

Строительные и дорожные машины. Основы автоматизации
.pdf21
dc 2 c1 c , dz a
где с – концентрация компонента в центре потока; с1 – концентрация этого же компонента вблизи реакционной поверхности стенки канала; а/2 – поло вина стороны прямоугольника, на котором происходит данное снижение кон центрации.
С учетом этого диффузионный поток к стенке можно записать в виде
Jd |
|
2d c c1 s |
, |
(1.13) |
|
||||
|
|
a |
|
|
другой поток – поток вещества, превращающегося на поверхности катализа тора в продукты за счет химической реакции в единицу времени составит
Jch kгетc1s, (1.14)
где кгет – константа скорости собственно гетерогенной химической реакции, которая определяется природой реагирующих веществ, составом катализато ра и зависит от температуры; А – площадь поверхности, на которой происхо дит химическая реакция.
Приравнивая правой части уравнений (1.13) и (1.14), получаем
|
2d c c1 À |
=k |
гет |
c s = к |
эф |
с s, |
||||||
|
|
|
|
|||||||||
|
|
a |
|
|
|
1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||
или после преобразований |
|
|
|
|
|
а |
|
|
|
|||
|
|
1 |
|
1 |
0,5 |
. |
|
(1.15) |
||||
|
|
|
|
|
|
|||||||
|
|
кэф |
кгет |
|
|
d |
|
|
||||
Таким образом, эффективная константа скорости кэф в уравнении (1.15)
определяется, в соответствии с (1.11), скоростью гетерогенной химической реакции, коэффициентом диффузии компонентов, а также расстоянием, кото рое должны преодолеть молекулы токсичных газов до каталитической по верхности. Увеличивая размер каждого канала, будет замедляться диффузия
иуменьшаться эффективная константа скорости конверсии. Для подобных процессов известно, что диффузия компонентов в острые углы реактора и к удаленным от центра потока поверхностям (каналы с узким вытянутым сече нием) будет проходить заметно дольше, и эффективность этих поверхностей для нейтрализации оказывается низкой.
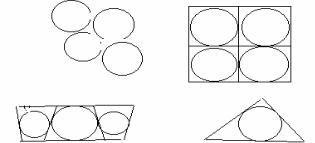
На рис.1.6 приведены некоторые примеры сечений каналов. Из их сравне ния видно, что в круглых каналах поверхность равнодоступна. Однако про межутки между окружностями так же имеют труднодоступные острые углы. Поэтому доступность всей поверхности канала для диффузии можно достиг нуть оптимизацией параметров конвертора. Имея целевую функцию в виде заданной эффективности нейтрализации и используя вышеперечисленные за висимости, можно легко получить выражения, связывающие длину, диаметр
ипараметры канала конвертора. Константа скорости гетерогенной реакции,
22
так же как и коэффициент диффузии, увеличиваются с повышением темпера туры (по уравнению Аррениуса). Однако наиболее сильная зависимость кон станты скорости гетерогенной реакции остается от структуры и химического состава используемого катализатора. Технологический процесс заключается в нанесении на готовый субстрат (носитель) каталитического покрытия с высо кой точностью. Смесь высокодисперсных окислов металлов (Al, Ce, Zr и др.) с удельной площадью до 160 м2 на грамм, пропитывают химическими реа гентами и растворами солей драгоценных металлов (Pt, Rh, Pd), при этом об разуются нерастворимые соединения драгоценных металлов, которые осаж даются на поверхности оксидов.
Рис.1.6. Схемы сборки катализаторов
Указанную смесь смешивают с водой, и полученный раствор (суспензию) наносят на внутреннюю поверхность керамического субстрата с последую щей сушкой и высокотемпературным обжигом. Данные операции произво дятся на специализированной автоматической линии. При обжиге происходит полное восстановление драгоценных металлов, которые закрепляются на по верхности высокодисперсных оксидов в виде образований, размером не более нескольких десятков атомов.
Финская компания «Кемира» разработала новый тип катализатора, его намечено осуществлять в двух основных модификациях: трехкомпонентные и катализаторы окисления. Новая система состоит из металлической подложки, тонкого грунтовочного покрытия, каталитически активного вещества и обо лочки. Оболочка изготавливается из хромистой стали. В качестве подложки используют металлическую основу (ферритовой хромоалюминиевой стали с добавлением редкоземельных элементов) вместо керамики. Высокая проч ность металла и хорошая обрабатываемость дают возможность изготовить стенки преобразователя достаточно тонкими, что в результате обеспечивает общее увеличение геометрической площади металлической подложки. Благо даря малой толщине (0,04 мм без покрытия), конструкция подложки может быть изготовлена таким образом, что эффективное поперечное сечение зна чительно выше, чем при использовании керамического материала. Эффек тивное поперечное сечение без покрытия составляет 91%.
23
Каталитические нейтрализаторы создают дополнительный шум при нали чии узких каналов, по которым распространяется газ, изза чего образуется множество небольших источников шума. При проектировании выпускной системы каталитический нейтрализатор должен быть проработан так, чтобы избежать высоких уровней сопротивления проходу отработавшего газа, кото рые в значительной мере влияют на вибрационные характеристик всей систе мы, а также на мощностные показатели двигателя.
1.2.Совершенствование структуры парка и классификация
машин
Под структурой парка машин понимается количественное соотношение между машинами одного и того же функционального назначения, но разными по своим производственным возможностям (например, количественное соотно шение между погрузчиками малой, средней и большой грузоподъемности) и между машинами разного функционального назначения (например, количествен ное соотношение между одноковшовыми погрузчиками и экскаваторами, между экскаваторами и скреперами и т. д.). От того, насколько данная структура парка удовлетворяет потребностям строительного объекта, во многом зависят эффек тивность использования техники и стоимость выполняемых ею работ. Поэтому с точки зрения эксплуатации важно обеспечить не только высокое качество и необ ходимые параметры и характеристики какогото определенного типа машин, но и необходимые (оптимальные) пропорции между различными видами техники для даннойотраслинародного хозяйства.
Так, например, для разработки мерзлых грунтов можно использовать ди зельмолоты или буровые машины, либо мощные рыхлители, работающие вме сте с траншеекопателями. Однако производительность машин и стоимость выпол няемых работ в обоих случаях будут не одинаковы: производительность дизель молотов или буровых машин ниже, а стоимость производимых ими работ в 5…6 раз выше. Следовательно, отсутствие мощных рыхлителей и соответствующего количества траншеекопателей не позволяет применить передовые технологиче ские приемы для разработки мерзлых грунтов и неизбежно приводит к сниже нию основных экономических показателей.
Вместо одноковшовых строительных экскаваторов, которые обычно работают вместе с бульдозерами, разравнивающими грунт, и с самосвалами, отвозящими грунт, наиболее эффективным является применение одноковшовых погрузчиков, которые могут работать без бульдозеров и самосвалов, перемещая грунт в ковше к месту разгрузки. К тому же погрузчики с ковшами такой же вместимостью, что и ковши экскаваторов, имеют в 1,3...2 раза меньшую массу (и, следователь но, меньшую материалоемкость),чем экскаваторы. Поэтому, если промышленно
24
стью выпускается слишком большое число одноковшовых экскаваторов и малое число погрузчиков, то это невыгодно для народного хозяйства, так как при этом снижается производительность машин и повышаетсястоимостьработ.
То же самое характерно и для скреперов, применение которых при опреде ленных условиях может оказаться значительно выгоднее, чем одноковшовых экскаваторов, так как скрепер без помощи бульдозеров и транспортных средств может разрабатывать и разравнивать грунт и транспортировать его в ковше на некоторое расстояние. При большом объеме земляных работ экономически це лесообразно использовать мощные скреперы с ковшом большой, а не малой и средней вместимости, что позволяет уменьшить число скреперов и количество операторов, управляющих ими; последнее весьма важно с точки зрения эконо мии трудовых ресурсов. Невыгодным может оказаться и слишком большое чис ло гусеничных бульдозеров или гусеничных экскаваторов и погрузчиков по сравнению с теми же машинами на пневмоколесном ходу, так как последние имеют меньшую материалоемкость, лучшую маневренность, они более быст роходны, чем гусеничные машины, и могут собственным ходом перемещаться по хорошим дорогам.
Таким образом, наряду с повышением качества и технического уровня строительных и дорожных машин, одновременно должна решаться и другая задача — совершенствование структуры парка и классификация строитель ных и дорожных машин. Решение этих задач является неотъемлемой частью решения общей проблемы интенсификации использования техники на строи тельной площадке и повышения на этой основе производительности труда и экономии трудовых и материальных ресурсов.
Классификация машин. Основой для наиболее общей классификации ма шин и оборудования могут служить основные виды работ. Исходя из этого, машины можно разделить на следующие основные классы: транспортные, транспортирующие и погрузоразгрузочные; грузоподъемные; машины и оборудование для земляных работ; оборудование для свайных работ; для дробления, сортировки и мойки каменных материалов; машины и оборудова ние для приготовления, транспортирования бетонов и растворов и уплотне ния бетонной смеси; для отделочных работ; ручной механизированный инст румент, предназначенный для выполнения различных видов работ в строи тельстве. Классы машин делятся на отдельные группы, типы, типоразмеры в соответствии с технологическим назначением, характером рабочего процесса, общим конструктивным решением и техническими параметрами. Например, машины для земляных работ делятся на группы по характеру рабочего про цесса: землеройные (экскаваторы), отрывающие и перемещающие грунт на небольшие расстояния, определяемые конструктивными элементами маши ны; землеройнотранспортные (бульдозеры, скреперы, грейдеры, грейдер элеваторы), разрабатывающие грунт во время движения и перемещающие его на определенное расстояние; для гидравлической разработки грунта (земле
25
сосы, гидромониторы); рыхлители твердых и мерзлых грунтов; грунтоуплот няющие; буровые; для подготовки площадки (вспомогательные) – корчевате ли, кусторезы, камнеуборочные и др. Многие группы машин делятся на типы, например экскаваторы – одноковшовые канатные и гидравлические. В свою очередь большинство типов машин по главным параметрам подразделяется на типоразмеры.
Главным параметром может служить, например, вместимость ковша (экс каваторы), максимальная грузоподъемность (краны) или масса машины, мощность силовой установки и т. п. Например, одноковшовые экскаваторы имеют шесть типоразмеров с ковшами вместимостью q = 0,25; 0,4; 0,63; 1,0; 1,6; 2,5 м3. Кроме деления машин по указанным признакам и параметрам в за висимости от режима рабочего процесса строительные машины подразделя ются на два больших класса: циклического действия и непрерывного дейст вия. Например, в экскаваторе одноковшовом циклического действия непо средственно процесс копания грунта занимает 25...30 % от времени рабочего цикла, в остальное время производятся операции поворота платформы и вы грузки грунта. В то же время экскаватор непрерывного действия непрерывно разрабатывает грунт и одновременно транспортирует его. Достоинствами машин циклического действия являются их универсальность и приспособ ленность к работе в различных условиях. Достоинства машин непрерывного действия – их большая производительность и лучшие техникоэкономические показатели при специальных условиях работ. Около 80 % машин в строитель стве имеют собственное ходовое оборудование. По типу ходового оборудова ния они подразделяются на гусеничные, пневмоколесные, рельсовые, колес ные и шагающие.
Строительные и дорожные машины делят также на универсальные, спо собные быстро менять рабочее оборудование и выполнять различного рода работы, и специальные, предназначенные для выполнения одного специаль ного вида работ. Последние в определенных условиях работы обеспечивают более высокие техникоэкономические показатели. По роду используемой энергии силовой установкой строительные машины делятся на электрические и работающие от двигателей внутреннего сгорания (ДВС). Первые обладают большей готовностью к работе по сравнению со вторыми. Важным преиму ществом вторых перед первыми является их автономность от источника энер гии. Существует еще классификация на отдельные типы машин по различным конструктивным особенностям. Все мобильные строительные машины можно представить как системы, состоящие из следующих основных частей: силово го оборудования, трансмиссии, рабочего оборудования, ходового оборудова ния и системы управления. В свою очередь, эти части обычно состоят из от дельных агрегатов и сборочных единиц, а последние — из деталей. Кроме структурных схем для машин принято различать также их конструктивные и
26
кинематические схемы, а для машин с гидро и электроприводами также схе мы их гидро и электроприводов.
Конструктивные схемы определяют принципиальное устройство – конструкцию машин.
Кинематические схемы показывают взаимосвязи элементов механическо го привода.
Схемы гидро- и электроприводов показывают взаимосвязи гидравличе ских и электрических систем в приводе.
Для составления кинематических и гидравлических схем используют ус ловные обозначения. Основные части строительных и дорожных машин (за исключением рабочего оборудования), а также их агрегаты, сборочные еди ницы и детали имеют много общего. Поэтому в данной главе рассмотрены общие сведения, касающиеся общих частей машин и основных технико экономических показателей машин.
1.5. Общая характеристика приводов и силового оборудования машин
Привод – это совокупность силового оборудования, трансмиссии и сис тем управления, обеспечивающих приведение в действие механизмов маши ны и рабочих органов. По системе приводов строительные машины подразде ляются на машины с групповым и многомоторным приводом. Во первых, привод всех механизмов исполнительных рабочих органов осуществляется с помощью муфт, тормозов и механических передач. Вовторых, каждый ис полнительный механизм приводится в движение от индивидуального элек тро, гидро или пневмодвигателя. Возможность обеспечения более высокого КПД, простоты и агрегатности конструкции, автоматизации, лучших условий эксплуатации и ремонта предопределяет преимущественное применение на строительных машинах индивидуального привода механизмов. Общими тре бованиями, предъявляемыми к приводу большинства строительных и дорож ных машин, являются: автономность силового оборудования от внешнего ис точника энергии, обеспечение минимальных габаритов, массы, большая на дежность и готовность к работе, высокий КПД, простота реверсирования ме ханизмов и регулирования скоростей и рабочих усилий, обеспечение плавно сти включения механизма, независимость рабочих движений при возможно сти их совмещения, простота автоматизации системы управления, реализация блочных и агрегатных конструкций элементов привода. Дополнительные требования определяются режимом работы машины, который в основном ха рактеризуется отношением максимальных крутящих моментов (нагрузок) к средним Тmax /Tcp, отношением максимальных частот вращения (скоростей)
к средним max / cp , продолжительностью времени включения привода

27
(ПВ) в процентах от общего времени работы машины и количеством включе ний в час (КВ). В зависимости от степени изменения этих параметров, кото рые колеблются для многих машин в пределах Тmax /Tcp =1,1...3,0,
ПВ=15...100 %, КВ=10...600, режимы нагружения многих машин и их отдель ных механизмов привода условно подразделяют на легкий, средний, тяжелый и весьма тяжелый. Исходя из этих условий для многих машин также требует ся, чтобы у приводов была высокая перегрузочная способность, способность ограничивать максимальные нагрузки, мягкая механическая характеристика, определяемая существенным изменением крутящего момента привода при изменении его угловой скорости. Вид привода должен соответствовать усло виям работы машины [9]. Мощность привода, необходимая для выполнения рабочих операций,
Ðï Fc èëè Pï Tñ , (1.16)
где Fc,Tñ – усилие и момент сопротивления, преодолеваемые исполнитель ными механизмами; υ, линейная и угловая скорости этих механизмов.
Силовое оборудование. В качестве силового оборудования на строитель ных и дорожных машинах используются обычно тепловые двигатели внут реннего сгорания (ДВС), как правило, дизельные, и реже − бензиновые [11, 12].
Рис.1.7. Продольный и поперечный разрез двигателя
Мощность дизелей (рис. 1.7), применяемых на тяжелых землеройно транспортных машинах, достигает 1000...1200 кВт. Дизельные двигатели об ладают относительно высоким КПД (30...37%), сравнительно невысокими удельной массой (3...4 кг/кВт) и расходом горючего (0,180...0,220 кг/(кВт∙ч). Поперечный разрез двигателя показан на рис.1.7. К недостаткам дизельных двигателей в приводе машин следует отнести затруднения запуска двигателя

28
при эксплуатации при низких температурах и большую чувствительность к перегрузкам, связанную с его жесткой механической характеристикой. На грузочная и скоростная характеристики приведены на рис.1.8.
Механическая характеристика дизельного двигателя, определяемая изме нением крутящего момента на валу и соответствующим усилием на рабочем органе в функции частоты его вращения и соответствующей скорости рабоче го органа, характеризуется кривой 1 на рис. 1.9.
а) б)
Рис.1.8. Регуляторная (а) и скоростная характеристики (б)дизеля
Рис. 1.9. Механические характеристики силового оборудования: 1−дизеля; 2−электродвигателя переменного тока с фазным ротором;2´− электродвигателя переменного тока с короткозамкнутым ротором;3− электродвигателя постоянного тока с последовательным возбуждением; 4−электродвигателя постоянного тока с параллельным возбуждением; 5−трехобмоточный генератордвигатель постоянного тока (ТГ—Д); 6 − ге нератордвигатель с электромашинным усилителем (Г—Д с ЭМУ); 7−нерегулируемого
гидронасоса; 8− регулируемого гидронасоса
Кривая 1 показывает, что в основной рабочей зоне характеристики крутя щий момент нарастает от 0 до величины Тн при очень незначительном изме нении частоты вращения. При дальнейшем изменении частоты вращения вала до момента начала опрокидывания (заглохания) двигателя крутящий момент возрастает незначительно – на 8...13%. В машинах, не требующих автономно сти от внешнего источника энергии, в качестве силового оборудования ис
29
пользуют электродвигатели переменного или постоянного тока. Электродви гатели переменного тока, питающиеся обычно от электросети напряжением 380...220 В с нормальной частотой 50 Гц, конструктивно просты, дешевы, на дежны и удобны в эксплуатации, поэтому наиболее широко применяются в качестве силового оборудования на строительных машинах. Электродвигате ли с короткозамкнутым ротором наиболее просты, надежны и удобны в управлении. Однако в процессе их работы они имеют большой пусковой ток. Эти двигатели, механическая характеристика которых на рис. 1.8 представ лена кривой 2', не имеют также достаточных возможностей регулирования скоростей в зависимости от нагрузки. Поэтому наиболее часто их применение ограничивается небольшими мощностями—до 8...10 кВт. Асинхронные элек тродвигатели переменного тока с фазным ротором, механическая характери стика которых представлена на рис. 1.4 кривой 2, позволяют с помощью включения дополнительных сопротивлений в цепь ротора получить, кроме того, характеристики с различными степенями жесткости и способностью ре гулирования скорости от нагрузки. Эти характеристики обеспечивают удов летворительные условия пуска и торможения механизмов. Асинхронные электродвигатели обладают высокой перегрузочной способностью, опреде ляемой отношением максимального момента к номинальному, т. е.
Tmax /Tíîì .
Для электродвигателей общего назначения 1,8...2,2, а для элек тродвигателей специального кранового исполнения 2,5...3,4. Недос таток асинхронных электродвигателей – их высокая чувствительность к коле баниям напряжения в питающей сети, что имеет место на стройплощадке. В грузоподъемных машинах, требующих точной остановки и плавной посадки грузов, применяют также двухскоростные асинхронные короткозамкнутые двигатели с соотношением скоростей 2; 8/3; 3; 10/3.
В приводе ручных машин для снижения массы электродвигателей осуще ствляют их питание напряжением повышенной частоты. Так, переход с по мощью специальных преобразователей на питание электродвигателей с час тотой 50 на 400 Гц уменьшает массу электродвигателей в 3,5 раза. Примене ние высокочастотных двигателей, имеющих жесткую характеристику, удобно для ручных машин с высокими скоростями рабочих органов, в которых изме нение нагрузки одновременно не должно существенно влиять на частоту вращения вала.
В приводе ручных машин часто применяют однофазные коллекторные двигатели, обладающие высокой удельной мощностью на единицу массы и мягкой механической характеристикой, обеспечивающей изменение скорости рабочего органа при росте на нем нагрузки. Двигатель малочувствителен к колебаниям напряжения в питающей сети, устойчиво работает в режиме час тых пусков, может включаться в сеть постоянного тока и переменного без
30
преобразователей. К недостаткам таких двигателей следует отнести их боль шую стоимость изза наличия коллектора и щеток, а также необходимость высококвалифицированного обслуживания.
Среди различных типов электродвигателей особо можно выделить одно фазный электромагнитный вибродвигатель. Отличаясь простотой конструк ции и высокой надежностью в работе, электродвигатель производит непо средственное преобразование электромагнитной энергии в механическую с возвратнопоступательным движением. Это определяет основную область их применения в молотках и перфораторах, а также в качестве универсальных вибровозбудителей в вибропитателях, дозаторах, виброгрохотах, вибрацион ных насосах.
Электродвигатели постоянного тока обеспечивают лучшую плавность пуска и торможения механизмов по сравнению с двигателями переменного тока. Как видно из рис. 1.9, двигатели с последовательным возбуждением об ладают мягкой (кривая 3), с параллельным возбуждением — жесткой (кривая 4) механическими характеристиками. Однако эти двигатели имеют большую удельную массу (кг/кВт) по сравнению с асинхронными двигателями и могут работать в условиях строительства в основном от специального генератора постоянного тока или тиристорных преобразователей. Поэтому их примене ние на строительных машинах ограничено. Наиболее широко используют двигатели постоянного тока в экскаваторах средней и большой мощности с ковшами вместимостью от 4 м3 и более. В этом случае двигатели чаще всего работают в системах: трехобмоточный генератор –двигатель (ТГ – Д), генера тор – двигатель с электромашинным усилителем (Г – Д с ЭМУ) или с магнит ным усилителем (Г–Д с МУ). Механические характеристики этих силовых установок (кривые 5 и 6 на рис. 1.9) относятся к числу мягких характеристик, у которых скорость приводимых рабочих органов существенно изменяется по мере изменения рабочей нагрузки. В переходных режимах пуска и торможе ния эти установки обеспечивают необходимую плавность. Поэтому, несмотря на большую удельную массу этих силовых установок, которая в 1,5...2,5 раза больше других, их наиболее целесообразно применять на экскаваторах сред ней и большой мощности. Кроме двигателей внутреннего сгорания и элек тродвигателей к силовому оборудованию строительных машин относятся также комбинированные силовые установки: ДВС − электрогенератор, обес печивает электропривод механизмов от автономного источника энергии; ДВС (или электродвигатель) − гидронасос обеспечивает гидропривод механизма; ДВС (или электродвигатель) − компрессор (компрессорная установка) обес печивает пневмопривод механизмов. Новыми элементами в этих установках являются гидронасосы и компрессоры.
Гидронасосы, применяемые в приводе строительных машин, по способу подачи жидкости подразделяются на шестеренчатые аксиальнопоршневые и лопастные (рис. 1.10). Шестеренчатые насосы (рис. 1.10, а) состоят из корпу