

Строительные и дорожные машины. Основы автоматизации
.pdf160
двигателями переменного тока возможно только в ограниченных пределах, определяемых жесткой внешней механической характеристикой крановых асинхронных двигателей. Вместе с тем развивающиеся тенденции в укрупнении монтажных элементов и ограничении допусков на их монтаж требуют от грузоподъемных машин плавной посадки строительных конструкций на место установки. С этой целью в электрореверсивных лебедках, используемых в кранах в качестве механизмов подъема грузов, применяют тормозные генераторы (вихревые тормоза), двигатели с частотным регулированием скорости на переменном токе или двигатели постоянного тока, позволяющие получить значительно большие пределы регулирования скоростей, повышать скорости подъема и опускания малых грузов и пустого крюка, осуществлять плавное регулирование скорости при подъеме и торможении груза. Электрореверсивная лебедка с тормозным генератором и характеристика тормозного генератора показаны на рис. 3.19.
Рис. 3.19. Кинематическая схема электрореверсивной лебедки с тормозным генератором (а) и характеристика тормозного генератора (б)
Тормозной генератор монтируется на противоположной от двигателя 3 стороне редуктора. Статор генератора 1 жестко закреплен на корпусе редуктора, а ротор 2 − с ротором электродвигателя и вращается вместе с ним. При вращении ротора генератора в постоянном магнитном поле неподвижного статора в нем создается в результате взаимодействия полей тормозной момент, пропорциональный скорости вращения ротора и регулируемому току возбуждения обмоток статора. При наложении характеристики генератора на внешнюю механическую характеристику двигателя получают совместные характеристики с плавно изменяющимися малыми скоростями опускания груза. В некоторых конструкциях башенных кранов для механизма подъема груза используют две электрореверсивные лебедки, совместная работа которых значительно расширяет диапазон рабочих скоростей (см. рис. 3.17, б). По такой схеме возможна совместная работа барабанов 5 и 6 в одном или разных направлениях, работа только одного барабана при заторможенном втором.
В монтажных кранах большой грузоподъемности применяют многоскоростные лебедки с несколькими двигателями и барабанами. На рис. 3.20 показана схема такой грузовой лебедки крана с грузовым моментом 10 000 кН ∙ м.

161
Рис. 3.20. Схема многоскоростной лебедки с несимметричным дифференциалом: 1, 12 – барабаны; 2,11– двигатель; 3,10– зубчатая муфта; 4, 9 – колодочные тормоза; 5– редуктор с несимметричным дифференциалом; 6– дифференциал; 7,8 – валы
несимметричного дифференциала; 1– ось
Кинематическая схема основана на применении редуктора 5 с несимметричным дифференциалом 6. Электродвигатели 2 и 11 посредством зубчатых муфт 3 и 10 соединены с валами 7 и 8 несимметричного дифференциала. На валах двигателя установлены колодочные тормоза 4 и 9. На выходных валах редуктора смонтированы барабаны 1 и 12, свободно вращающиеся на оси 13. В лебедке, изготовленной по этой схеме, возможно получить четыре скорости в каждом направлении: первая — при вращении обоих двигателей в одном направлении; вторая — при вращении только двигателя 2; третья — при вращении только двигателя 11; четвертая — при вращении двигателей 2 и 11 в противоположных направлениях.
Опорная часть передвижных башенных кранов (рис. 3.21,а) включает нижнюю ходовую раму 3, шарнирные кронштейны 2 и четыре ходовые тележки.
Рис.3.21. Опорная часть передвижения башенного крана: а) – общий вид; б)- схема балансирных тележек; в)– схема механизма передвижения; 1– тележки;2– кронштейн; 3– нижняя ходовая рама;4– опорно-поворотное устройство; 5– тяга; 6– зубчатая передача; 7–
колеса; 8– редуктор; 9– муфта с тормозом; 10– двигатель

162
В рабочем положении ходовые тележки удерживаются тягами 5 в соответствии с шириной рельсового пути. В транспортном положении тележки устанавливают вдоль продольной оси, уменьшая ширину неповоротной части крана. Шарнирное крепление тележки с ходовой рамой обеспечивает крану возможность перемещения по криволинейному пути и не требует демонтажа тележек при переводе крана в транспортное положение. Для лучшего вписывания в кривые участки пути приводные ходовые тележки располагают по одной стороне крана. Ходовые тележки (приводные и неприводные) могут иметь два, три и большее число ходовых колес (рис. 3.21, 6). Для равномерного распределения нагрузок между колесами они объединяются в балансирные тележки.
Механизм передвижения приводных ходовых тележек (рис. 3.21, б) состоит из электродвигателя 10, муфты с тормозом 9, редуктора 8 и открытой зубчатой передачи 6, приводящей во вращение ходовые колеса 7. На нижней ходовой раме укреплено опорно-поворотное устройство 4, которое воспринимает вертикальные и горизонтальные усилия от поворотной части крана. Механизм вращения (рис.3.22, а, б) состоит из двигателя 2, цилиндрического или планетарного редуктора 1 и тормоза 3. Выходная шестерня механизма 4, установленного на поворотной платформе, находится в постоянном зацеплении с неподвижным зубчатым венцом и заставляет поворачиваться платформу вокруг оси 1–1.
Рис. 3.22. Кинематические схемы механизмов вращения:
а) − с цилиндрическим планетарным редуктором; б) − с червячным редуктором; в) − с канатным приводом от электрореверсивной лебедки; 1 – редуктор; 2− муфта; 3− тормоз
Механизмы вращения тяжелых монтажных башенных кранов выполняются с цевочным зацеплением поворотного венца с выходным колесом редуктора или с канатным приводом, принципиальные схемы которых представлены на рис. 3.23, в. Они снабжаются муфтами предельного момента, срабатывающими при действии на кран чрезмерных инерционных и ветровых нагрузок.
3.4. Стреловые самоходные краны
Стреловые самоходные краны широко используются при производстве строительно-монтажных и погрузочно-разгрузочных работ. Основным достоинством стреловых самоходных кранов является автономность их
163
привода, способность быстрого перебазирования с одного объекта на другой, большое разнообразие сменного оборудования.
Стреловые самоходные краны классифицируют по типу ходового оборудования и привода, по исполнению и виду стрелового оборудования. По типу ходового оборудования их разделяют на краны автомобильные, пневмоколесные, на специальном шасси автомобильного типа, гусеничные, на короткобазовом шасси, на тракторах и прицепные. По типу привода краны бывают с одно- и многомоторным (индивидуальным) приводом. Чаще применяют многомоторный привод — электрический, дизель-электрический, гидравлический или комбинированный (с различными типами привода отдельных механизмов). По исполнению и виду стрелового оборудования стреловые самоходные краны выпускаются с невыдвижными (постоянной длины), выдвижными и телескопическими стрелами. Длина выдвижных стрел изменяется без нагрузки, телескопических − с нагрузкой на крюке. Телескопические стрелы в сочетании с гидроприводом преимущественно применяют в конструкциях автомобильных кранов и кранов на специальном шасси автомобильного типа, так как благодаря взаимному перемещению секций относительно друг друга обеспечивается наводка монтажного элемента на место установки, в том числе и в труднодоступных местах. Длину стрел изменяют вставкой дополнительных секций или установкой управляемых гуськов. На стреловых кранах широко используется башенностреловое оборудование.
Паспортная грузоподъемность всех стреловых кранов (кроме гусеничных) может быть реализована только при работе на выносных опорах, когда ходовое оборудование полностью освобождается от нагрузки. При работе без выносных опоргрузоподъемность снижается в несколько раз. Движение самоходных кранов с грузом допускается со значительными ограничениями по грузоподъемности и скорости, указываемой в технической характеристике крана, и только при стреле, расположенной вдоль оси ходовой части крана.
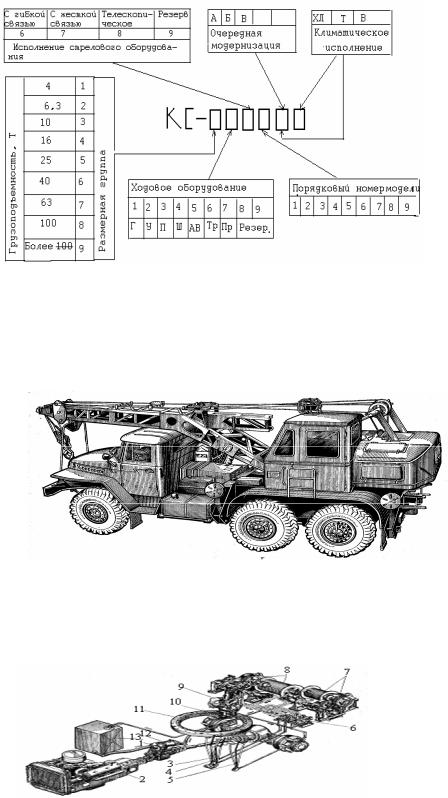
Кранам, выпускаемым заводами Минстройдормаша, присваивается индекс, состоящий из двух букв — КС (кран стреловой) и четырех цифр, рис. 3.23. Цифры означают: первая — размерную группу, вторая — тип ходового оборудования, третья — исполнение стрелового оборудования, четвертая — порядковый номер модели. После цифр в индексе могут указываться очередная модернизация (А, Б, В) и климатическое исполнение (ХЛ, Т, ТВ). Так, индекс КС-8362ХЛ означает: кран стреловой грузоподъемностью 100 т, пневмоколесный с гибкой подвеской, второй модели в северном исполнении. Действует и другая индексация, например, МКГ-25БР — монтажный кран гусеничный, грузоподъемностью 25 т с башенностреловым оборудованием и раздвижными гусеницами, СКГ-63А − стреловой кран гусеничный, грузоподъемностью 63 т, модернизация А.
164
Рис. 3.23. Система индексации стреловых самоходных кранов
Автомобильные краны. Автомобильные краны (рис.3.24) выпускаются грузоподъемностью 4; 6,3; 10 и 16 т. Их монтируют на двухили трехосном шасси серийно выпускаемых грузовых автомобилей. Привод всех механизмов автомобильных кранов осуществляется от двигателя автомобиля.
Рис.3.24. Общий вид автомобильного крана в транспортном положении
По типу привода различают автомобильные краны с механическим (преимущественно малых типоразмеров), гидравлическим и электрическим приводом. Механическая часть гидравлического привода показана на рис.3.25.
Рис.3.25. Схема привода крана АК – 3562А:
1– привод гидронасоса; 2– коробки передач; 3– рукоятка подъема и опускание груза; 4– рукоятка подъема и опускание стрелы; 5– рукоятка поворота платформы; 6– распределитель; 7– стреловая лебедка; 8– грузовая лебедка; 9– механизм вращения платформы; 10– выходная шестерня; 11– опорно-поворотное устройство; 12–
гидродвигатель; 13– бак масляный
165
Кроме основной стрелы краны оснащаются удлиненными стрелами, стрелами с гуськами, башенно-стреловым оборудованием, а гидравлические краны — телескопическими выдвижными стрелами.
В зависимости от массы поднимаемого груза и вылета стрелы, краны могут работать на выносных опорах или без них, перемещаться с грузом в пределах строительной площадки, масса которого меньше номинального на соответствующем вылете, со скоростью до 5 км/ч при положении груза вдоль оси крана («стрела назад») и поднятом на высоту не более 0,5 м.
При механическом приводе движение от двигателя рабочим механизмам передается через систему промежуточных передач. При этом скорость рабочих движений регулируют частотой вращения двигателя и коробками перемены передач, а направление вращения – коническими и цилиндрическими реверсами. Для управления механизмами (муфтами, тормозами) применяют пневматическую систему управления, действующую от компрессора, приводимого в работу от двигателя автомобиля.
Для снижения нагрузок на шасси автомобиля и обеспечения его устойчивости шасси I усиливают дополнительной рамой 4, которую оборудуют выносными опорами 3 и 8, стабилизирующим устройством 6, блокирующим подвеску автомобиля при работе крана. Поворотная платформа 9 вращается на роликовом опорно-поворотном устройстве 7, закрепленном на дополнительной раме. На поворотной платформе кроме стрелы размещены противовес 10, двуногая стойка 11, реверсивно-распределительный механизм 13, механизм вращения 14, грузовая 15 и стреловая 12 лебедки, кабина крановщика и электрооборудование.
Крутящий момент двигателя через коробку перемены передач, коробку отбора мощности 2 и промежуточный редуктор 5 передается реверсивнораспределительному механизму 13 и далее при переключении муфт в распределительной коробке – механизму вращения 14, грузовой 15 и стрелоподъемной 12 лебедкам. Кинематическая схема позволяет совмещать операции подъема груза с поворотом поворотной платформы. Гидравлический и электрический приводы существенно упрощают кинематическую схему крана, расширяют технологические возможности крана и обеспечивают более глубокое регулирование скоростей рабочих движений.
На рис. 3.26 показан общий вид крана на шасси автомобиля ЗИЛ. Основным видом рабочего оборудования является стрела, состоящая из подвижных и неподнижной секций. Передвижение подвижной секции производится гидроцилиндром 2 двустороннего действия. Для увеличения подстрелового пространства на подвижной секции устанавливают гуськи разной длины и под различными углами к ее продольной оси. Изменение угла наклона стрелы производится параллельно действующими гидроцилиндрами 3 с фиксацией их штоков в заданном положении гидрозамками. Подъем и опускание груза осуществляются грузовой лебедкой, состоящей из гидромотора 10, редуктора 8, барабана 9 и нормально замкнутого тормоза.

166
Рис.3.26. Общий вид автомобильного крана и кинематическая схема привода: 1,4− рамы; 2− коробка отбора мощности; 3, 8− выносные опоры; 5− промежуточный редуктор; 6− стабилизатор; 7− опорно-поворотное устройство; 9− поворотная платформа; 10− противовес; 11− двуногая стойка; 12,15− лебедки; 13− реверсивно-распределительный
механизм; 14− механизм вращения
Механизм вращения 7 состоит из гидромотора 6, редуктора 4, на выходном валу которого установлена шестерня, входящая в зацепление с неподвижным венцом опорно-поворотного круга. Фиксирование механизма поворота осуществляется тормозом 5.
Гидравлический насос 11 приводится в движение от двигателя автомобиля 14 через коробку передач 13 и редуктор отбора мощности 12. Система привода и управления им допускает совмещение операций: подъем и опускание груза — с подъемом и пусканием стрелы, с поворотом платформы, с выдвижением и втягиванием секции телескопической стрелы; подъем и опускание стрелы — с выдвижением и втягиванием ее секции, с поворотом платформы; поворот платформы — с выдвижением и втягиванием секции стрелы.
При дизель-электрическом приводе каждый механизм имеет индивидуальный электродвигатель, получающий энергию от генератора трехфазного тока, вращаемого двигателем автомобиля.
Автомобильные краны оснащаются устройствами, обеспечивающими их безопасную эксплуатацию: ограничителями грузоподъемности, высоты подъема крюка, угла наклона стрелы, указателями крена и грузоподъемности.
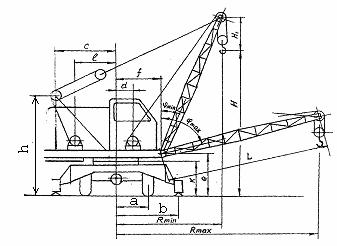
Пневмоколесные краны. Они имеют грузоподъемность 25, 40, 63 и 100 т. Большая грузоподъемность пневмоколесных кранов в сочетании со значительными высотой подъема (до 55 м) и вылетом крюка (до 38 м) обусловили их широкое использование на строительстве промышленных предприятий, сооружений, тепловых электростанций и установке технологического оборудования. На рис. 3.27 показана схема стрелового самоходного крана.
167
Рис.3.27. Схема стрелового самоходного крана
Исходя из основных размеров, принимается решение при эксплуатации о длине стрелы. Минимальный и максимальный углы наклона стрелы min иmax определяются из зависимостей
|
sin min |
|
Rmin f |
; sin max |
|
m e |
. |
|
|
|||||||||
|
|
|
|
|||||||||||||||
|
|
|
|
|
||||||||||||||
|
|
|
|
|
L |
|
|
|
|
|
|
|
|
|
L |
|
|
|
Изменяя значение угла , можно определить Ri |
и Qi |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
L |
|
|
|
|
|
|
|||
|
|
|
|
|
M |
îïð |
G |
ñòð |
|
|
|
sin |
i |
f b |
||||
|
|
|
|
|
|
|||||||||||||
R Lsin |
; |
Q |
|
|
2 |
|
|
|
|
|
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
i |
i |
|
|
i |
|
|
Lsin i f b |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
||||||||||
Опрокидывающий |
момент |
Mîïð |
|
относительно ребра опрокидывания, |
||||||||||||||
возникающий от веса груза Q и веса стрелы Gñòð , исходя из условия
обеспечения устойчивости при различных вылетах, должен быть величиной постоянной. Ветровая нагрузка Wãð на груз условно прикладывается к оголовку
стрелы и действует параллельно плоскости, на которой установлен кран
Wãð= ðÀãð,
где p распределенная ветровая нагрузка на единицу расчетной площади груза; Àãð расчетная площадь груза.
Распределенную ветровую нагрузку находят из выражения p qokc ,
где qo скоростной напор ветра на высоте 10 м от поверхности земли; ê поправочный коэффициент возрастания скоростного напора, имеющий в зависимости от высоты конструкции H следующие значения: до 10 м , ê 1,0; 10…20, ê 1,32; 20…30, ê 1,5; 30…40, ê 1,7; 40…50, ê 1,8; 50…60, ê 1,9;
ñ аэродинамический коэффициент, |
имеющий следующие значения: ферма и |
|
сплошная балка ñ 1,4; кабины |
кранов, грузы ñ 1,2; |
коэффициент |
перегрузки, равен 1,1; коэффициент, учитывающий динамический характер приложения ветровой нагрузки: для кранов можно принимать 1.
168
Скоростной напор в зависимости от скорости определяют по шкале Бофорта,
табл.3.1.
|
|
|
Таблица 3.1. |
|
|
|
|
Баллы по |
Характер ветра |
Скорость, м/с |
Скоростной напор, |
шкале |
|
|
Н/м2 |
Бофорта |
|
|
|
|
Слабый |
3,4…5,2 |
7 … 17 |
3 |
Умеренный |
5,3….7,4 |
18,…34 |
4 |
Свежий |
7,5 … 9,8 |
20… 35 |
5 |
Сильный |
9,9 … 12,4 |
61… 96 |
6 |
Шторм |
15,3 … 18,2 |
148 …210 |
8 |
Сильный шторм |
18,3… 21,5 |
210 …290 |
Пневмоколесный кран состоит из двух основных частей: поворотной и ходовой, соединенных между собой опорно-поворотным устройством. На поворотной части крана располагаются рабочее оборудование, силовая установка, механизм главного и вспомогательного подъема груза, механизм изменения вылета стрелы, механизм вращения поворотной части и кабина управления. Рабочим оборудованием крана служит основная решетчатая стрела, удлиненные вставками стрелы с управляемыми и неуправляемыми гуськами различных размеров, а также башенно-стреловое оборудование. Все механизмы крана имеют индивидуальный электрический привод постоянного тока по системе Г−Д. Силовая установка обеспечивает глубокое регулирование рабочих скоростей в широком диапазоне путем изменения напряжения генератора, питающего якори двигателей, что особенно существенно для механизмов подъема груза и передвижения крана при выполнении монтажных операций.
Ходовая часть крана состоит из сварной ходовой рамы, опирающейся на ведущие и управляемые мосты автомобильного типа, и выносных опор. Количество мостов (2...5) зависит от грузоподъемности крана. При большой грузоподъемности мосты крана объединяются в балансирные тележки с жесткой подвеской к ходовой раме. Управление передвижением из кабины машиниста и жесткая подвеска мостов ограничивают скорость передвижения крана до 18 км/ч. В рабочем положении кран опирается на выносные опоры. Допускается работа крана без выносных опор и передвижение его с грузом на крюке в соответствии с грузовой характеристикой крана.
На рис. 3.28 показан общий вид мощного пневмоколесного крана грузоподъемностью 100 т, схемы канатоведения при работе с основным и сменным оборудованием, характеристики грузоподъемности для некоторых его видов, а на рис. 3.29 − кинематические схемы силовой установки и механизмов.
Кран оборудован основной стрелой длиной 15 м. Длину последней с помощью секций можно увеличивать до 26, 25, 30, 40, 50 и 55 м. Стрелы

169
длиной 20...40 м оснащают неуправляемым гуськом; длиной 45...55 м − управляемым.
Рис. 3.28. Пневмоколесный кран грузоподъемностью 100 т:
а) – схема конструкции; б) — схема запасовки канатов механизмов главного подъема; в) – то же, вспомогательного подъема; г) – графики грузоподъемности; д) – схема запасовки канатов стрелоподъемного механизма; 1 – барабан лебедки главного подъема; 2 – то же, вспомогательного подъема
Гуськи крана состоят из отдельных секций длиной по 5 м каждая. При работе крана без гуська лебедки основного и вспомогательного подъемов используются для подъема основного груза; при оборудовании управляемым гуськом лебедка главного подъема обеспечивает изменение вылета гуська. Силовая установка состоит из дизеля, вращающего основной 2 и вспомогательный 3 генераторы, насоса 5 гидравлической системы управления выносными опорами. При длительной работе на площадке вместо дизеля используют электрический двигатель 4, питаемый от сети переменного тока. Основной генератор обеспечивает работу двигателей основного и вспомогательного подъемов, стрелоподъемного механизма и механизма передвижения. Вспомогательный генератор питает двигатель механизма вращения. Механизмы кранов состоят из рабочих двигателей, редукторов, соединительных муфт и тормозов и исполнительных органов (барабанов, зубчатых колес).
Кинематическая схема крана позволяет совмещать следующие операции: подъем и опускание груза на крюке главного подъема с поворотом крана; подъем и опускание стрелы с подъемом и опусканием груза; подъем и опускание груза крюком вспомогательного подъема с поворотом крана.