1, S2, S3, S4 – неисправные.
ОПРЕДЕЛИМ минимальное ЧИСЛО ПРИЗНАКОВ ДЛЯ РАЗЛИЧИЯ РАБОТОСПОСОБНОГО СОСТОЯНИЯ (КОНТРОЛЬ РАБОТОСПОСОБНОСТИ).
Выпишем из табл. 4.2 совокупности выходов, позволяющих попарно
отличить работоспособное состояние So от других состояний: S1, S2, S3, S4. |
|
||
a) |
So отличается от S1 признаками у1 или у2 или у4 (У1 V У2 V У4); |
|
|
б) |
So отличается от S2 |
признаком У2; |
|
в) |
So отличается от S3 |
признаком У1 V У2 V У3 У4 V У5; |
|
г) |
So отличается от S4 |
признаком У4. |
|
Логическое произведение этих совокупностей |
|
||
|
(У1 V У2 V У4)· У2· (У1 V У2 V У3 У4 V У5)· У4, |
(4.4) |
|
дает все возможные наборы выходных параметров, по которым можно отличить состояние So от всех других. Используя метод «поглощения», мы получим минимальное число признаков для определения So:
У2 У4 =У2 У4 , |
(4.5) |
ОПРЕДЕЛИМ минимальное ЧИСЛО ПРИЗНАКОВ, ДОСТАТОЧНОЕ ДЛЯ РАЗЛИЧИЯ ВСЕХ СОСТОЯНИЙ ДРУГ ОТ ДРУГА (ПОИСК НЕИСПРАВНОСТЕЙ).
а) S1 отличается от S2 признаками У1 V У4;
б) S1 отличается от S3 признаками У3 V У5;
в) S1 отличается от S4 признаками У1 V У2.
Логические произведения этих совокупностей |
|
(У1 V У4)·(У3 V У5)·(У1 V У2) = |
|
У1·У3 V У1·У5 V У2·У3·У4 V У2·У4·У5 |
(4.6) |
Дает все возможные наборы выходных параметров, по которым можно |
|
отличить состояние S1 от всех других. Минимальными являются наборы |
|
У1 У3 или У1 У5, |
(4.7) |
19
Выпишем теперь из табл. 4.2 совокупности выходов, отличающие попарно все неработоспособные состояния друг от друга:
S1 от S2 – У1 V У4; S2 от S3 – У1 V У3 V У4 V У5;
S1 от S3 – У3 V У5; S2 от S4 – У2 V У4;
S1 от S4 – У1 V У2; S3 от S4 – У1 V У2 V У3 V У5.
Логические произведения этих шести совокупностей |
|
(У1 V У4) · ( У3 V У5) · ( У1 V У2) · ( У1 V У3 V У4 V У5) · |
|
·( У2 V У4) · ( У1 V У2 V У3 V У5) |
(4.8) |
дадут наборы выходных параметров, позволяющие различить все неработоспособные состояния друг от друга.
Минимальными из них по составу будут следующие наборы:
у1у2у3; у1у2у5; у1у3у4; у1у4у5; у2у3у4; у2у4у5, (4.9).
Для поиска неисправного блока можно взять любой из этих наборов, т. к. все они содержат по три параметра.
Для получения минимального набора параметров, позволяющего производить как контроль работоспособности, так и поиск неисправности, необходимо к логическому произведению (4.8) добавить признаки контроля работоспособности У2 ٨ У4:
У2·У4 · (У1 V У4) · ( У3 V У5) · ( У1 V У2) · ( У1 V У3 V У4 V У5) |
|
( У2 V У4) · ( У1 V У2 V У3 V У5)=У2·У·3У4 V У2·У4·У5, |
(4.10) |
т.о. для поиска неисправностей достаточен минимальный набор У2У3У4 или
У2У4У5.
Выбрав, например, правую реализацию У2У4У5, составим карту контроля
(табл. 4.3)
Таблица 4.3
Состояние |
У2 |
У4 |
У5 |
|
признаки |
|
|
|
|
S0 – система исправна |
1 |
1 |
1 |
|
S1 |
– отказ Q1 |
0 |
0 |
1 |
S2 |
– отказ Q2 |
0 |
1 |
1 |
S3 |
– отказ Q3 V Q5 |
0 |
0 |
0 |
S4 |
– отказ Q4 |
1 |
0 |
0 |
|
|
|
|
|
Подобные КАРТЫ КОНТРОЛЯ составляются заранее и выдаются в качестве руководства для оценки состояния различных систем механикам по обслуживанию ТС.
20
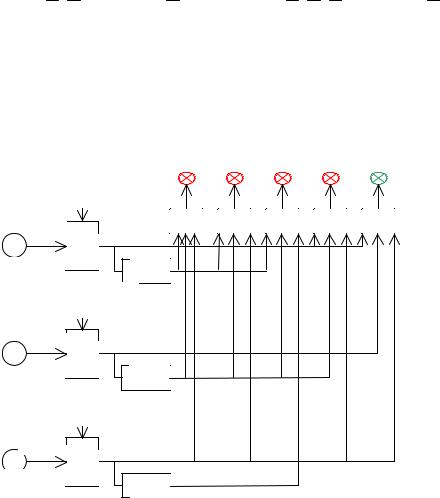
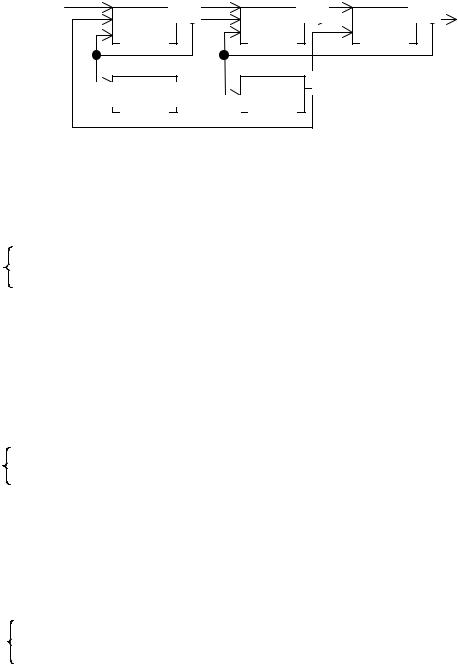
Одна из возможных блок-схем автомата контроля системы, представляющая собой возможную реализацию логической схемы контроля, изображена на рис. 4.3.
Функции состояния:
So =У2У4У5 ; S1 =У2У4У5 ; S2 =У2У4У5 ; S3 =У2У4У5 ; S4 =У4У4У5. (4.11)
По включению соответствующей лампочки ОДНОЗНАЧНО устанавливается неисправный блок
Автомат может быть дополнен специальной схемой различения отказов блоков Q3 и Q5 друг от друга, однако при этом потребуется размыкание одной из связей между ними.
oтк Q1 |
oтк Q2 oтк Q3 V Q5 oтк Q4 |
Сис. испр |
У2доп
|
У2 |
И |
И |
И |
И |
И |
D2 |
К |
|
|
|
|
|
|
|
не |
|
|
|
|
|
|
У4доп |
|
|
|
|
D4 |
У4 |
К |
|
|
|
|
|
|
не |
|
|
|
|
|
|
У5доп |
|
|
|
|
D5 |
У5 |
К |
|
|
|
|
|
|
|
|
|
|
|
|
|
не |
|
|
|
|
Рис. 4.3. Принципиальная схема автомата контроля: К – контрольный элемент (сравнения)
Задание № 1
Определить минимальное число признаков для различения работоспособного состояния(проведение контроля работоспособности).
Задание № 2
Определение минимального числа признаков, для различения неработоспособных состояний(проведение поиска неисправности).
Задание № 3
Составление схемы автомата контроля в соответствии с минимальным числом признаков, полученных в заданиях 1 и 2.
21