

5.1 Системи електричних вимірювальних приладів
Електричний вимірювальний прилад складається з рухомої й нерухомої частин. По переміщенню рухомої частини вимірюють значення вимірюваних величин.
Залежно від принципу дії розрізняють системи: магнітоелектричну, електромагнітну, електродинамічну, теплову, індукційну й ін.
У таблиці 5.1 наведені умовні позначення найбільш широко застосовуваних систем приладів. Ці позначення й інші найважливіші характеристики вказуються на лицьовій панелі електричних вимірювальних приладів (рис. 5.1).
Таблиця 5.1
Системи електричних вимірювальних приладів і їхні умовні позначення
|
Система приладу |
Позначення |
|
Магнітоелектрична |
|
|
Електромагнітна | |
|
Електродинамічна | |
|
Теплова | |
|
Індукційна |
Робота приладів магнітоелектричної системи заснована на взаємодії поля постійного магніту й рухомої котушки.
На рис. 5.2 схематично показана основна частина магнітоелектричного вимірювального механізму: рухома котушка, розташована в сильному рівномірному радіальному магнітному полі.
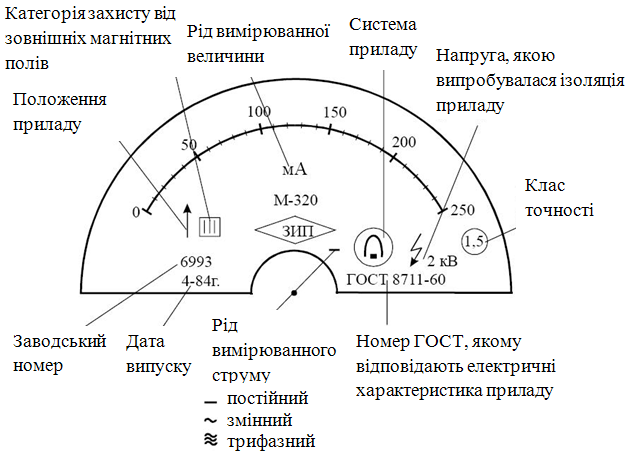
Рис. 5.1. Шкала вимірювального приладу
Рухома котушка з тонкого мідного або алюмінієвого проводу намотана на каркас (або без нього). На осі рухомої частини приладу укріплена стрілка, кінець якої переміщається по шкалі електричного вимірювального приладу.
При протіканні по котушці електричного струму відповідно до закону Ампера
виникають
сили F
,
що прагнуть повернути котушку. При
рівності обертаючого ![]() і
протидіючого
і
протидіючого ![]() моментів
котушка зупиняється.
моментів
котушка зупиняється.
Для
створення протидіючого моменту ![]() і
одночасно для підведення струму в
котушку служать дві спіралі.
і
одночасно для підведення струму в
котушку служать дві спіралі.
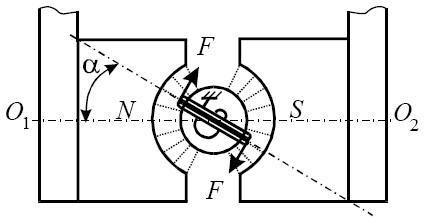
Рис. 5.2. Рухлива котушка в радіальному магнітному полі
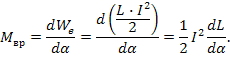
Загальний вираз для обертаючого моменту має вигляд:
![]() =
dW
/ d
=
dW
/ d![]() (5.1)
(5.1)
де W - енергія електромагнітного поля, зосереджена у вимірювальному механізмі;
![]() - кут
повороту рухливої частини.
- кут
повороту рухливої частини.
Енергія електромагнітного поля W дорівнює роботі А по переміщенню активної частини проведення котушки в постійному магнітному полі з індукцією В.
Відповідно
до закону Ампера сила F,
що діє на активну частину проведення
котушки при протіканні по ній струму
![]() дорівнює
дорівнює
![]() (5.2)
(5.2)
де
![]() - кут
між напрямком струму в активній частині
проведення й індукцією магнітного поля;
- кут
між напрямком струму в активній частині
проведення й індукцією магнітного поля;
![]() -
довжина
активної частини котушки.
-
довжина
активної частини котушки.
У
нашому випадку ![]() .
Отже, робота з переміщення двох активних
частин проведення котушки, перпендикулярних
площині креслення (рис. 5.2), дорівнює
.
Отже, робота з переміщення двох активних
частин проведення котушки, перпендикулярних
площині креслення (рис. 5.2), дорівнює
![]() ,
(5.3)
,
(5.3)
де
![]() =
= ![]() - довжина
траєкторії активної частини провода;
- довжина
траєкторії активної частини провода;
![]() - радіус
траєкторії;
- радіус
траєкторії;
![]() - кут
повороту котушки.
- кут
повороту котушки.
Підставляючи (5.3) в (5.1) одержуємо
![]()
Так
як протидіючий момент ![]() створюється
пружними елементами, то для сталого
режиму
створюється
пружними елементами, то для сталого
режиму
![]() ,
,
або
![]() ,
,
де W - питомий протидіючий момент, що залежить від властивостей пружного елемента.
Отже,
кут повороту котушки ![]() пропорційний струму
пропорційний струму ![]()
![]()
де S - чутливість вимірювального механізму.
Як видно з (5.4) при зміні напрямку струму в котушці міняється на зворотне й напрямок відхилення рухливої частини й покажчика (стрілки).
Для одержання відхилення покажчика в потрібну сторону необхідно при включенні приладу дотримувати зазначену на приладі полярність.
Достоїнства приладів магнітоелектричної системи: висока чутливість до вимірюваної величини, висока точність (клас точності до 0,05, мале споживання потужності, мала чутливість до зовнішніх магнітних полів). Недолік - можливість застосування тільки в колах постійного струму.
У приладах електромагнітної системи в нерухомій котушці, по якій протікає вимірюваний струм, створюється магнітне поле, у яке втягується, повертаючись на осі, феромагнітний сердечник, що намагнічується цим же полем. Причому втягування відбувається як при постійному, так і при змінному магнітному полі, а кут повороту а пропорційний квадрату сили вимірюваного струму. Тому:
а) прилади електромагнітної системи можуть застосовуватися в колах постійного і змінного струмів;
б) шкала приладу нерівномірна, сильно стисла в початковій частині.
Переваги електричних вимірювальних приладів електромагнітної системи: простота й надійність конструкції, невелике споживання потужності.
Недоліки: невисока чутливість до вимірюваної величини, відносно низька точність (клас точності до 1.0), більша чутливість до зовнішніх магнітних полів.
Обертаючий момент електромагнітного вимірювального механізму
Якщо протидіючий момент створюється за допомогою пружних елементів, то для режиму сталого відхилення
![]()