

Лекция 5
.pdfЛекция 5.
Обзор проблем, связанных с тестированием микропроцессорных систем
5.1 Проблемы тестирования микропроцессорных систем.
Процедура контроля МПС состоит из разработки тестовой программы, генерации входных воздействий, наблюдения выходных реакций и анализа полученных результатов с целью установления работоспособности контролируемой системы.
Существуют два подхода к созданию тестовой программы, в соответствии с этим различают два вида контроля: функциональный и структурный. При функциональном контроле в качестве исходной информации для построения тестовой программы используется алгоритм функционирования МПС. Функциональный контроль, как правило, не позволяет выявить значительную часть возможных неисправностей и их характера при повышенной сложности контролируемой системы или низких требованиях к полноте контроля.
При структурном контроле в процессе разработки тестовой программы используются данные о структуре МПС и характере возможных неисправностей. Структурный контроль, как правило, обеспечивает достаточно полную проверку работоспособности цифровых устройств. Однако для МПС методы структурного контроля малоэффективны из-за большого числа элементов схемы и отсутствия адекватных моделей ряда, характерных для МПС неисправностей.
В зависимости от детализации объекта контроля при разработке тестовой программы различают системный и модульный методы контроля.
При системном подходе МПС рассматривается как единое устройство, для которого разрабатывается тестовая программа.
При модульном контроле МПС рассматривается как совокупность входящих в неё функциональных узлов (модулей), для каждого из которых разрабатывается своя тестовая программа. Затем эти программы объединяются в программу проверки всей системы. Процедуру построения тестовых программ для отдельных модулей, как правило, значительно проще, чем для МПС в целом. Однако следует отметить, что работоспособность всех частей системы не гарантирует работоспособности системы в целом.
Как при системном, так и при модульном подходах к построению тестовых программ могут использоваться и функциональные и структурные методы.
Для формализации методов построения тестовых программ требуется разработка математических моделей МПС и возникающих в них неисправностей. Основные причины, препятствующие разработке таких моделей, следующие:
1.Большое разнообразие микропроцессорных БИС (МПБИС), отличающихся технологией изготовления, структурной организацией, функциональными возможностями, назначением и т. п., что затрудняет получение единой для всех МП модели неисправностей.
2.Высокая степень интеграции МП БИС, приводящая к появлению неисправностей, связанных с взаимным влиянием элементов схемы, что препятствует использованию традиционных методов построения моделей цифровых устройств.
3.Сравнительно малое, по отношению к цифровым устройствам на ИС малой интеграции, число точек МПС, физически доступных для подключения контрольной аппаратуры. Это затрудняет разбиение МПС на отдельные модули, описываемые достаточно простыми математическими моделями, а также усложняет подачу на эти модули тестовых воздействий и наблюдение выходных реакций.
4.Тесная связь аппаратуры и программного обеспечения, что требует учёта в моделях неисправностей влияния программного обеспечения, так как отказами аппаратуры, так и ошибками в программе или совокупностью этих причин.
5. Жёсткие ограничения на временные соотношения между электрическими сигналами в МПС, нарушение которых может приводить к сбоям, что ведёт к усложнению модели неисправностей.
По этим причинам процесс построения адекватной модели МПС до настоящего времени не завершён, что приводит к использованию эмпирических и эвристических методов при разработке тестовых программ.
5.2 Особенности организации микропроцессорных систем.
Микропроцессорные системы (МПС) ставят уникальные проблемы поиска неисправностей, что объясняется их организацией и структурой. Как и в других электронных системах, компоненты микропроцессорных систем по разным причинам отказывают, что приводит к частичному или полному выходу системы из строя. Их архитектура часто превращает поиск неисправного компонента в сложную и длительную процедуру.
Значительная часть компонентов МПС реализована на больших интегральных схемах (БИС), благодаря которым законченные подсистемы МПС поставляются в виде готовых блоков . Примером такого блока в виде БИС служит сам микропроцессор. По мере всё большего уплотнения элементов в БИС проблемы их функционального тестирования резко усложняются. Любая БИС до поставки подвергается лишь ограниченному тестированию, а отказы могут проявиться при эксплуатации из-за возникновения комбинаций сигналов, или таких изменений некоторого параметра компонента, которые вызывают нехарактерное поведение микросхемы.
Когда микросхема спроектирована и изготовлена, внутренняя топология микросхемы может вызвать эффект так называемой "чувствительности к набору", заключающейся в том, что определённый двоичный набор приводит к неправильной работе. Маловероятно, чтобы такой набор появился в тестах при производстве, его действие появляется только в условиях эксплуатации. Драйверы выходных линий обычно размещаются на периферии кристалла, а по условиям работы они рассеивают большую мощность по сравнению с другими элементами схемы. Находящиеся вблизи драйверов маломощные схемы могут изменить свои характеристики в связи с повышением температуры. Следовательно, через некоторое время после подачи питания поведение микросхемы может стать непредсказуемым.
Правильная работа МПС требует исправных аппаратных средств и безошибочного программного обеспечения. Часто это не так, и программы, считавшиеся полностью работоспособными, в определённых обстоятельствах могут давать неправильные результаты. Программа может работать правильно на конкретных тест-наборах, но отказывать при эксплуатации из-за получения непредвиденного набора кода, который она не может обработать. Такие ситуации возникают в тех программах, которые вследствие плохой конструкции не допускают ввода информации неопытным оператором, что приводит к кажущемуся отказу системы.
Кроме таких видов отказов имеются и отказы, возникающие в системе после некоторого срока эксплуатации. В общем случае они вызываются электрическими отказами из-за неисправностей компонентов или, что происходит гораздо реже, программными отказами из-за искажения хранимых в памяти кодов команд.
Двойственная природа вычислительной системы при возникновении отказа сразу же ставит следующую проблему. Если отказ не очевиден, исследователь должен решить, скрыт отказ в аппаратных средствах или вызван ошибкой в программе. На этот вопрос часто ответить не так просто, так как характер отказа может препятствовать выполнению простых диагностических тестов. Отказ в шине управления микропроцессора может препятствовать выполнению любой программы, а отказ в операционной системе может не допустить загрузку и выполнение тест-программы.
В любой момент времени полное состояние микропроцессорной системы определяется уровнями сигналов на множестве линий. В 8-битном микроконтроллере текущий
адрес представлен состояниями 16 параллельных линий шины адреса. В то же время данные, которые считываются или записываются по этому адресу, являются двоичным кодом на 8 параллельных линиях шины данных. Для определения типа выполняемой операции необходимо также знать состояния нескольких линий шины управления. Следовательно, для получения всей информации о передаче по шине данных должны быть известны состояния многих линий. Любой "кусочек" информации обычно существует на шине только в течение очень короткого временного интервала. Байт считываемых из памяти данных помещается на шину данных только на один период системной синхронизации длительности, например, 250 нс.
5.3 Особенности построения памяти в микропроцессорных системах.
Память микропроцессорной системы физически реализуется на основе различных запоминающих устройств (ЗУ).Технико-экономическая целесообразность ведет к построению иерархической памяти на основе полупроводниковых постоянных и оперативных запоминающих устройств
Имеются два типа полупроводниковых ЗУ: ОЗУ и ПЗУ [3]. Каждый из них имеет множество разновидностей. Общей особенностью для этих устройств является то что стимулирование входов (выбор кристалла и адрес) приводит к появлению информации на выходе (шина данных). Разницей является то, что, у ОЗУ, в отличие от ПЗУ, есть ещё два управляющих сигнала: чтение и запись которые позволяют не только считывать программы и данные из памяти, но и ещё и оперативно сохранять их в ней. К недостаткам же ОЗУ относится то, что при отключенном питании информация в них теряется.
Стандартная микросхема памяти имеет элементарную ячейку в один байт, которая адресуется одним адресом.
ОЗУ используются в программной части памяти пользователя для запоминания данных почти во всех микропроцессорных системах. Существует два типа ОЗУ: статические и динамические. Статические ОЗУ используют триггер для каждого элемента памяти, поэтому ОЗУ с объемом в 1К имеют 1024 триггера. Каждый триггер может устанавливаться для запоминания лог.1 и сбрасывается для запоминания лог.0. Схемы дешифрации адреса внутри кристалла ОЗУ выбирают определённый триггер, указываемый адресными линиями. Состояние триггера не изменяется до тех пор, пока он не будет заполнен новыми данными или же не прервётся питание ОЗУ.
В динамических ОЗУ для хранения информации используется конденсатор. В конденсаторе запоминается заряд, индицирующий лог.1, отсутствие заряда индицирует лог.0. Этот метод проще, однако, конденсатор может потерять свой заряд, и через несколько микросекунд лог.1 может стать лог.0. Поэтому заряды должны регенерироваться. Регенерирование заключается в считывании последовательности адресных ячеек ОЗУ за определённое время. В процессе считывания данных кристалл ОЗУ автоматически переписывает ту же самую информацию в считываемую ячейку. В результате все лог.1 восстанавливаются до полного заряда, а все лог.0 - до полного отсутствия заряда. Динамические ЗУ обычно регенерируют, по крайней мере, каждые 2 мкс.
Из-за необходимости постоянного восстановления информации системы с динамическим ЗУ должны усложняться дополнительными специальными схемами. Но динамические ЗУ более дёшевы и потребляют меньшую мощность по сравнению со статическим ЗУ такого объема. Поэтому, статические ЗУ обычно используются лишь в небольших системах, тогда как большие ОЗУ строятся на динамических ЗУ.
В ПЗУ хранится постоянная информация. ОЗУ из-за того, что они теряют своё содержимое при отключении питания, не подходят для запоминания постоянных программ.
Существуют четыре различных типа ПЗУ. ПЗУ, программируемые масками, выполняются изготовителями интегральных схем. Такие ПЗУ часто используются в приборах, выпускаемых в больших объемах. Это объясняется тем, что они более дёшевы и имеют больший объём памяти на одном кристалле. Вторым типом является ППЗУ. Пользователь электрически программирует ПЗУ, используя специальное устройство, называемое
программатором ППЗУ. Эти ППЗУ не могут перепрограммироваться. Существуют также стираемые ППЗУ, подобные ПЗУ. Данные в них могут стираться и перепрограммироваться. Программируемые биты запоминаются как заряд конденсатора с нулевой утечкой.
Имеются также ПЗУ, где стирание выполняется ультрафиолетовым облучением через окошко в корпусе микросхемы. Эти устройства наиболее удобны для приборов, выпускаемых небольшими объёмами.
Самым новым типом ППЗУ является электрически изменяемое ППЗУ, данные в котором могут электрически стираться в схеме. Достоинством такого типа ЗУ по сравнению со стираемым ППЗУ является то, что могут стираться небольшие секции. Электрически изменяемые ПЗУ не так легко использовать, как стираемые ПЗУ, кроме того, они являются более дорогостоящими. Множество систем, требующих запоминания данных на длительный период времени, используют электрически изменяемые ПЗУ, но они должны время от времени восстанавливать эти данные.
В диагностируемой микропроцессорной системе К580 ОЗУ построено с использованием статического ЗУ емкостью 1К бит. Оно построено на МДП БИС ЗУ К565РУ2 с организацией 1К*1 битов. Чтобы построить 8-разрядное слово, надо взять 8 таких ЗУ. ПЗУ реализовано на двух биполярных микросхемах ППЗУ КР556РТ5 с организацией 512*8 битов. Предусмотрена возможность увеличения емкости до 1,5К байта, для чего необходимо добавить 1 микросхему в адаптер для ППЗУ. 768 байтам ПЗУ ( в которой записана программа монитора) отводятся адреса от 0000 до 002F. Информация в этой области не может быть изменена пользователем с помощью перезаписи. Для изменения его содержимого необходимы новые микросхемы ППЗУ с занесенной в них постоянной программой пользователя, которая в этом случае будет играть роль монитора системы. Если же пользователю нужно расширить функции системы без изменения уже заложенных в нее возможностей, то его дополнительная постоянная программа может располагаться по адресам от 0300 до 03FF.
Микроконтроллеры семейства 68HC08/908 реализуются на основе Гарвардской архитектуры, использующей отдельную память для хранения программ и данных [9]. Для хранения программ в различных типах микроконтроллеров применяется либо масочнопрограммируемое ПЗУ (ROM), либо однократно-программируемое ПЗУ (PROM), либо электрически репрограммируемое ПЗУ (EPROM, EEPROM или Flash). Внутренняя память программ обычно имеет объем от нескольких единиц до десятков Кбайт. Для хранения данных используется регистровый блок, организованный в виде нескольких регистровых банков, или внутреннее ОЗУ. Объем внутренней памяти данных составляет от нескольких десятков байт до нескольких Кбайт. Некоторые типы 8-разрядных микроконтроллеров позволяют, в случае необходимости, подключать дополнительную внешнюю память команд и данных объемом до 64–256 Кбайт. В частности, микроконтроллер 68HC908GP32 имеет Flash-память емкостью 32 Кбайт, ОЗУ данных емкостью 512 байт.
5.4 Методы диагностики микропроцессорных систем.
На сегодняшний день существуют два основных вида диагностики, различающихся способами получения информации об ошибке: аппаратная и программная диагностика Основной недостаток аппаратного контроля - значительное количество увеличения общего объёма аппаратуры МПС и, следовательно, стоимости. Однако, этот метод контроля обладает и существенным достоинством - минимальным временем контроля. Программные методы диагностики могут применяться в процессе решения задачи, они не требуют дополнительного оборудования, но существенно снижают производительность МПС. Разумеется, существует и комбинированный программно - аппаратный контроль, обладающий достоинствами обоих методов контроля.
Особый интерес представляют специальные методы программного контроля - диагностические тесты, которые служат для локализации места отказа и определения неисправного элемента.
Основными аппаратными средствами диагностики микроконтроллеров и микропроцессорных систем являются логические и сигнатурные анализаторы, осциллографы смешанных сигналов. Аппаратные средства должны обладать следующими возможностями:
-регистрировать последовательности логических состояний в различных точках системы и на протяжении значительного временного интервала;
-регистрировать эти последовательности в связи с редкими (однократными) появлениями заданных комбинаций логических состояний;
Регистрировать состояния контрольных выходов в интервале времени, предшествующем выбранному событию;
Оперативно представлять результаты измерений, в различных форматах, удобных для потребителя информации.
Эти возможности реализуются в логических анализаторах (ЛА), создаваемых на базе стандартных серий ИМС с большим быстродействием и памятью большой емкости. ЛА являются контрольно-измерительными приборами, предназначенными для измерений потоков двоичных данных и представления их человеку на различных уровнях абстракции. Логические анализаторы характеризуются число каналов, емкостью памяти на канал, частотой записи, способами синхронизации и запуска, формами представления данных.
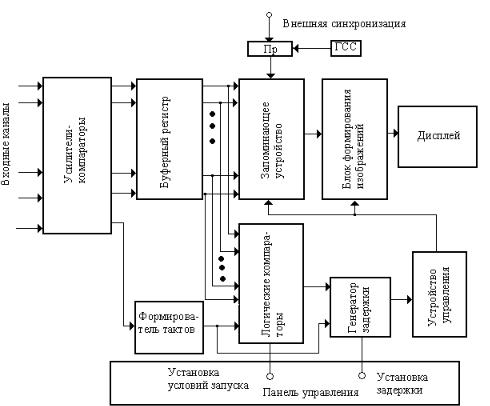
Обобщенная структурная схема ЛА представлена на рис 5.1.
Рис.5.1
Он состоит из четырех основных блоков: входных усилителейкомпараторов, управления, регистрации и индикации – и имеет три режима работы – настройки, регистрации и индикации.
В режиме настройки оператор должен подключиться к контрольным точкам цифрового устройства. Для этого анализаторы снабжаются специальными щупами и зажимами. Основное требование – минимизация влияния прибора на испытуемое устройство. ЛА должны обладать высоким входным сопротивлением (примерно 1 МОм) и малой входной емкостью (порядка 1025 пФ). Для обеспечения этих требований компараторы логических уровней делаются выносными.
В режиме регистрации сигналы с контрольных точек поступают на входные уси- лители-компараторы, пороговый уровень которых определяется элементной базой МПС. Сформированный компараторами уровней набор значений сигналов подается на входы запоминающего устройства (ЗУ) и логического компаратора (ЛК). Логический компаратор предварительно настраивается (программируется) на обнаружение определенной последовательности наборов значений сигналов. После поступления запрограммированной последовательности входных наборов ЛК выдает сигнал генератору задержки, последний по истечении запрограммируемого времени выдает сигнал на устройство запуска (УЗ), которое инициирует или прекращает запись наборов значений входных сигналов в ЗУ. Основные характеристики ЛА определяют разрядность, объем и быстродействие ЗУ блока регистрации. Запись информации в ЛА происходит по тактовым сигналам. В том случае, когда тактовые сигналы поступают от внутреннего генератора независимо от испытуемого объекта, реализуется асинхронный режим записи данных. Если для синхронизации работы ЛА используются сигналы испытуемого объекта, то реализуется синхронный режим записи данных. При этом значения могут записываться фронтом или срезом тактового сигнала. Выборочная запись информации реализуется с помощью квалификаторов – отдельных каналов, не фиксируемых в памяти, но определяющих возможность записи входных данных в память. Это позволяет экономить объем свободной памяти. В реальных системах могут возникать импульсы и всплески, длительность которых меньше длительности тактового сигнала. Такие ложные сигналы считаются помехами. Существует два способа обнаружения помех: увеличение тактовой частоты в асинхронном режиме и применение «ловушек». В первом случае помехи фиксируются и визуализируются как данные, во втором случае помехи фиксируются отдельно от основных данных и визуализируются не как биты данных, а как ложные сигналы.
Основное разнообразие в семейство логических анализаторов вносят способы запуска и формы представления данных. В соответствии с сегодняшними требованиями можно разделить ЛА на несколько типов. Фирма Tektronix выделяет два основных типа: анализаторы микропроцессорных систем на программном уровне описания (embedded microprocessor software debug applica tions), называемые также анализатора мисостояний
(state analyser) и анализа торы цифровых систем на логическом и временном уровне (hardware debug applications), называемые анализаторами временных соотношений (timing analyser). Первый тип ЛА характеризуется отсутствием явной причинно-следственной связи между событием и вызванным им следствием. Причем событие и следствие намного разнесены по времени. Очень часто следствие, вызванное неисправностью, появляется много позже, чем неисправность. Поэтому основные требования для таких анализаторов – наличие разнообразных сложных механизмов запуска, позволяющих отследить причину и следствие, и большие объемы памяти, необходимые для этого. Основной задачей ЛА данного типа является фиксация логических состояний на шинах процессора с частотой, соответствующей частоте работы процессора. Целесообразнее использовать внешнюю синхронизацию процессора и синхронный режим, вследствие чего частота синхронизации будет, как правило, меньше, чем у второго типа ЛА. Для отладки микропроцессорных систем требуется не только зафиксировать логические состояния, передаваемые по одной магистрали, но и идентифицировать информацию, то есть определить, к какому типу она относится (данные, команды или управление). Для этого используют многофазную синхронизацию. Этот режим работы анализатора может быть реализован следующим образом. Входные каналы анализатора разбиваются на две или три группы. По одной группе каналов записывается адрес, по другой — данные, по третьей — команды и коды управления. Каждая группа каналов записывается по своему тактовому сигналу и в свои разряды буферного регистра. После прихода всех тактовых им пульсов данные из буферного регистра подаются одновременно и в память, и на логический компаратор. Информация из памяти расшифровывается, коды команд переводятся в мнемонический код, соответствующий данному типу процессора, а данные и коды управления остаются без изменений.
Эта операция называется дисассемблирование, после чего производятся визуализация и сохранение информации. Второй тип ЛА характеризуется тесной причинно-следственной связью и хронологической зависимостью между событием и следствием. Поэтому часто требуется срабатывание ЛА именно по причине, а не по следствию. Для данного типа характерен небольшой объем памяти, но анализ временных соотношений требует более высокой частоты опроса. В таких устройствах чаще всего используется асинхронный режим, позволяющий отследить временные сдвиги сигналов. Способы запуска таких анализаторов не отличаются большим разнообразием и часто ограничиваются запуском по какомулибо событию. Частота исследуемых сигналов значительно возросла, поэтому существенное влияние на работу системы может оказать изменение формы сигналов. Это привело к тому, что помимо оценки временных характеристик часто бывает необходимо исследовать такие характеристики сигналов, как активные длительности фронта и среза, активная длительность импульса, всплески, дребезг сигналов и т.д. Для этого в состав модуля ЛА включается цифровой осциллограф, позволяющий видеть реальный сигнал и использо вать его параметры при задании способов запуска ЛА. Рассмотрим основные типы ЛА на примере анализаторов фирмы HP.
1. Настольный логический анализа тор (benchtop logic analyser). Предназначен для решения комплексных задач программно-аппаратной отладки микропроцессорных систем
. Сочетает в себе все необходимые возможности для решения конкретной задачи. Прибор может включать различные опции, например, аналоговый вход, большой объем памяти, осциллограф, генератор логических состояний.
2.Модульная система логического анализа (modular logic analysis system). Предоставляются наборы измерительных средств для различных задач тестирования цифровых систем, например, модули анализа временных соотношений и анализа состояний (state and timing analysis modules), модулиции цифрового осциллографа (digitizing oscilloscope modules), генератор логических состояний (pattern generator module), программные анализаторы реального времени (realtime software analysers). Модульная система представляет собой более мощное средство логического анализа, чем настольный логический анализатор. Она включает основной блок (mainframe) и набор модулей. При помощи добавления различных модулей можно как наращивать число каналов системы, так и расширять ее функциональные возможности.
3.Анализатор прототипов (prototype analyser). Используется для обработки и визуализации сигналов, собранных при помощи модульной системы логического анализа. Пользователю предоставляется удобный оконный интерфейс, позволяющий в различных окнах разместить такие представления сигналов, как временные диаграммы, листинг кода, гистограммы и т.д. С помощью маркеров обеспечивается привязка сигналов во времени для всех окон.
Способы запуска логических анализаторов.
Как уже было сказано, ЛА различаются по способам их запуска. Большинство ЛА предоставляют различные возможности для задания способов запуска. Пользователю предлагается определить события, которые будут последовательно оцениваться ЛА и при возникновении которых осуществляется запуск. События могут комбинироваться, зависеть друг от друга, оцениваться одновременно. Такие события называются условиями запуска. Основная функция запуска — оставить в памяти данные, которые полностью описывают событие, определяемое условиями запуска. Запуск срабатывает только после сбора необходимого количества информации, предшествующего запускающему событию. Эта информация называется предысторией (prehistory). Информация, собранная после прихода запускающего события, называется послеисторией (posthistory). Такая особенность запуска определяется цикличностью записи в память. Каждое новое слово записы вается в следующую ячейку памяти. Рис. 3. Настольные логические анализаторы Hewlett Packard Когда память заполняется, новая информация записывается поверх старой в циклическом порядке. При остановке сбора в памяти выделяется «окно» необходимых поль-
зователю данных, содержащее определенную пользователем предысторию и послеисторию. Механизм запуска также может использоваться для подсчета событий, для выборочной записи информации или для отображения в реальном времени. Способы запуска зависят от того, для какой задачи используется ЛА. Если в системе анализируются логические уровни и их временные соотношения, то и условия должны содержать набор состояний входов и выходов, временные соотношения между ними, времена существования набора состояний. Если производится отладка и тестирование микропроцессорных систем, то условие срабатывания должно содержать наборы команд, данных или их сочетания и временные соотношения между ними. Так, например, ЛА фирмы Tektronix используют для задания запуска автомат состояний срабатываний (trigger state machine). Этот автомат может содержать до шести состояний, где каждое состояние содержит от одного до четырех условных выражений типа «если то иначе» (ifthenelse). Каждое выражение оценивает комбинации из событий, число которых может быть до восьми, а выполнение его условий может определять до восьми действий. С приходом сигнала синхронизации в текущем состоянии оцениваются все выражения «если то иначе». Первое выражение в списке, условия которого выполняются, преобладает над остальными, и далее производятся действия, связанные с этим выражением. Если не выполняются условия ни одного выражения, автомат запуска остается в текущем состоянии и действия не производятся. ЛА фирмы HP предоставляют библиотеку макросов, определяющих параметры срабатывания. Каждый макрос имеет график измерения и структуру, похожую на предложение. Семейство макросов включает в себя основные макросы, последовательно определенные макросы, включая на хождение последовательности из n бит, макросы нахождения временных несоответствий, включая нахождение некоторого события X, произошедшего вскоре после события Y. Основу всех библиотек и состояний запуска составляют несколько основных условий. Первую группу условий можно определить как регистрирование событий. Канал или группа каналов определяются как тестовые, и каждое опрошенное значение этой группы проверяется на соответствие событию, определенному пользователем. Исключение каналов из тестовой группы возможно с помощью маскирования каналов. Самый простой способ запуска, применявшийся уже в первых анализаторах, — запуск по кодовому слову (по комбинации значений сигналов). Введение в логический анализатор схемы запуска такого типа позволяет производить запуск при появлении на входах логического анализатора определенного, заранее выбранного двоичного слова. Программы, как правило, содержат циклы подпрограмм и даже вложенные циклы, так что выбранное запускающее слово при последовательных проходах цикла может встречаться многократно. Чтобы анализатор мог различать эти циклы, в устройство запуска добавляется счетчик проходов, который задерживает момент фиксации данных в памяти, отсчитывая не синхросигналы, а число появлений запускающего слова, так что запуск производится по n - му проходу подпрограммы. Такой запуск называется запуском по последовательностям слов. Больше всего хлопот доставляют перемежающиеся неисправности, которые появляются не часто, случайным образом, и при обычных периодически повторяющихся экспериментах могут не обнаруживаться. Для борьбы с перемежающимися неисправностями дискретных систем в некоторых моделях анализаторов предусмотрен запуск по несовпадению. Используя определенный критерий запуска, анализатор фиксирует пришедшие данные и берет их за эталон, с которым сравнивает следующую последовательность данных, удовлетворяющую критерию запуска. Если данные различны, производится запуск ЛА. Возможно также задание эталонного набора данных пользователем. Может применяться комбинация описанных вариантов для задания более сложного запуска, например, такого, как подсчет времени, в течение которого данные не соответствовали за данному эталону. Вторая группа условий — это запуск по помехе. ЛА может включать в себя встроенный детектор помех, который непрерывно ожидает помехи на каждом канале. Детектор помех отслеживает поток собираемых данных. Когда возникает помеха, ЛА срабатывает и помеха выводится на экран. Детектор помех используется в основном для исследования помех на ли-
нии синхронизации. В высокоскоростных логических устройствах параметры синхронизации наряду с качеством сигнала – один из важнейших показателей. Третья группа условий — запуск по установке и удержанию (setupand hold). Запуск происходит по нарушению наиболее критичных параметров временных соотношений сигналов – времени установки сигнала и его удержания. Встроенный контролер установки и удержания определяет переключения во входных сигналах после того, как они собраны. Нарушения об наруживаются, если переключения сигналов находятся в пределах интервала, определенного пользователем. С помощью данного метода может быть определен разброс времени установки и удержания сигнала, помогающий определить критичные условия работы устройства. Четвертая группа условий — запуск с помощью цифрового осциллографа. Совместно с логическим анализатором часто применяется цифровой осциллограф, сигналы от которого могут использоваться для запуска анализатора. Используются различные виды за пуска. Запуск по перепаду – запуск по событию, когда фронт или спад пересекает заданный уровень; запуск переключения — по заданному уровню фронта и/или спада и временному интервалу. Срабатывание происходит, когда пересекается заданный уровень и время фронта или спада, в зависимости от требований пользователя, выше или ниже установленного. Запуск по помехе – отслеживание паразитных импульсов. Запуск по ширине импульса – контролируется продолжительность импульса. Запуск по прошествии времени используется при «зависании» системы, когда логические состояния не изменяются и анализатор срабатывает по прошествии некоторого времени после «зависания». Также цифровой осциллограф может использоваться при таких запусках, как запуск по установке и удержанию и запуск по кодовому слову.
После прекращения записи в ЗУ устройство управления визуальным выводом(транслирует информацию на экран дисплея.
Визуализация собранной информации.
Когда нужная информация собрана, возникает необходимость ее представления на экране. Причем визуализировать требуется не только собранную информацию, но и результаты ее обработки (например, диаграммы и коды). На ранней стадии развития средств представления информации достаточно было текстовых чернобелых мониторов с небольшим разрешением. Сейчас используются самые современные средства: мониторы с высоким разрешением и глубиной цвета, позволяющие реализовать отображение в графическом режиме, многооконный интерфейс, упрощающий настройку прибора и визуализацию информации, манипуляторы мышь, существенно упрощающие работу с прибором. ЛА фирмы Tektronix дает возможность самим обрабатывать данные с помощью интерфейса программирования TLA 700 (TPI), базирующегося на технологии Microsoft COM. Пользователь может с использованием привычного для него средства разработки написать приложение, конфигурирующее ЛА, собирающее и визуализирующее информацию. Наиболее распространенной формой представления данных являются временные диаграммы и таблицы состояний. При отображении применяются такие средства, упрощающие работу с данными, как маркер запуска, индицирующий момент запуска, масштабирование по осям, курсор или экранный указатель, перемещая который, можно отслеживать значение данных. Данные в таблице состояний могут воспроизводиться в различных кодах (двоичном, шестнадцатеричном, ASCII и т.д.). Для удобства восприятия применяется группировка строк и столбцов данных в блоки. Для удобства представления и возможности отладки программ в анализаторах состояния данные описываются на языке ассемблер, причем, как правило, адреса изображаются в шестнадцатеричном виде, команды декодируются в мнемонический код, а управляющие линии, метки и линии состояния записываются в двоичном коде. Профессиональные ЛА предоставляют возможность коррелировать по времени анализ состояний и анализ временных соотношений и показывать это на экране . При отображении и просмотре информации обычно имеется возможность осуществлять фильтрацию информации при выводе, поиск, сравнение, назначение закладок и меток, расчет временных интервалов между указанными точками и т.д. Существует такой способ отобра-
жения, как карта состояния. В этом режиме вместо таблицы единиц и нулей на экране воспроизводится матрица 2N точек. Каждая точка представляет одну возможную комбинацию значений N входных линий, так что любое исходное слово – точка. Слово, содержащее все нули, находится в верхнем левом углу экрана; слово, содержащее все единицы,
— в нижнем правом углу. Точки взаимосвязаны таким образом, что можно наблюдать последовательность обработки данных. Отрезок линии становится более ярким по мере приближения к новой точке, указывая тем самым направление по тока данных. Такой способ дает возможность весьма быстрого обнаружения искажений программы путем сравнения с «образцовой» картой со стояния. При отображении очень часто пользуются гистограммами, показывающими, например, повторяемость данных. При этом используются такие возможности, как выбор значения шкалы повторяемости (абсолютное, процентное), сортировка шкалы данных, использование цвета, шрифтов и т.д. Гистограммы могут показывать количественную характеристику повторяемости событий, таких как число вызовов функций, процедур или других событий, определяемых пользователем. Другой тип гистограмм показывает временную характеристику повторяемости события, отражая время выполнения определенных событий.
Логический анализатор на базе персонального компьютера.
Отечественный рынок средств диагностирования и отладки цифровых систем имеет свои особенности. Часто решающим фактором является цена изделия, в связи, с чем получили распространение ЛА, выполненные в виде периферийных устройств или плат расширения для персональных компьютеров. Зачастую по своим техническим параметрам, надежности, обеспечению документацией и сопровождению такие анализаторы не уступают западным аналогам. Например, фирма «Лаборатория автоматизированных систем и управления» («АС») предлагает целый ряд ЛА на базе персонального компьютера (ПК) с числом каналов от 16 до 64 и скоростью записи до 100 МГц. Устройства ввода логических сигналов выполнены в виде встраиваемых плат или внешних устройств, осуществляющих обмен с компьютером через параллельный порт. Это существенно уменьшает стоимость изделия, не ухудшая его характеристик. Настройка системы и визуализация собранной информации производятся программной оболочкой, причем высокая производительность ПК не обязательна, так как встраиваемые платы включают в себя все быстродействующие модули ЛА: память, счетчики предыстории и послеистории, модуль запуска, детектор помех. Модульное построение программного обеспечения, а также возможность добавления в ПК дополнительных плат ЛА делают систему гибкой и легко адаптируемой к конкретным задачам диагностики цифровых устройств. Это позволяет использовать ее как законченное устройство (ЛА) или как базовое средство для разработки систем цифровой диагностики «под ключ». Системы фирмы «АС» работают в асинхронном и синхронном режимах сбора информации. Запуск анализатора производится по кодовому слову с использованием маскирования каналов. При необходимости исследования формы сигналов ЛА фирмы «АС» может дооснащаться программным осциллографом, реализованным на базе встраиваемой платы с АЦП. В этом случае система синхронизирует свою работу с осциллографом, отображая не только уровни сигналов, но и их форму. Для подключения ЛА к тестируемому устройству используются выносные аналоговые компараторы, обеспечивающие большое входное сопротивление и малую входную емкость. Программная оболочка ЛА осуществляет управление сбором и визуализацию собранных данных в виде временных диаграмм и таблиц состояний, при этом включая в себя набор таких сервисных услуг, как экранный указатель, поиск заданных блоков данных, сравнение, масштабирование. Для полноценного диагностирования закрытого цифрового устройства бывает необходимо не только собирать цифровую информацию, но и подавать на вход устройства некоторое воздействие в виде последовательностей цифровых сигналов. Для данной цели используют генераторы слов. «Генераторы слов (генераторы данных, генераторы тестовых последовательностей) – приборы, предназначенные для формирования и подачи входных воздействий на проектируемую или диагностируемую дискретную систему».