

1462
.pdfУДК 656.073.4
РАЗРАБОТКА УНИВЕРСАЛЬНОЙ СИСТЕМЫ ДИНАМИЧЕСКОГО ВЗВЕШИВАНИЯ ОТХОДОВ
Н.В. Лобов, Д.В. Мальцев, Е.М. Генсон
Пермский национальный исследовательский политехнический университет, Россия
Представлены исследования, направленные на разработку универсальной системы динамического взвешивания отходов. Приведены анализ конструкции мусоровоза КО-427-01 и методика загрузки отходов. Определены доработки системы динамического взвешивания отходов, необходимые для ее установки на мусоровоз КО-427-01.
Ключевые слова: определение массы ТБО, мусоровоз, давление рабочей жидкости, динамика.
Гидравлические манипуляторы благодаря своей универсальности получили широкое распространение в коммунальной технике. Они применяются на всех типах современных мусоровозов: с боковой загрузкой, с задней загрузкой, контейнерных. На сегодняшний день также остро стоит проблема учета движения отходов, поступивших от потребителей.
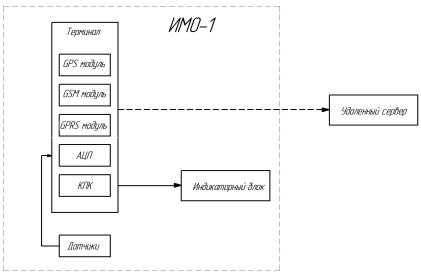
Ранее была разработана система ИМО-1 [1], которая позволяет определять массу отходов, загружаемых мусоровозом в местах погрузки, по давлению рабочей жидкости в гидросистеме мусоровоза [2]. Исследования работы системы проводились на мусоровозе с боковой загрузкой МК-20. Установлено, что существует возможность динамического взвешивания отходов.
По данным последних наблюдений, проведенных на полигонах г. Перми, количество мусоровозов с задней загрузкой стремительно растет и составляет на сегодняшний день более 50 % всего парка мусоровозов. Следовательно, исследования, направленные на разработку универсальной системы динамического взвешивания отходов, применимой к любым видам мусоровозов, являются актуальными.
Для определения возможности динамического взвешивания отходов на мусоровозах с задней загрузкой необходимо провести анализ конструкции их подъемного устройства и методики загрузки баков.
91

Рис. 1. Мусоровоз КО-427
Конструкция современных мусоровозов с задней загрузкой принципиально одинаковая.
Объектом исследования был выбран мусоровоз КО-427-01 [3], произведенный на предприятии ОАО «Мценский завод “Коммаш”» г. Мценск (рис. 1). Мусоровоз КО-427-01 на шасси КАМАЗ 65115 предназначен для сбора твердых бытовых отходов, их уплотнения, транспортировки и механизированной выгрузки в местах утилизации. Мусоровоз имеет высокую степень уплотнения (до 6) и универсальный захват-опрокидыватель (рис. 2)
для |
контейнеров объемом от |
0,12 |
м3 до 1,1, а также порталь- |
ный опрокидыватель для кон- |
|
тейнеров объемом до 8,0 м3. |
|
|
Процесс подъема и опроки- |
дывания бака с ТБО представлен
на рис. 3.
Рис. 2. Универсальный захват-опроки- дыватель мусоровоза КО-420-01
92

Рис. 3. Процесс подъема и опрокидывания бака с ТБО
При подъеме контейнеров объемом 8,0 м3 на мусоровозе применяется портальный опрокидыватель 1. Контейнер закрепляется на опрокидывателе с помощью цепей. Подъем и опрокидывание контейнера осуществляется с помощью двух гидроцилиндров 2 двухстороннего действия, установленных по обе стороны портального опрокидывателя. Подъем контейнеров объемом от 0,12 до 1,1 м3 происходит аналогично
спомощью двух захватов 3, приводимых в действие также гидроцилиндрами двустороннего действия. Таким образом, на данном типе мусоровозов имеется возможность осуществления измерения массы бака
сТБО по давлению рабочей жидкости.
Подъем бака с ТБО осуществляется с помощью двух гидроцилиндров. При неравномерном распределении мусора в баке давление в гидроцилиндрах будет разным, следовательно, необходима установка двух датчиков давления, по одному на каждый гидроцилиндр. Также требу-
93
ется оптимизация алгоритма фильтрации данных с учетом неравномерности распределения мусора в баке.
Выводы
1.Система взвешивания отходов ИМО-1 универсальна.
2.Для использования системы на мусоровозах с задней загрузкой требуется установка дополнительного датчика давления, а также оптимизация алгоритма фильтрации данных.
Список литературы
1.Пат. 143665 Российская Федерация, МПК G01G 19/08. Устройство для определения массы груза, загружаемого в транспортное средство подъемным устройством / Лобов Н.В., Фомина Н.И., Маль-
цев Д.В., Генсон Е.М. – № 2012127537/28; заявл. 02.07.2012; опубл. 27.07.2014, Бюл. № 21. – 3 с.
2.Мальцев Д.В. Разработка аппаратно-программного комплекса для автоматизированного взвешивания грузов на основе динамики тепломеханических систем // Инновации в науке, технике и технологиях: материалы всерос. науч.-практ. конф. (Ижевск, 28–30 апреля 2014 г.). – Ижевск: Изд-во Удмурт. гос. ун-та, 2014. – С. 165–166.
Об авторах
Лобов Николай Владимирович (Пермь, Россия) – доктор техни-
ческих наук, профессор кафедры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990, г. Пермь, Комсомольский пр., 29; e-mail: lobov@ pstu.ru).
Мальцев Дмитрий Викторович (Пермь, Россия) – аспирант ка-
федры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990,
г. Пермь, Комсомольский пр., 29; e-mail: Saint89@mail.ru).
Генсон Евгений Михайлович (Пермь, Россия) – аспирант кафедры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990,
г. Пермь, Комсомольский пр., 29; e-mail: Genson4@yandex.ru).
94
УДК 656.073.4
ЭКСПЕРИМЕНТАЛЬНОЕ ОПРЕДЕЛЕНИЕ МАССЫ ТВЕРДЫХ БЫТОВЫХ ОТХОДОВ В МЕСТАХ СБОРА ВО ВРЕМЯ ЗАГРУЗКИ В КОММУНАЛЬНЫЙ ТРАНСПОРТ
Н.В. Лобов, Д.В. Мальцев, Е.М. Генсон
Пермский национальный исследовательский политехнический университет, Россия
Изложена методика определения массы отходов в местах сбора во время загрузки в коммунальный транспорт. Представлены схема разработанного программно-аппаратного комплекса, серверное программное обеспечение, результаты натурного эксперимента.
Ключевые слова: определение массы ТБО в местах погрузки, мусоровоз, гидросистема мусоровоза, передача данных на удаленный сервер, методика взвешивания.
Проблема сбора и вывоза твердых бытовых отходов (ТБО) была и остается актуальной в России и за рубежом. Низкая культура обращения с отходами у населения и отсутствие должного контроля привело к тому, что в мусорные баки попадают как бытовые отходы, так и строительный мусор. Подъем баков со строительным мусором либо невозможен, либо заканчивается поломкой гидравлического оборудования мусоровоза. Отсутствие технической возможности определения степени загруженности кузова мусоровоза, частые поломки гидравлического оборудования, необоснованное формирование тарифов на сбор и транспортировку, а также большое количество несанкционированных свалок свидетельствуют об актуальности проблемы определения массы ТБО, загружаемых в мусоровоз в местах сбора.
Анализ современных публикаций и исследований показал, что наиболее оптимальный способ фиксации массы отходов в местах сбора – это определение массы по величине давления рабочей жидкости в гидросистеме мусоровоза [1]. Исследован состав парка мусоровозов города с миллионным населением [2]. Для дальнейших исследований выбран мусоровоз с боковой загрузкой отходов как наиболее распространенный.
95
Исследован порядок работы гидравлического оборудования мусоровоза с боковой загрузкой отходов [3]. С помощью разработанной физической модели гидросистемы мусоровоза (лабораторный стенд) определены два наиболее значимых фактора, влияющих на величину давления рабочей жидкости [2]:
–масса груза, поднимаемого манипулятором, кг;
–температура рабочей жидкости, °С.
Выбрано и обосновано положение манипулятора, при котором необходимо производить взвешивание [4].
Для взвешивания отходов в местах сбора наиболее рациональным является использование систем, встроенных в автомобиль, поэтому на основе проведенных исследований разработан программно-аппаратный комплекс (рис. 1).
Рис. 1. Состав и схема работы аппаратно-программного комплекса
Комплекс состоит из следующего оборудования: терминал, индикаторный блок, датчики, провода [5].
Датчики измеряют параметры рабочей жидкости: давление и температуру. Терминал предназначен для сбора и обработки показаний датчиков, геопозиционирования, хранения и передачи информации на удаленный сервер через Интернет. Он устанавливается в кабине мусоровоза. Анализируя показания датчиков, терминал осуществляет управление индикаторным блоком. Индикаторный блок устанавливает-
96

ся над рычагами управления гидравлическим оборудованием. В случае превышения предельно допустимой массы бака с отходами индикаторный блок с помощью световой и звуковой сигнализация оповещает водителя об аварийном режиме работе оборудования. Внешний вид терминала и индикаторного блока представлен на рис. 2.
Рис. 2. Внешний вид прибора: 1 – терминал; 2 – индикаторный блок
На основе экспериментальных данных была разработана методика определения массы бытовых отходов, которая предполагает следующие действия:
1)захватить бак с ТБО при помощи манипулятора;
2)поднять бак на высоту 10–15 см от площадки;
3)остановить манипулятор, затем с помощью кнопки на индикаторном блоке перевести программно-аппаратный комплекс в режим измерений;
4)зафиксировать массу в течение 1–2 с и с помощью кнопки на
индикаторном блоке перевести программно-аппаратный комплекс
врежим мониторинга;
–если масса бака с отходами не превышает предельно допустимую массу – на блоке загорится зеленый индикатор, можно осуществлять дальнейший подъем;
–если масса бака с отходами превышает предельно допустимую массу – на блоке загорится красный индикатор и прозвучит звуковой сигнал, необходимо незамедлительно опустить бак на площадку;
5) если используются нестандартные баки, необходимо при опускании пустого бака также производить его взвешивание. Для корректного определения массы бака с ТБО необходимо, чтобы при взвешивании манипулятор всегда находился в одинаковом положении.
По изложенной методике был проведен эксперимент: бак с ТБО взвешивался на поверенных складских весах с диапазоном измерений
97
от 0 до 500 кг. Относительная погрешность измерений прибора составила не более 5 %.
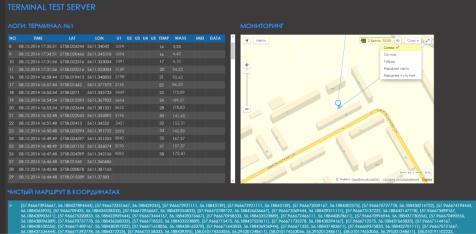
Разработано серверное программное обеспечение, позволяющее определять маршрут мусоровоза, координаты мест сбора отходов, массу отходов из каждого бака, количество баков. Все собранные данные были переданы на сервер (рис. 3).
Рис. 3. Серверное программное обеспечение
Выводы
1.Разработан и изготовлен опытный образец программно-аппарат- ного комплекса для определения массы грузов, поднимаемых на борт автомобиля, и координат места загрузки с последующей передачей данных через Интернет на удаленный сервер.
2.Разработано серверное программное обеспечение.
3.Проведены испытания в реальных условиях эксплуатации, относительная погрешность измерений не превышает 5 %.
Список литературы
1.Мальцев Д.В., Лобов Н.В., Фомина Н.И. Выбор рационального способа определения массы перевозимого груза мусоровозным транспортом // Вестник Пермского государственного технического универ-
ситета. – 2011. – № 1. – С. 119–123.
2.Мальцев Д.В., Лобов Н.В., Генсон Е.М. Результаты исследования физической модели гидросистемы мусоровоза // Журнал СДМ. – 2014. – № 5. – С. 2–5.
98
3.Мальцев Д.В., Лобов Н.В., Генсон Е.М. Определение массы твердых бытовых отходов, загружаемых коммунальным транспортом в местах сбора с использованием средств спутниковой навигации // Автотранспортное предприятие. – 2012. – № 2. – С. 45–48.
4.Мальцев Д.В., Лобов Н.В., Генсон Е.М. Положение манипулятора мусоровоза и степень его нагруженности // Автомобильная промыш-
ленность. – 2014. – № 10. – С. 18–19.
5.Пат. 143665 Российская Федерация, МПК G01G 19/08. Устройство для определения массы груза, загружаемого в транспортное средство подъемным устройством / Лобов Н.В., Фомина Н.И., Мальцев Д.В., Генсон Е.М. – №2012127537/28; заявл. 02.07.2012; опубл. 27.07.2014, Бюл. № 21. – 3 с.
Об авторах
Лобов Николай Владимирович (Пермь, Россия) – доктор техни-
ческих наук, профессор кафедры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990, г. Пермь – ГСП, Комсомольский пр., 29; e-mail: lobov@pstu.ru).
Мальцев Дмитрий Викторович (Пермь, Россия) – аспирант ка-
федры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990,
г. Пермь, Комсомольский пр., 29; e-mail: Saint89@mail.ru).
Генсон Евгений Михайлович (Пермь, Россия) – аспирант кафедры «Автомобили и технологические машины», Пермский национальный исследовательский политехнический университет (614990,
г. Пермь, Комсомольский пр., 29; e-mail: Genson4@yandex.ru).
99
УДК 629.067
АВТОМАТИЗИРОВАННАЯ СИСТЕМА ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОЙ КОЛОННЫ
В.В. Ляхова, Е.В. Свиридов
Пермский военный институт внутренних войск МВД России, Россия
Предлагается конструкция радиолокационной системы предотвращения столкновения автомобилей, функционирующая на основе определения безопасной дистанции между транспортными средствами в автомобильной колонне, автомобилем-лидером и потенциально опасным объектом.
Ключевые слова: автомобильная колонна, столкновение, скорость.
В последнее время в целях обеспечения безопасности движения значительное внимание уделяется автоматизации процесса управления транспортными средствами [1–5].
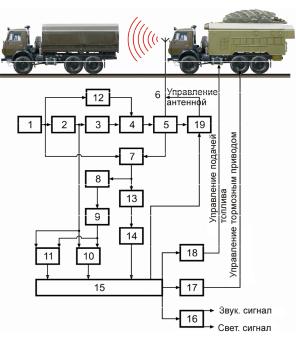
Функциональная схема предлагаемой системы предотвращения столкновений транспортных средств в колонне представлена на рисунке.
Рис. Функциональная схема системы предотвращения столкновений АТ в колонне
100