1.Векторный способ задания движения точки
В этом случае положение точки на плоскости или в пространстве определяется вектором-функцией
r=r(t) (1.1)
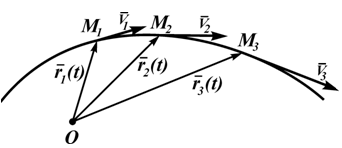
Рисунок 1.1
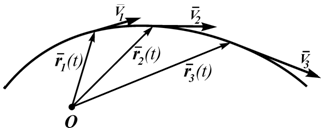
Этот вектор откладывается от неподвижной точки, выбранной за начало отсчета, его конец определяет положение движущейся точки. Годограф r, т.е. положение концов этого вектора в пространстве, определяет траекторию движущейся точки. Ее скорость в этом случае определяется как производная от радиуса-вектора и направлена по касательной к годографуr(по касательной к траектории движения точки, рисунок 1.1):
V=dr/dt(1.2)
а
б
Рисунок 1.2
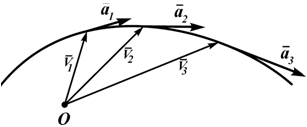
Ускорение точки (изменение ее скорости) определяется как производная от скорости:
Вектор ускорения направлен по касательной к годографу вектора скорости (рисунок 1.2, б).
2.Координатный способ задания движения точки
В выбранной системе координат задаются координаты движущейся точки как функции от времени. В прямоугольной декартовой системе координат это будут уравнения:
x=x(t)
y=y(t) (1.4)
z=z(t)
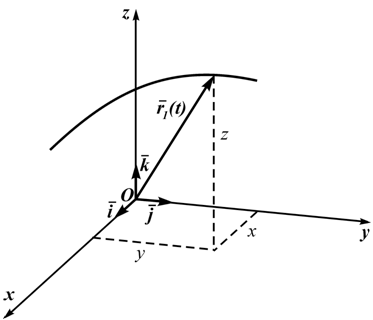
Рисунок 1.3
Эти уравнения являются и уравнениями траектории в параметрической форме. Исключая из этих уравнений параметр t, можно получить три пары систем двух уравнений, каждая из которых представляет траекторию точки, как пересечение поверхностей.
Кроме декартовых могут быть использованы другие системы координат (сферическая, цилиндрическая). Всегда можно перейти от координатного способа задания движения к векторному (рисунок 1.3):
r(t)=i⋅x(t)⊕j⋅y(t)⊕k⋅z(t) (1.5)
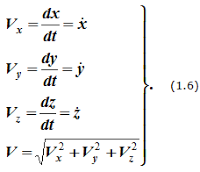
Поэтому, используя формулы для определения скорости и ускорения точки при векторном способе задания движения, можно получить аналогичные формулы для координатного способа:
![]()
То есть:
Направление вектора скорости определяется с помощью направляющих косинусов:
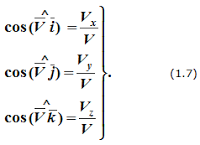
Формулы (1.6) и (1.7) полностью определяют вектор скорости при координатном способе задания движения точки, т.е. по величине и направлению.
Аналогичны формулы для определения ускорения точки:
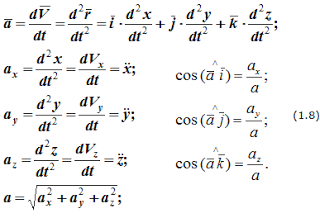
Формулы (1.8) определяют величину и направление вектора ускорения. В формулах (1.6) и (1.8) приведены используемые в различных учебниках обозначения проекций скоростей и ускорений точек на оси декартовой системы координат.
3. Естественный способ задания движения точки
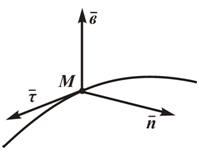
Рисунок 1.4
На рисунке 1.4:
τ-орт касательной;
n-орт нормали;
b-орт бинормали;
При естественном способе задания движения предполагается определение параметров движения точки в подвижной системе отсчета, начало которой совпадает с движущейся точкой, а осями служат касательная, нормаль и бинормаль к траектории движения точки в каждом ее положении.
Единичные орты τ, n ,bопределяют направление соответствующих осей в каждой точке кривой.
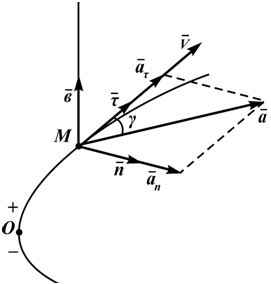
Рисунок 1.5
Чтобы задать закон движения точки естественным способом необходимо:
1) знать траекторию движения;
2) установить начало отсчета на этой кривой;
3) установить положительное направление движения;
4) дать закон движения точки по этой кривой, т.е. выразить расстояние от начала отсчета до положения точки на кривой в данный момент времени ∪OM=S(t).
Зная эти параметры можно найти все кинематические характеристики точки в любой момент времени (рисунок 1.5).
Скорость точки определяется по формулам (1.9)
V=τ⋅dS/dt, V=dS/dt. (1.9)
Первая формула определяет величину и направление вектора скорости, вторая формула только величину.
Ускорение определяется как производная от вектора скорости:
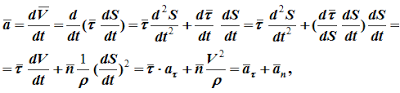
т.е. a=aτ+an. (1.10)
В формуле (1.10)

aτ=τ⋅dV/dt=τ⋅d2S/dt2, aτ=dV/dt=τ⋅d2S/dt2- касательное ускорение; оно характеризует быстроту изменения величины скорости точки;
an=n⋅V2/ρ, an=V2/ρ - нормальное ускорение точки; характеризует быстроту изменения направления вектора скорости;
ρ- радиус кривизны траектории в данной точке (например, для окружности:ρ=R , для прямой линииρ=∞ ).
Полное ускорение точки определяется следующим образом (рисунок 1.5):
![]()
Выше отмечалось, что всегда можно перейти от одного способа задания закона движения точки к другому. Поэтому, преобразовывая одни и те же формулы, можно получить другое их написание.
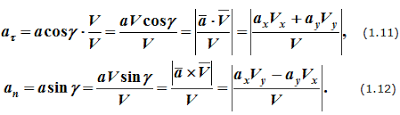
Например,

или aτ=acosγ(рисунок 1.5).
Далее