

ЛР10_Моделирование системы автоматического регулирования уровня в промышленном резервуаре
.pdfШкола Инженерная школа энергетики НОЦ И.Н. Бутакова
Направление 13.03.01 Теплоэнергетика и теплотехника
Отчет по лабораторной работе по дисциплине «Управление техническими системами»
«Моделирование системы автоматического регулирования уровня в промышленном резервуаре»
Выполнил студент |
|
|
|
гр. 5Б05 |
|
|
Цыбиков А.А. |
|
(дата, подпись) |
||
Проверил: |
|
|
|
|
к.т.н., доцент ИШЭ |
|
|
|
Атрошенко Ю.К. |
|
|
(дата, подпись) |
||
Томск 2022
Цель работы
Разработать математическую модель одноконтурной системы
регулирования уровня в резервуаре на основе регулятора непрерывного
действия.
Таблица 1 – Вариант задания
№ вар. |
, м |
, м2 |
− |
+(7#2) |
Требования к |
Параметры |
|
|
|
||||||
|
3 |
|
|
|
качеству |
регулятора |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
2 |
2.6 |
80 |
1.2 |
1 3 5 2 0 4 2 |
ε=0; tр≤50 c. |
kп=5; kи=2 |
|
σ≤50%; ψ≥0.8 |
|||||||
|
|
|
|
|
|
||
|
|
|
|
|
|
|
Порядок выполнения работы
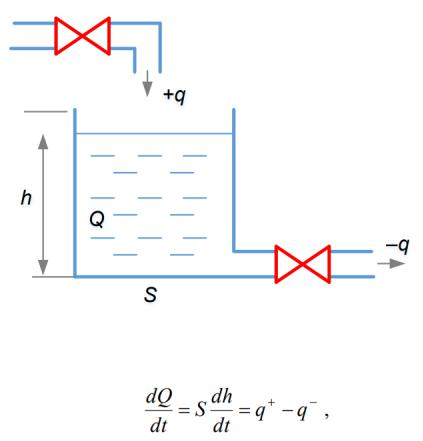
В технологическом аппарате (рис. 1) требуется поддерживать постоянным уровень hз рабочей среды в соответствии с заданными требованиями к автоматической системе регулирования.
Рисунок 1 – Схема технологического аппарата
Объем воды в резервуаре Q h S . Тогда изменение объема будет
2
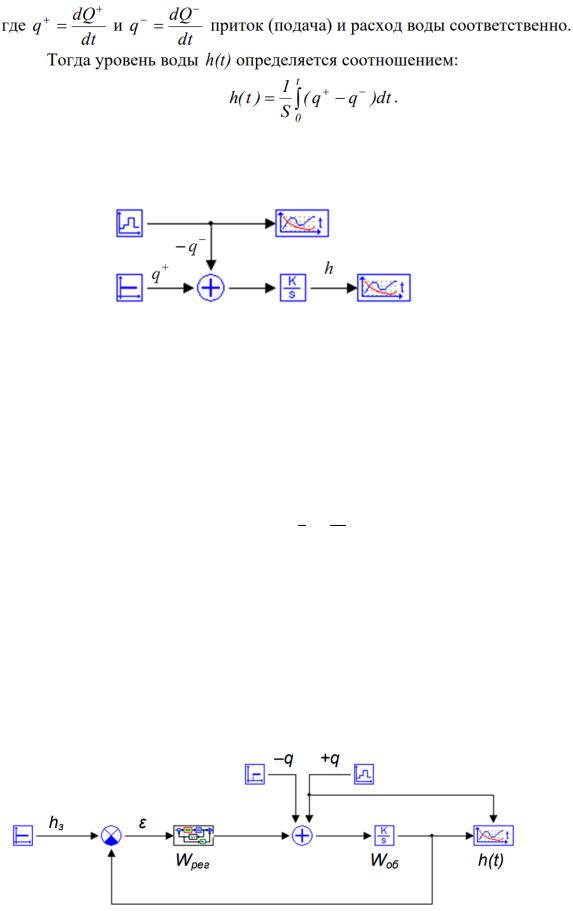
Структурная схема реализации этого соотношения в программе МВТУ показана на рисунке 2.
Рисунок 2 – Структурная схема модели технологического аппарата
В блоке +q в соответствии с индивидуальным вариантом задается подача
(приток) среды. В блоке –q с помощью кусочно-постоянной функции задается расход среды. Его величина изменяется в различные промежутки времени.
Коэффициент усиления интегратора, описывающего работу резервуара,
определяется площадью резервуара: об = 1 = 801 = 0.0125.
Моделирование АСР
Формируется блок задания уровня hз. Затем устанавливается устройство,
сравнивающее текущий уровень h с его заданным значением hз, для этого вводится отрицательная обратная связь (рис. 3).
Рисунок 3 – Структурная схема моделируемой системы
3
Выходной сигнал элемента сравнения (ошибка регулирования ε=h–hз)
подается на вход регулятора (пропорционально-интегральный закон).
С помощью элемента «Макроблок» задаются структура и параметры ПИ-регулятора.
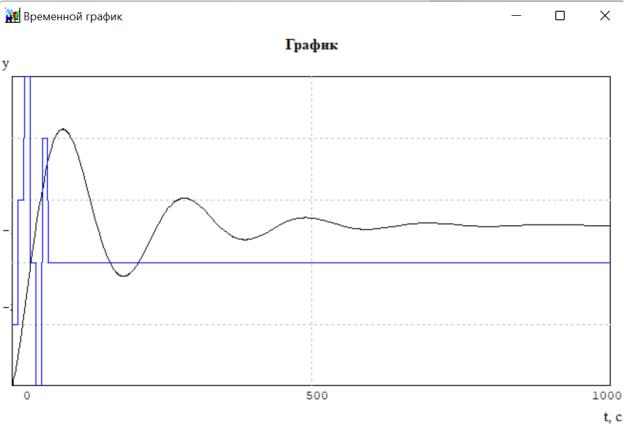
В соответствии с индивидуальным вариантом задаём первое приближение параметров ПИ-регулятора:
Рисунок 4 – График переходной характеристики
|
Определяем прямые оценки качества: |
|
|
|||||||||
1) |
Динамическая ошибка: 1 = 1,55; |
|
|
|
|
|
||||||
2) |
Перерегулирование: = |
|
1∙100% |
|
= |
|
1,55∙100% |
= 59,6%; |
||||
|
(∞) |
2.6 |
|
|||||||||
|
|
|
|
|
|
|
||||||
3) |
Статическая ошибка: ст = − (∞) = 2.6 − 2.6 = 0, где – величина |
|||||||||||
|
сигнала задания. |
|
|
|
|
|
|
|
|
|
|
|
4) |
Степень затухания: Ѱ = |
1− 2 |
= |
|
1,55−0,4 |
= 2,67, |
||||||
|
1 |
|
|
0,43 |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||
5) |
Время регулирования: р = 100 с. |
|
|
|
|
|
||||||
|
|
|
|
|
|
4 |
|
|
|
|
|
|
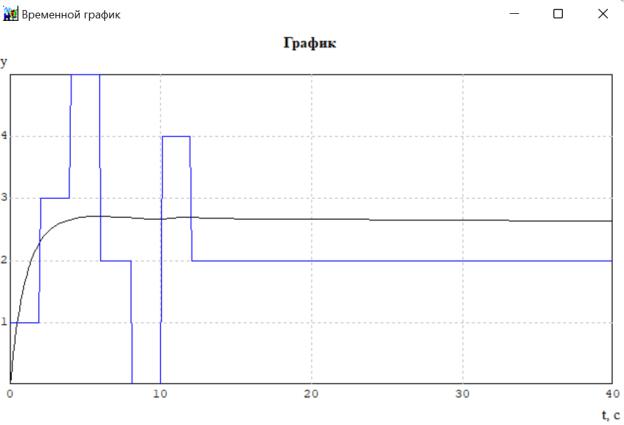
Откорректируем параметры ПИ-регулятора для обеспечения
соблюдения требований к системе. kп=80, kи=20.
Рисунок 5 – График переходной характеристики
|
Определяем прямые оценки качества: |
|
|
||||||||
1) |
Динамическая ошибка: 1 = 0,4; |
|
|
|
|
||||||
2) |
Перерегулирование: = |
|
1∙100% |
|
= |
0,4∙100% |
= 15,4%; |
||||
|
(∞) |
2.6 |
|
||||||||
|
|
|
|
|
|
|
|||||
3) |
Статическая ошибка: ст = − (∞) = 2.6 − 2.6 = 0, где – величина |
||||||||||
|
сигнала задания. |
|
|
|
|
|
|
|
|
|
|
4) |
Степень затухания: Ѱ = |
1− 2 |
= |
|
0,4−0,04 |
= 0,9, |
|||||
|
1 |
|
|
0,4 |
|
||||||
|
|
|
|
|
|
|
|
|
|
||
5) |
Время регулирования: р = 8 с. |
|
|
|
|
|
|
||||
5
Вывод
Вданной работе была разработана математическая модель одноконтурной системы регулирования уровня в резервуаре на основе регулятора непрерывного действия. Проведена корректировка параметров ПИ-регулятора для обеспечения соблюдения требований к системе.
Восновном стабильность переходного процесса зависела от показателя
kп в ПИ-регуляторе.
6