

517_Noskova, N. V. Besprovodnye Telekommunikatsionnye Seti Standarta DECT
.pdfДалее, полученная разность квантуется, чтобы получить значение квантованной разности dq(k), которое можно представить следующим образом:
dq(k) = d(k)-e(k),
где e(k) представляет собой ошибку квантования, получающуюся вследствие аппроксимации аналоговой величины d(k) цифровой величиной dq(k). Таким образом, входные данные предсказателя состоят из квантованных разностей и выходных данных предыдущего предсказания:
mq(k) = m'q(k) +dq(k) = [m(k) - d(k)] + [d(k) + q (k)] = m(k) + q(k).
Видно, что mq(k) является квантованным аналогом m(k). Таким образом, как и было задумано, на вход предсказателя подаются значения mq(k), необходимые для работы приемника.
Логика приемника показана на рисунке 2.2б. Часть приемника, которая заключена в пунктирную рамку, ничем не отличается от заключенного в пунктирную рамку участка передатчика. На вход этих участков подается одно и то же значение, dq(k), следовательно, на выходе получаются одинаковые значения mq(k). Затем на приемнике выходные данные этого участка пропускаются через фильтр, вследствие чего получается аналоговый сигнал, являющийся приближением исходного аналогового сигнала.
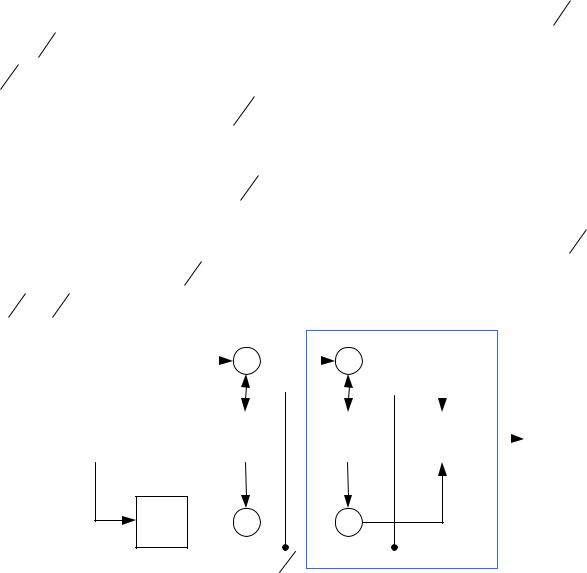
Как правило, предсказатель – это реализованная с использованием регистров сдвига линейная взвешенная сумма предыдущих выборок и задержек, равных интервалу выборки (рисунок 2.3).
mq(k) Задержка |
|
Задержка |
|
|
Задержка |
Тз |
|
Тз |
|
|
Тз |
А1 |
× |
А2 |
× |
АN-1 × |
АN × |
mq(k)
∑
Рисунок 2.3 – Схема линейного предсказателя
N
mq k Ai mq k i .
i 1
11

Адаптивная дифференциальная импульсно-кодовая модуляция
Производительность схемы DPCM можно повысить, если использовать адаптивные методы предсказания и квантования, которые позволят предсказателю и устройству квантования адаптироваться к изменяющимся характеристикам кодируемой речи.
На рисунке 2.4 показана базовая логика ADPCM. Передатчик преобразует поток оцифрованной речи со скоростью 64 кбит/с в сжатый поток со скоростью 32 кбит/с. Общая блок-схема аналогична схеме, приведенной для модуляции DPCM. В этом случае адаптивный предсказатель использует не только значения своих предыдущих выходных данных, но и значения предыдущих квантованных разностей. В предсказателе и в устройстве квантования параметры алгоритмов регулируются динамически, в зависимости от статистических свойств предыдущих выборок. Как и при использовании схемы DPCM, ядро декодера – копия части логики кодера.
64 Кбит/с |
Разностный |
|
|
|
|
|
32 кбит/с |
||
PCM |
+ |
сигнал |
|
|
|
|
|
ADPCM |
|
s(k) |
|
d(k) |
Адаптивный |
|
|
|
|
l(k) |
|
|
∑ |
|
|
|
|
||||
|
|
|
АЦП |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Обратный |
|
Оценка |
|
|
|
|
|
|
адаптивный |
|
|
|
|
|
|
|
|
АЦП |
||
|
сигнала |
|
|
|
|
+ |
|
||
|
|
se(k) |
|
|
Восстановленный |
|
|
|
|
|
|
|
Адаптивный |
|
|
|
|
||
|
|
|
|
сигнал |
∑ |
|
|
Квантованный |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
предсказатель |
|
|
|
разностный |
|
|
|
|
|
|
|
|
+ |
||
|
|
|
|
|
|
|
|
сигнал |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
d(k) |
|
|
|
|
а) кодер ADPCM |
|
|
|
|
|
|
|
Квантованный |
|
|
|
32 Кбит/с |
Обратный |
разностный |
|
Восстановленный |
64 кбит/с |
сигнал |
|
сигнал |
|||
ADPCM |
+ |
PCM |
|||
|
адаптивный |
|
∑ |
|
|
|
АЦП |
|
+ |
|
|
|
|
|
|
Адаптивный |
|
|
|
|
Оценка |
предсказатель |
|
|
|
|
|
|
|
|
|
|
сигнала |
|
|
|
|
б) декодер ADPCM |
|
||
Рисунок 2.4 – Упрощенная схема передатчика и приемника ADPCM
12

Адаптивное устройство квантования (аналого-цифрового преобразователя – АЦП) в качестве входных данных принимает значение разности d(k) между модулированным сигналом s(k) и оценкой этого сигнала sf(k), а на выходе выдает 4-битовый модулированный сигнал ADPCM I(k).
Соответствующее отображение значений приведено в первых двух столбцах таблицы 2.1. До квантования d(k) представляется в виде логарифма по основанию 2, масштабируется на величину y(k) – множитель адаптации, основанный на скорости изменения сигнала от выборки к выборке. Полученный результат представляется как четвертый бит, которые и передаются как сигнал
ADPCM.
Таблица 2.1 – Нормированные характеристики входа/выхода устройства квантования ADPCM
Диапазон нормированных |
Выход адаптивного |
Выход обратного |
|
входных значений АЦП, |
адаптивного АЦП, |
||
АЦП, I(k) |
|||
log2|d(k)| - y(k) |
dq(k) |
||
|
|||
[3,12; + ∞) |
7 |
3,32 |
|
[2,72; 3,12) |
6 |
2,91 |
|
[2,34; 2,72) |
5 |
2,53 |
|
[1,91; 2,34) |
4 |
2,13 |
|
[1,38; 1,91) |
3 |
1,66 |
|
[0,62; 1,38) |
2 |
1,05 |
|
[-0,98; 0,62) |
1 |
0,031 |
|
(- ∞; -0,98) |
0 |
-∞ |
На вход обратного адаптивного АЦП подается 4-битовый сигнал I(k), а на выходе получается разностный сигнал dq(k), который затем используется в качестве входного сигнала для адаптивного предсказателя. Это отображение представлено во втором и третьем столбцах таблицы 2.1.
Адаптивный предсказатель имеет структуру линейного предсказателя (рисунок 2.4), который, впрочем, сложнее, чем предсказатель схемы DPCM. Предсказатель для схемы ADPCM является комбинацией рекурсивного фильтра второго порядка и нерекурсивного фильтра шестого порядка, что можно представить следующим уравнением:
2 |
6 |
|
Se k Ai |
k i Se k i Bi |
k i dq k i , |
i 1 |
i 1 |
|
где коэффициенты А и В обновляются с помощью алгоритмов адаптации к скорости изменения выборок se(k) и dq(k). Таким образом, адаптивный предсказатель настраивается на скорость изменения разностей выборок, а также на скорость изменения оценочных значений сигнала.
13
2.2 Модуляция GMSK
В системах стандарта DECT используется гауссовская манипуляция с ми-
нимальным сдвигом ММС (Gaussian Minimum Shift Keying – GMSK) (рисунок
2.5). Этот метод представляет собой частотную манипуляцию, при которой несущая частота дискретно – через интервалы времени, кратные периоду Т бито-
вой модулирующей последовательности, принимает значения fH |
f0 F |
4 |
или |
||||||||
|
|
|
|
|
|
|
|
|
|
||
fВ f0 |
F |
4 |
, где f0 – центральная частота используемого частотного канала, a |
||||||||
|
|
|
|
|
|
|
|
|
|
||
F 1 |
– частота битовой последовательности [7]. |
|
|
|
|||||||
Т |
|
|
|
fН |
fВ |
|
|
|
|
|
|
Разнос частот f |
2 |
– минимально возможный, |
при котором |
||||||||
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
||
обеспечивается ортогональность колебаний частот fH и fB на интервале Т длительности одного бита; при этом за время Т между колебаниями частот fH и fB
набегает разность фаз, равная 2 . Таким образом, термин «минимальный сдвиг» в названии метода модуляции относится, в указанном выше смысле, к
сдвигу частоты. Поскольку модулирующая частота в этом случае равна |
F |
, а |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
девиация частоты – |
F 4 , индекс |
частотной |
|
модуляции составляет |
|||||||||||||||||||
т F 4 F 2 0,5 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Модулятор 4-ФМ |
|
|
|||||
|
|
|
|
|
|
х |
|
|
х |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
S |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
K |
|
|
90 |
|
|
|
|
K |
|
|
|
+ |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Т  х
х  х
х
cos 0t
cos t 2T
Рисунок 2.5 Структурные схемы модулятора ММС
Термин «гауссовская» в названии метода модуляции соответствует дополнительной фильтрации модулирующей битовой последовательности относительно узкополосным гауссовским фильтром; именно эта дополнительная фильтрация отличает метод GMSK от метода MSK (Minimum Shift Keying – манипуляция с минимальным сдвигом).
Метод MSK иногда рассматривают как метод квадратурной фазовой манипуляции со смещением (OQPSK), но с заменой прямоугольных модулирующих импульсов длительностью 2T полуволновыми отрезками синусоид или косинусоид ( cos t / 2T ). В методе MSK входная последовательность битовых им-
14

пульсов модулятора разбивается на две последовательности, состоящие соответственно из нечетных и четных импульсов, и модулированный сигнал (выходной сигнал модулятора) на протяжении очередного n-го бита определяется выражением, зависящим от состояния текущего n и предшествующего (п - 1)-го бита:
S t cos |
t |
cos |
t sin |
t |
sin |
t cos |
t |
t |
, |
n 1 T t nT . |
|||
|
|
|
|||||||||||
|
|
|
0 |
|
|
|
0 |
|
0 |
|
|
|
|
|
2T |
|
|
2T |
|
|
|
|
2T |
|
|||
Здесь 0 2f0 – центральная частота канала, а знаки «плюс» или «ми-
нус» определяются модулирующей импульсной последовательностью.
Из этого выражения следует, что текущая фаза модулированного сигнала
t t |
2Т |
, т. е. набег фазы на интервале Т одного бита |
|
2 |
, а мгновен- |
|||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ная частота, |
как производная от фазы t d t |
|
|
|
2Т |
2 |
f |
|
F |
4 |
, т. е. |
|||
|
|
|
|
dt |
0 |
|
|
|
|
0 |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
мгновенная частота принимает одно из двух значений - fH или fB, постоянное на протяжении бита [7].
Таким образом, изменение знака начальной фазы во второй части выражения означает переход от fH к fB или обратно. Изменение же общего знака вы-
ражения, эквивалентное изменению начальной фазы на 2 , позволяет сохра-
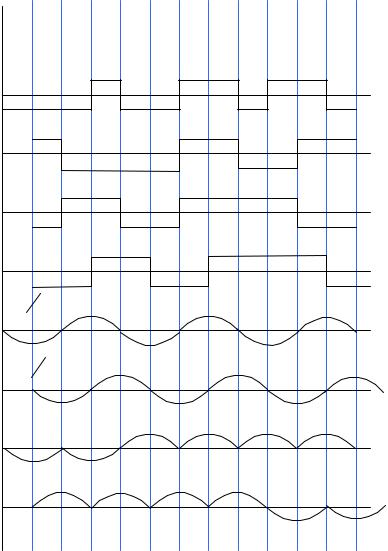
нить непрерывность фазы при изменении частоты. Временные диаграммы работы модулятора минимальным сдвигом приведены на рисунке 2.6.
Здесь v(t) – входной цифровой сигнал с длительностью символа Т; второй и третий графики дают соответственно последовательности нечетных a(t) и четных b(t) бит входной последовательности, причем длительность каждого бита равна 2Т; пятый и шестой графики показывают форму сигналов двух квадратурных каналов I и Q, получаемых как произведения функций a(t) и b(t) соответ-
ственно на квадратурные низкочастотные сигналы sin t 2Т и cos t 2Т . Обра-
тим внимание на скачкообразные изменения фазы этих сигналов (в моменты изменений модулирующих знаков a(t) и b(t).
Окончательный модулированный сигнал согласно первой части выражения получается как результат перемножения модулирующих сигналов квадратурных каналов с соответствующими несущими sin(ω0t) и cos(ω0t) и суммирования полученных произведений. Введение гауссовского фильтра приводит к сужению главного лепестка и снижению боковых лепестков спектра на выходе модулятора, чем обеспечивается допустимый уровень помех по смежным частотным каналам.
15
2.3 Принцип множественного доступа с разделением по времени, дуплекса с разделением по времени
Радиоинтерфейс основывается на способе радиодоступа с использованием нескольких несущих, принципа множественного доступа с разделением по времени, дуплекса с разделением по времени МС/TDМА/TDD: для организации связи между портативной и стационарной частью в выделенном диапазоне частот организуется 10 частотных каналов (МС). На рисунке 2.7 приведены значения несущих частот.
V(t) |
|
|
|
|
t |
a(t) |
|
|
|
|
t |
b(t) |
|
|
|
|
t |
b1(t) |
|
|
|
|
t |
cos t |
|
|
2T |
|
t |
|
|
|
sin t |
|
t |
2T |
|
|
I(t) |
|
|
|
|
t |
Q(t) |
|
|
|
|
t |
-2Т -Т |
0 |
Т 2Т 3Т 4Т 5Т 6Т 7Т 8Т |
Рисунок 2.6 – Временные диаграммы при формировании сигналов ММС
Дуплекс с временным разделением (TDD)
В схеме TDD, известной также как уплотнение с временным сжатием (time-compression multiplexing – ТСМ), в любой момент времени передача
16
данных ведется только в одном направлении, а направления передачи чередуются. Ниже последовательно рассматриваются схема TDD и TDD – TDMA.
Чтобы с помощью обычной схемы TDD получить необходимую абоненту скорость передачи данных поток битов сначала разделяется передатчиком на равные сегменты, которые сжимаются во времени до более высоких скоростей передачи данных и передаются в форме пакетов, а принимающая сторона затем восстанавливает исходную скорость передачи данных. Между передачей пакетов в противоположных направлениях имеется короткий перерыв, нужный для установления канала связи. Таким образом, реальная скорость передачи данных в канале должна быть более чем в два раза выше, чем скорость передачи данных, требуемая двумя конечными системами [3].
|
|
|
|
|
Разнос |
|
|
|
|
|
|
Р |
|
|
|
каналов |
|
|
|
|
|
Выходная РЧ |
|
|
|
1,728 МГц |
|
|
|
|
||
|
|
|
|
|
|
|
|
|||
мощность |
|
|
|
|
|
|
|
|
|
|
250 мВт (24 дБм) |
9 |
8 |
7 |
6 |
5 |
4 |
3 |
2 |
1 |
0 |
Чувствительность |
|
|
|
|
|
|
|
|
|
Динамический |
|
|
|
|
|
|
|
|
|
диапазон RSSI |
|
приемника |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
60 дБ |
|
-83 дБм |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(от -93 дБм |
|
(-86 дБм для GAP) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
до -33 дБм) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
1881,792 |
|
1886,769 |
1892,160 |
|
1897,344 |
||||
|
|
1883,520 |
|
1888,704 |
|
|
1893,888 |
|
||
|
|
|
1885,248 |
1890,432 |
|
|
1895,616 |
|||
Рисунок 2.7 – Организация базового частотного диапазона DECT
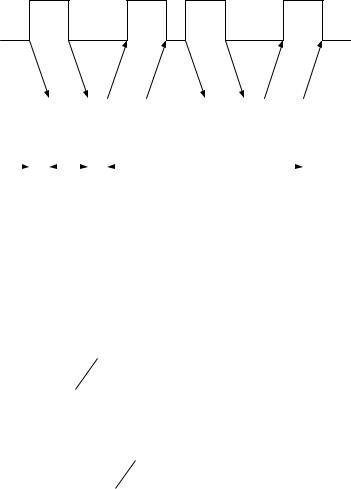
На рисунке 2.8 показана хронологическая схема передачи. Право передачи данных периодически переходит от одной стороны к другой. При этом каждая сторона отправляет блоки некоторой фиксированной длины, передача которых занимает время Тb (линейная функция числа битов в блоке). Для распространения сигнала от передатчика к приемнику требуется время Тр (линейная функция расстояния между передатчиком и приемником).
Наконец, для обращения канала введено защитное время Ts. Таким образом, время, требуемое для отправки одного блока, равно Tр Тb Tg . Кроме того, поскольку две стороны должны передавать данные по очереди, скорость передачи блоков любой стороной можно записать как 1 / 2 Tр Тb Tg . Эту ве-
личину можно связать с эффективной скоростью передачи данных, R, с которой ведут свои передачи обе стороны.
17
X1 |
Y1 |
X2 |
Y2 |
Базовая станция
|
|
|
|
|
X1 |
|
|
Y1 |
|
X2 |
|
Y2 |
|
|||
Микротелефон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tp |
|
|
Tb |
|
|
Tg |
Время |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Tg - задержка распространения
Рисунок 2.8 – Передача данных с помощью дуплекса с временным разделением
Пусть размер блока равен В бит, а требуемое значение скорости передачи равно R бит/с. Тогда эффективное число битов, передаваемых в секунду, будет
R B 2 Tp Tb Tg .
Реальную скорость передачи данных в среде А, легко записать как
A B Tb .
Из двух последних формул получаем
|
|
T |
p |
T |
g |
|
|
|
|
|
|
||
|
|
|
|
|||
A 2R 1 |
|
|
Tb |
|
. |
|
|
|
|
|
|
|
Таким образом, реальная скорость передачи данных по каналу связи более чем вдвое превышает эффективную скорость передачи, которую наблюдают сообщающиеся стороны. Выбор размера блока В, диктуется противоречивыми требованиями к системе. По мере увеличения значения В снижается реальная скорость передачи данных А. В этом случае упрощается реализация системы. С другой стороны, повышение размеров блока сопровождается увеличением времени задержки из-за необходимости буферизации, что нежелательно при передаче речи.
Например, среди стандартных интерфейсов, определенных для сетей
ISDN (Integrated Services Digital Network – цифровая сеть с интеграцией услуг),
есть базовый интерфейс, обеспечивающий скорость 192 кбит/с при передаче 48-битовых кадров. Пусть используется технология TDD и размер блока равен длине кадра. Предположим, что расстояние между абонентом и коммутатором сети равно 1 км, а защитный интервал равен 10 мкс. Какова реальная скорость передачи данных?
18

Время передачи пакета
48бит192кбит / с 250мкс.
Задержка распространения
1км3108м / с 3,33мкс.
Таким образом, получаем
|
|
3,33 10 |
|
|
A 2 192 1 |
|
|
|
404,5кбит / с . |
|
||||
|
|
250 |
|
|
Беспроводная схема TDD, как правило, используется в сочетании с технологией TDMA, в которой несколько абонентов могут по очереди принимать сигналы в прямом канале (от базовой станции к трубке) и затем передавать сигналы в обратном канале (от трубки к базовой станции) по очереди, используя при этом одну и ту же несущую частоту [3].
Использование дуплекса с временным разделением имеет два важных преимущества перед использованием системы TDMA с двумя разными несущими частотами, по одной на каждое направление. Первым преимуществом является возможность устранения быстрого замирания, а вторым – улучшенное распределение пропускной способности.
Что касается быстрого замирания, то его эффект меняется с изменением частоты. Поэтому связь с мобильным пользователем, принимающим на одной частоте, а передающим на другой, может ухудшаться только в одном направлении. Одним из способов преодоления быстрого замирания является пространственное разнесение антенн. В такой схеме приемник использует две антенны, расстояние между которыми не меньше длины волны. При такой конфигурации довольно велика вероятность того, что при сильном замирании сигнала от одной из антенн, сигнал от другой антенны будет распространяться нормально. В этом случае приемник сможет выбрать для демодуляции более сильный из поступающих сигналов. Такой метод подходит для крупной базовой станции, однако, непрактичен для маленьких, недорогих. Более того, желательно избегать использования сложных алгоритмов выравнивания или прямой защиты от ошибок. Впрочем, в схеме TDD все же можно использовать пространственное разнесение антенн. Для приема каждого пакета, прибывающего на базовую станцию по прямому каналу связи, базовая станция выбирает ту антенну, сигнал которой сильнее. Затем базовая станция использует ту же антенну для последующей передачи в соответствующем прямом канале. Ввиду того что для обоих направлений используется одна и та же частота, эта антенна должна давать самый сильный сигнал и в обратном направлении, к трубке.
Второе преимущество схемы TDD – TDMA перед схемой FDMA – TDMA проявляется в механизме распределения пропускной способности. Для многих приложений, ориентированных на работу с данными (в отличие от приложений,
19

предназначенных для работы с речью), наибольший объем нагрузки приходится, как правило, на прямое направление, а не на обратное. При использовании обычной схемы FDMA с предоставлением прямому и обратному каналам полос частот одинаковой ширины, системы проектируются с учетом нагрузки в прямом канале, так что большая часть полосы обратного канала обычно не используется. Если же использовать схему TDD, то контроллер системы динамически распределяет слоты TDMA в каждом направлении, так что при необходимости прямому каналу может предоставляться большее число слотов.
Формат кадра DECT
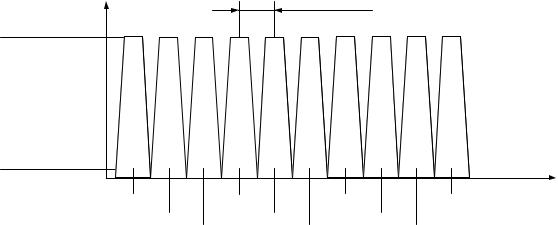
Информация передается на каждой частоте со скоростью 1152 кбит/с. На каждой несущей организуются временные циклы по 24 слота в каждом, повторяющиеся каждые 10 мс (рисунок 2.9).
Рисунок 2.9 – Организация радиоинтерфейса
Длительность полного цикла составляет 11520 бит. Временные слоты используются либо для передачи, либо для приема. В базовой версии временной кадр в 10 мс разделяется на две половины по 12 слотов в каждой: в первые 12 слотов базовая станция передает данные для портативного устройства, вторые 12 слотов используются для передачи информации базовой станции. Слоты передачи и приема отстоят друг от друга на 12 слотов. Таким образом, каждому устройству в любой момент времени доступны 120 дуплексных частотновременных каналов.
20