

Вопрос 2
Билет 18
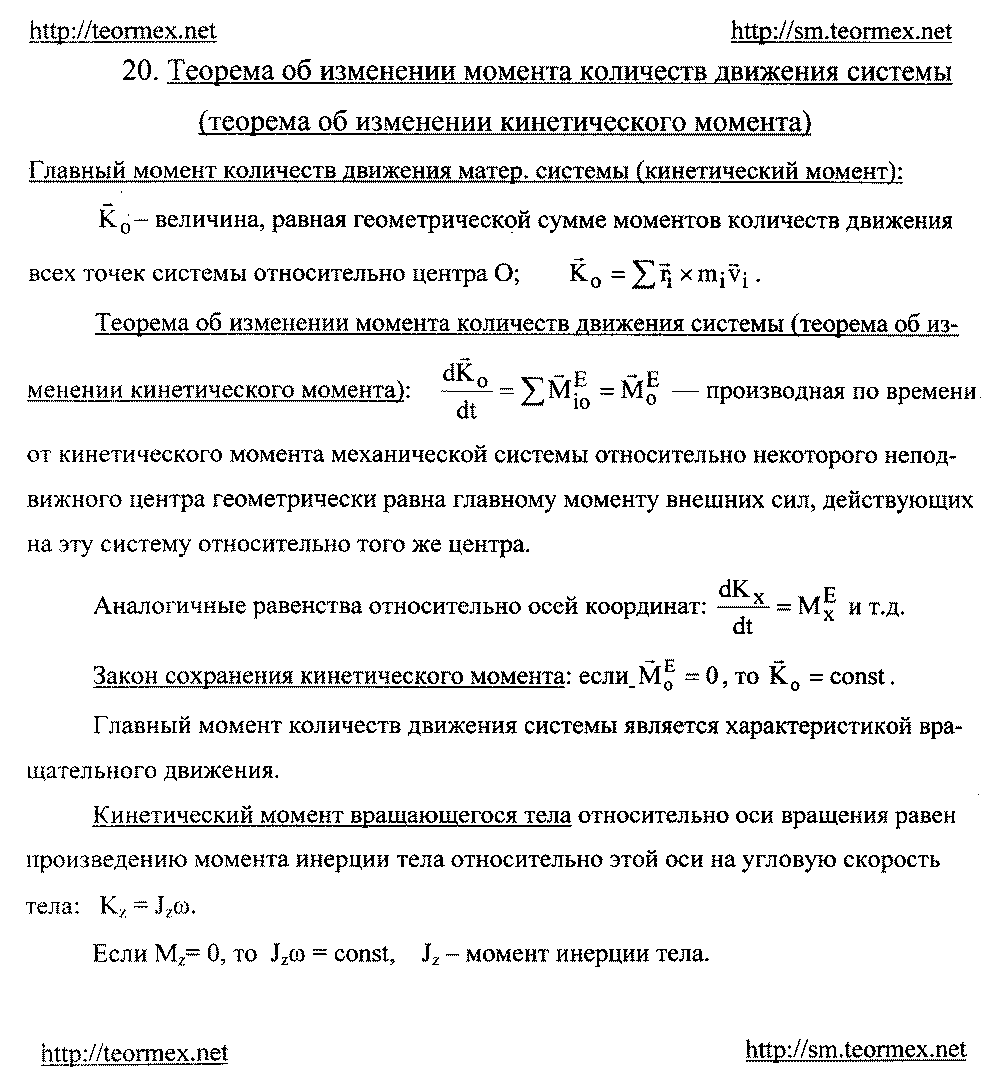
Вопрос 1
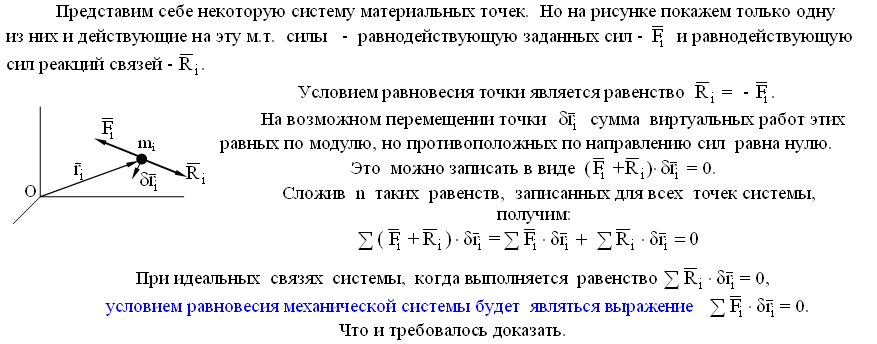
для уравновешенной системы сил уже в соответствии с принципом возможных перемещений сумма виртуальных работ сил на любом возможном перемещении системы должна быть равна нулю.

Сформулировать записанное можно следующим образом.
В любой момент движения механической системы с идеальными связями сумма виртуальных работ активных сил и сил инерции на любом возможном перемещении системы равна нулю.
Это равенство принято называть
общим уравнением динамики или принципом Лагранжа-Даламбера.
Вопрос 2
“принцип возможных перемещений”.
Этот принцип считается наиболее общим условием равновесия или равномерного движения любой механической системы. Из него можно получить все аналитические условия равновесия тела под действием системы сил, рассматриваемые в разделе “Статика”.
Формулируется принцип следующим образом:
Для равновесия механической системы с идеальными связями необходимо и достаточно,
чтобы сумма элементарных работ активных сил на любом возможном перемещении системы
была равна нулю.

Для доказательства необходимости этого условия равновесия любой находящейся в покое механической системы, разделим силы, действующие на любую точку системы, на заданные и силы реакции связей.

Билет 19
Вопрос 1
Приближенная теория
гироскопа
Гироскопом
называют тело, имеющее неподвижную
точку и вращающееся вокруг оси материальной
симметрии.
Предположим, что гироскоп
вращается с угловой скоростью вокруг
собственной оси симметрии. В этом случае
кинетический момент
![]() Это
одна из важнейших характеристик при
движении гироскопа.
Это
одна из важнейших характеристик при
движении гироскопа.
![]() В
приближенной теории гироскопа принимают,
что 1 <<
и кинетический момент гироскопа
равен
В
приближенной теории гироскопа принимают,
что 1 <<
и кинетический момент гироскопа
равен
![]() Гироскоп
с тремя степенями свободы
Гироскоп
с тремя степенями свободы способен
сопротивляться попытке изменения оси
вращения гироскопа.
Рассмотрим
гироскоп, у которого неподвижная точка
совпадает с центром масс.
Рассмотрим
сначала покоящийся гироскоп ( = 0, L = 0).
Если к гироскопу приложить силу
Гироскоп
с тремя степенями свободы
Гироскоп
с тремя степенями свободы способен
сопротивляться попытке изменения оси
вращения гироскопа.
Рассмотрим
гироскоп, у которого неподвижная точка
совпадает с центром масс.
Рассмотрим
сначала покоящийся гироскоп ( = 0, L = 0).
Если к гироскопу приложить силу ![]() ,
то очевидно, что гироскоп получит
вращательное движение и упадет (т.е. ось
гироскопа будет поворачиваться в
плоскости чертежа).
Рассмотрим
вращающийся (быстро) гироскоп. Прикладываем
силу
,
то очевидно, что гироскоп получит
вращательное движение и упадет (т.е. ось
гироскопа будет поворачиваться в
плоскости чертежа).
Рассмотрим
вращающийся (быстро) гироскоп. Прикладываем
силу ![]() .
По
теореме об изменении кинетического
момента
.
По
теореме об изменении кинетического
момента
![]() Момент
перпендикулярен к плоскости чертежа,
тогда
Момент
перпендикулярен к плоскости чертежа,
тогда
 Если
к оси гироскопа прикладывается сила,
то ось гироскопа смещается перпендикулярно
действующей силе по направлению
вращающего момента.
Если действие
силы прекращается, то ось вращения
гироскопа останавливается. ^ Говорят,
что гироскоп способен противодействовать
действию внешних сил.
Рассмотрим
случай регулярной прецессии.
Имеется
гироскоп, у которого центр масс не
совпадает с неподвижной точкой.
На
тело действует сила
Если
к оси гироскопа прикладывается сила,
то ось гироскопа смещается перпендикулярно
действующей силе по направлению
вращающего момента.
Если действие
силы прекращается, то ось вращения
гироскопа останавливается. ^ Говорят,
что гироскоп способен противодействовать
действию внешних сил.
Рассмотрим
случай регулярной прецессии.
Имеется
гироскоп, у которого центр масс не
совпадает с неподвижной точкой.
На
тело действует сила ![]() Допустим OC = h,
тогда
Допустим OC = h,
тогда
![]() Отметим:
Под
действием силы тяжести ось гироскопа
будет вращаться вокруг вертикальной
оси z.
Такое явление называется регулярной
прецессией.
Введем угловую скорость 1 –
это угловая скорость, с которой ось
гироскопа вращается вокруг оси z,
ее еще называют “угловая скорость
прецессии”.
Отметим:
Под
действием силы тяжести ось гироскопа
будет вращаться вокруг вертикальной
оси z.
Такое явление называется регулярной
прецессией.
Введем угловую скорость 1 –
это угловая скорость, с которой ось
гироскопа вращается вокруг оси z,
ее еще называют “угловая скорость
прецессии”.
 Движение
юлы – очень хороший пример движения
гироскопа.
Гироскоп с тремя степенями
свободы находит широкое применение в
современных системах ориентирования
(гирокомпас, гирогоризонт …).
Движение
юлы – очень хороший пример движения
гироскопа.
Гироскоп с тремя степенями
свободы находит широкое применение в
современных системах ориентирования
(гирокомпас, гирогоризонт …).