

Процесс ортогонализации
Теорема 8.12. Во всяком n-мерном евклидовом пространстве существует ортонормированный базис.
Доказательство. Пусть а1, а2, …, аn – произвольный базис евклидова пространства Е. Доказательство заключатся в описании алгоритма построения ортогонального базиса по данному базису. Этот алгоритм называется процессом ортогонализации. Пусть b1 = a1, b1 ≠ 0 (т. к. а1 ≠ 0). Положим b2 = a2 + 1b1. Подберем коэффициент 1 так, чтобы b2 ≠ 0 стал ортогонален b1;
(b1, b2) = 0
(b1, a2 + 1b1) = 0
(a2 + 1b1, b1) = 0
(a2, b1) + 1(b1, b1) = 0,
т. к.
b1 ≠ 0,
то
(b1, b1) ≠ 0
1 = ![]() .Вектор
b2
не равен нулю, поскольку он является
ненулевой линейной комбинацией линейно
независимых векторов a1
и a2.
.Вектор
b2
не равен нулю, поскольку он является
ненулевой линейной комбинацией линейно
независимых векторов a1
и a2.
Положим,
далее b3 = a3 + 1b1 + 2b2.
Подберем 1
и 2
так, чтобы b3 ≠ 0
оказался ортогонален b1
и b2,
для чего должны выполняться условия
(b1, b3) = 0,
(b2, b3) = 0.
Выполняя преобразования, получим, что
1 = ![]() ,
2 =
,
2 = ![]() .
Вектор
b3
не равен нулю, поскольку он является
ненулевой линейной комбинацией векторов
а1,
а2,
а3.
.
Вектор
b3
не равен нулю, поскольку он является
ненулевой линейной комбинацией векторов
а1,
а2,
а3.
Продолжая этот процесс, получим систему векторов b1, b2, …, bn, и так как эти векторы ненулевые и попарно ортогональны, то по теореме 8.11 они линейно независимы, а значит образуют ортогональный базис.
Нормируя ортогональный базис b1, b2, …, bn, получим ортонормированный базис n-мерного евклидова пространства:
e1 = ![]() b1,
e2 =
b1,
e2 = ![]() b2,
…, en =
b2,
…, en = ![]() bn.
bn.
Пример 8.12. Применить процесс ортогонализации к векторам а1 = (2, –2, –2, 2), а2 = (3, –1, –1, 3), а3 = (2, –2, 0, 4).
Решение. Это задание можно сформулировать так: по данному базису подпространства построить ортогональный базис.
b1 = а1, b1 = (2, –2, –2, 2);
b2 = a2 + 1b1,
1 = ![]() =
=![]() =
=![]() = –1.Тогда
b2 = a2 – b1 = (1,
1, 1, 1).
= –1.Тогда
b2 = a2 – b1 = (1,
1, 1, 1).
b3 = a3 + 1b1 + 2b2,
1 = ![]() =
=![]() = –1,2 =
= –1,2 = ![]() =
=![]() = –1.Тогда
b3 = a3 – b1 – b2 = (–1,
–1, 1, 1).
= –1.Тогда
b3 = a3 – b1 – b2 = (–1,
–1, 1, 1).
Скалярное произведение в ортонормированном базисе
Дан ортонормированный базис e1, e2, …, en евклидова пространства V. Поскольку (ei, ej) = 0 при i ≠ j и (ei, ei) = 1, то
(x,
y) = ![]() (ei, ej) = x1y1 + x2y2 + … + xnyn.
(ei, ej) = x1y1 + x2y2 + … + xnyn.
Вывод: скалярное произведение векторов в ортонормированном базисе равно сумме произведений соответствующих координат.
Ортогональное дополнение подпространства
V – евклидово векторное пространство, L – его подпространство.
Определение 8.23. Говорят, что вектор а ортогонален подпространству L , если вектор а ортогонален любому вектору из подпространства L, т. е.
а L а х, х L.
Определение 8.24. Ортогональным дополнением подпространства L называется множество L* всех векторов, ортогональных подпространству L, то есть L* = {x | x L}.
Теорема 8.13. Ортогональное дополнение подпространства является подпространством.
Теорема 8.14. Прямая сумма подпространства L и его ортогонального дополнения L* равна пространству V, т. е. L L* = V.
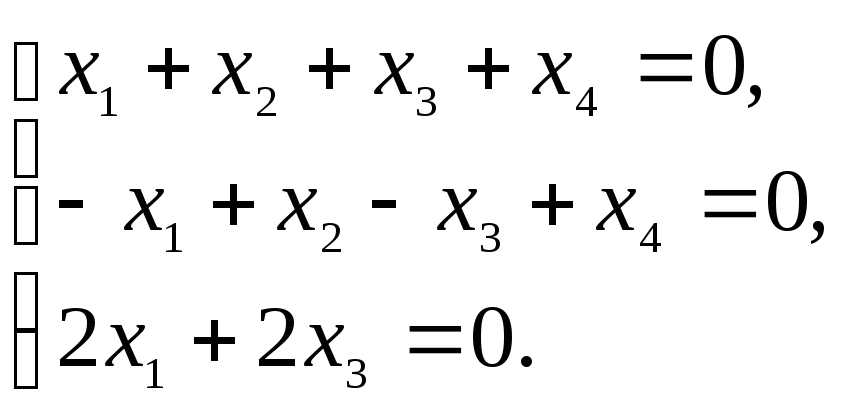
Пример 8.13. Найти ортогональное дополнение подпространства L, натянутого на векторы а1 = (1, 1, 1, 1), а2 = (–1, 1, –1, 1), а3 = (2, 0, 2, 0).
Решение.
Для того чтобы вектор x
был ортогонален подпространству,
необходимо и достаточно, чтобы он был
ортогонален векторам системы образующих
этого подпространства. Пусть
х = (х1, х2, х3, х4),
запишем условие ортогональности этого
вектора векторам а1,
а2,
а3:
(х,
а1) = 0,
(х, а2) = 0,
(х,
а3) = 0.
В координатной форме эти условия
представляют собою однородную систему
линейных уравнений:
 Множество
решений этой системы представляет собою
подпространство L*,
ортогональное подпространству L.
Множество
решений этой системы представляет собою
подпространство L*,
ортогональное подпространству L.
Решая систему, получим фундаментальный набор решений: с1 = (–1, 0, 1, 0), с2 = (0, –1, 0, 1). Эти векторы образуют базис множества решений системы, то есть базис L*, т. о. L* = L(с1,с2), dim L* = 2.