

Глава 6. Устойчивость линейных систем автоматического управления
6.1. Понятия и условия устойчивости
При проектировании системы управления ключевой проблемой является обеспечение её устойчивости, т.к. устойчивость является важнейшей характеристикой любой САР. С практической точки зрения неустойчивая система не имеет никакого смысла, т.к. только устойчивая система работоспособна.
Любая система управления испытывает внешние воздействия. Эти воздействия имеют различный характер и природу (задающие, возмущающие...). Всякие воздействия стремятся вывести систему из исходного состояния равновесия. Устойчивая система при этом переходит в новое устойчивое состояние равновесия.
Следовательно, под устойчивостью можно понимать свойство системы возвращаться в исходный или близкий к нему установившийся режим после всякого выхода из него в результате какого-либо воздействия.
Замкнутая САР из-за наличия обратных связей склонна к неустойчивой работе. В процессе регулирования часть энергии с выхода передаётся на вход группы звеньев системы, среди которых могут быть и колебательные звенья. При работе системы в этом случае могут возникнуть колебания регулируемой величины и её отклонение от заданного значения. Наличие главной обратной связи будет способствовать поддержанию колебательного процесса и при больших коэффициентах усиления. Если параметры системы не обеспечивают необходимого затухания (рассеивания) энергии колебаний, то это может привести к неустойчивой работе, характеризуемой возрастанием амплитуды колебаний.
В устойчивых системах энергия колебаний с течением времени уменьшается, стремясь рассеяться в виде тепловой энергии, а колебания регулируемой величины, возникшие в результате возмущения, затухают. Следовательно, в результате возмущающих воздействий и следующих за ними регулирующих воздействий регулятора, в системе возникают переходные процессы.
При этом могут иметь место три вида переходных процессов.
1. Сходящийся переходный процесс (рис 6.1, а), когда регулируемая величина, отклонившись под действием возмущающих воздействий от заданного значения, с течением времени под воздействием регулятора возвращается к заданному значению. Система, имеющая такой переходный процесс, будет называться устойчивой.
2. Расходящийся переходный процесс (рис. 6.1 ,б) когда регулируемая величина, отклонившись под действием возмущающих воздействий от заданного значения, с течением времени беспредельно удаляется от заданного значения. Этот процесс может быть апериодическим (кривая 1)
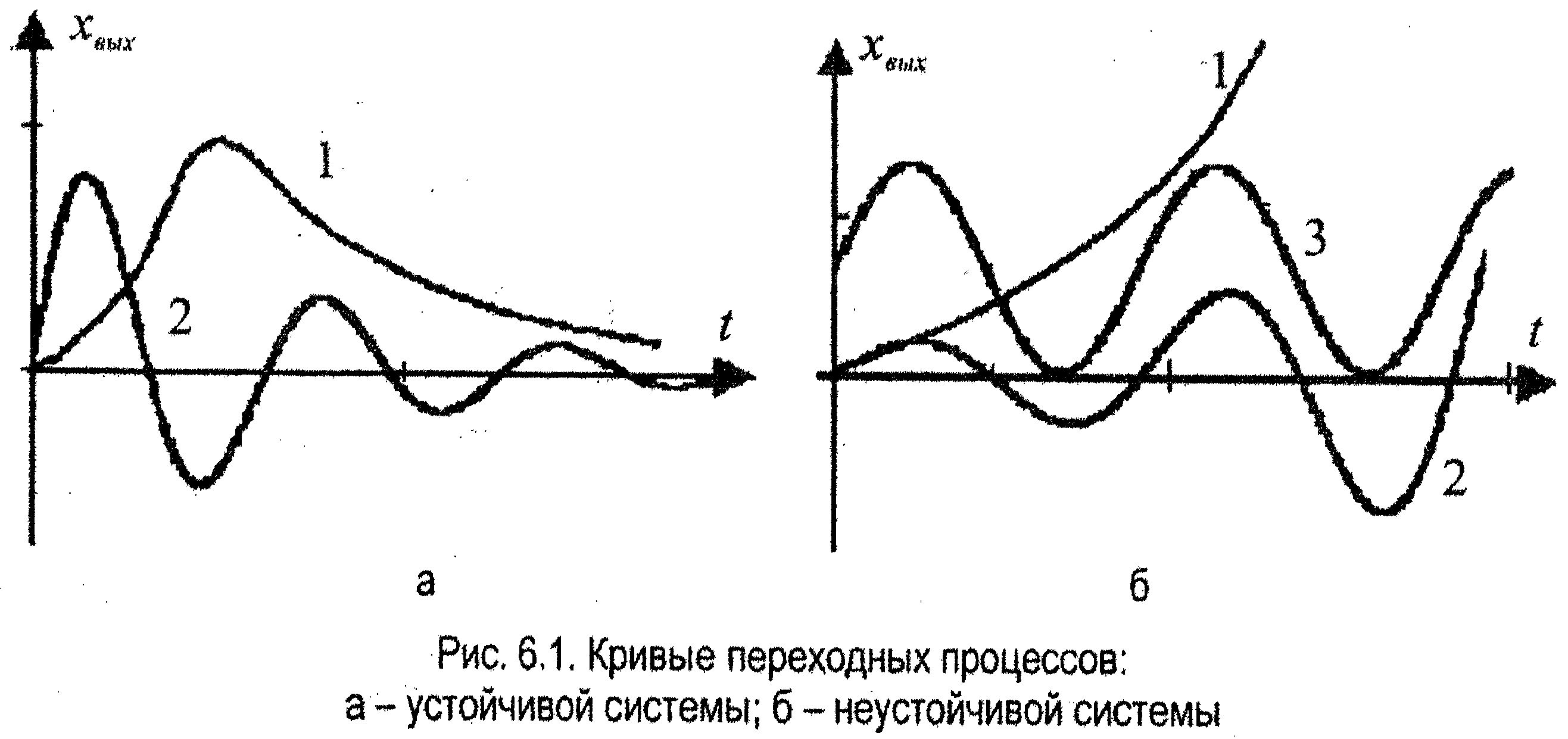
или колебательным (кривая 2). Система, имеющая такой переходный процесс, будет неустойчивой.
3. Апериодический расходящийся процесс может возникнуть в САУ, если вместо отрицательной обратной связи, например, ввести ошибочно положительную обратную связь. В этом случае будет возникать лавинообразное изменение регулируемой величины. Колебательный переходный процесс может наступить, например, при неограниченном увеличении коэффициента усиления системы, что будет вызывать энергичное воздействие регулятора на объект и расходящийся колебательный процесс.
В реальных условиях не может произойти беспредельное отклонение какого-либо физического параметра от заданного значения, также как и невозможны колебания с беспредельно возрастающей амплитудой из-за насыщения элементов, ограниченной мощности элементов и др.
4. Колебательный установившийся переходный процесс (см. рис. 6.1, б, кривая 3), когда регулируемая величина, отклонившись в результате возмущающих воздействий от заданного значения, с течением времени к установившемуся значению не возвращается, а совершает незатухающие колебания с амплитудой, зависящей от начальных условий. Линейная САР в этом случае находится на границе устойчивости.
Рассмотрение понятия устойчивости определяет устойчивость установившегося режима системы. Но система может работать в условиях непрерывно изменяющихся воздействий, когда установившийся режим вообще отсутствует.
В этом случае можно дать следующее определение устойчивости:
система устойчива, если её выходная величина остаётся ограниченной в условиях действия на систему ограниченных по величине возмущений
или иначе
устойчивая система - это динамическая система, обладающая ограниченной реакцией на ограниченный входной сигнал.
Нетрудно показать, что если переходный процесс в системе является затухающим, то система будет удовлетворить и последнему определению.
Чтобы определить устойчиво ли равновесие какой-либо статической системы, изучают её поведение при малых отклонениях от положения равновесия. Устойчивость системы при бесконечно малых отклонениях называется устойчивостью в малом. Часто системы, устойчивые в малом, оказываются устойчивыми и при конечных, достаточно больших, отклонениях, т.е. система оказывается устойчивой в большом.
При исследовании САР рассматривают устойчивость в малом, т.е. поведение системы при малых отклонениях регулируемой величины от установившегося значения. В линейных системах устойчивость в малом обеспечивает устойчивость и в большом.
Понятие «устойчивость» в математической трактовке впервые ввёл в науку русский учёный A.M. Ляпунов (1892 г.). Он дал стройную и законченную постановку задачи об устойчивости движения и методы её решения.
A.M. Ляпуновым были сформулированы следующие теоремы:
Теорема первая. Если вещественные части всех корней характеристического уравнения первого приближения отрицательны, то
система будет устойчива, независимо от членов разложения выше первого порядка малости.
Теорема вторая. Если среди корней характеристического уравнения первого приближения найдётся, по меньшей мере, один с положительной вещественной частью, то система будет неустойчивой, независимо от членов разложения выше первого порядка малости.
Пусть, например, свободное движение линейной САР, выведенной малым отклонением из состояния равновесия, описывается дифференциальным уравнением замкнутой системы
 (6.1)
(6.1)
Т.е. в общем случае передаточная функция линейной САР
 (6.2)
(6.2)
где n≥т.
Первая часть дифференциального уравнения определяется внешними воздействиями. Об устойчивости системы можно судить по переходному процессу при приложении внешних воздействий
 (6.3)
(6.3)
Для устойчивых систем правая часть уравнения определяет значение регулируемой координаты у в статическом режиме.
Свободная составляющая

где ci - постоянная интегрирования;
pi - корни характеристического уравнения.
Вынужденная составляющая (при p=0) определится

Характеристическое уравнение системы
 (6.4)
(6.4)
Характеристическое уравнение или характеристический полином - это знаменатель передаточной функции по задающему, возмущающему воздействию или по ошибке регулирования.
Вынужденная составляющая представляет собой частное решение уравнения, является полезной составляющей регулируемой величины. Она характеризует установившийся режим системы. Переходная или свободная составляющая является решением однородного дифференциального уравнения и имеет место в переходном режиме. Эта составляющая по существу представляет ошибку системы в переходном режиме (отклонение системы от равновесного состояния) и поэтому является нежелательной составляющей регулируемой величины. Переходная составляющая (решение однородного уравнения) в случае некратных корней может быть представлена в виде следующей суммы:
 (6.5)
(6.5)
Очевидно, что система будет устойчивой, если переходная составляющая yсв(t) в ней стечением времени затухает, т.е. решение уравнения (6.5) должно удовлетворять требованию
 (6.6)
(6.6)
Если же yсв(t) при t→∞ не стремится к нулю, а возрастает или представляет незатухающие колебания, то система неустойчива.
Из формулы (6.6) видно, что затухание yсв(t) т.е. устойчивость системы, зависит от значения корней p1, р2,…, рn характеристического уравнения замкнутой системы (6.4).
Возможны
следующие случаи: