

neuro_lab6
.pdfОтчет по лабораторной работе № 6
по дисциплине «Нейрокомпьютеры и их применение»
на тему «Сравнительное исследование нейросетевого оптимального и ПИД регуляторов»
Цель работы
Исследовать свойства нейросетевого оптимального регулятора в сравнении с линейным регулятором типа ПИ. Сравнить регуляторы в различных условиях на основе интегрального (среднеквадратическая ошибка) и экстремального (максимальная ошибка) критериев.
Выполнение
1. Номинальная стохастическая уставка и помеха, номинальный объект управления.
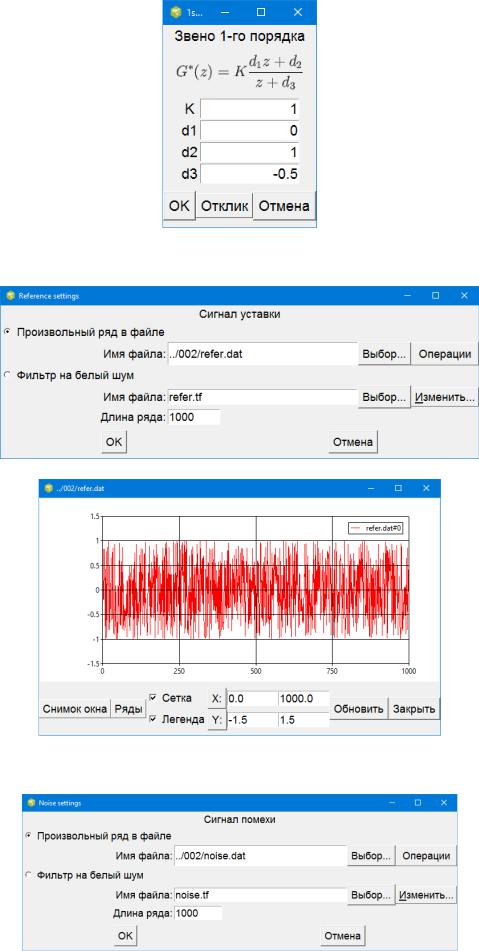
Объект управления:
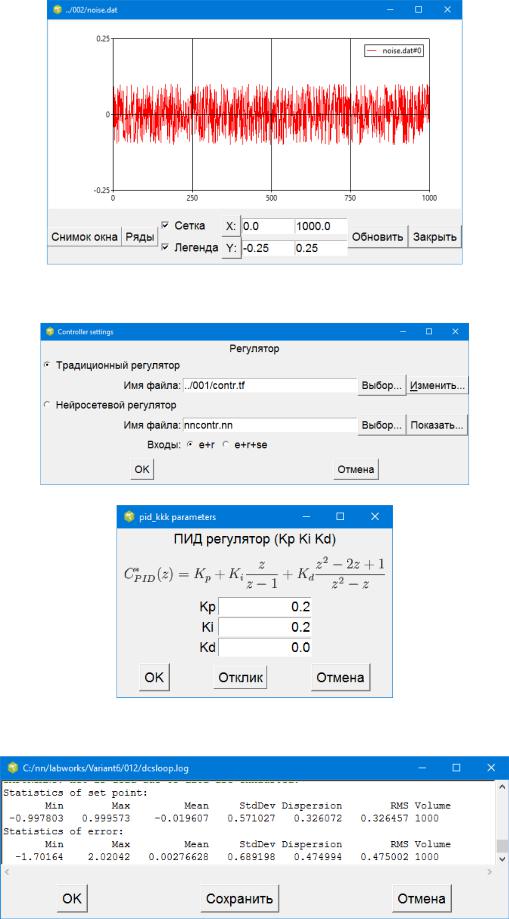
Сигнал уставки:
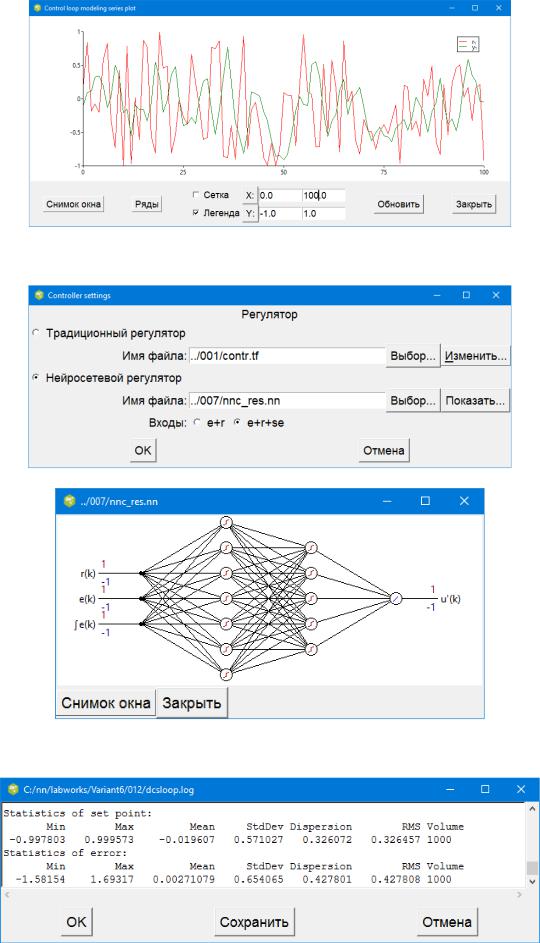
Сигнал помехи:
2
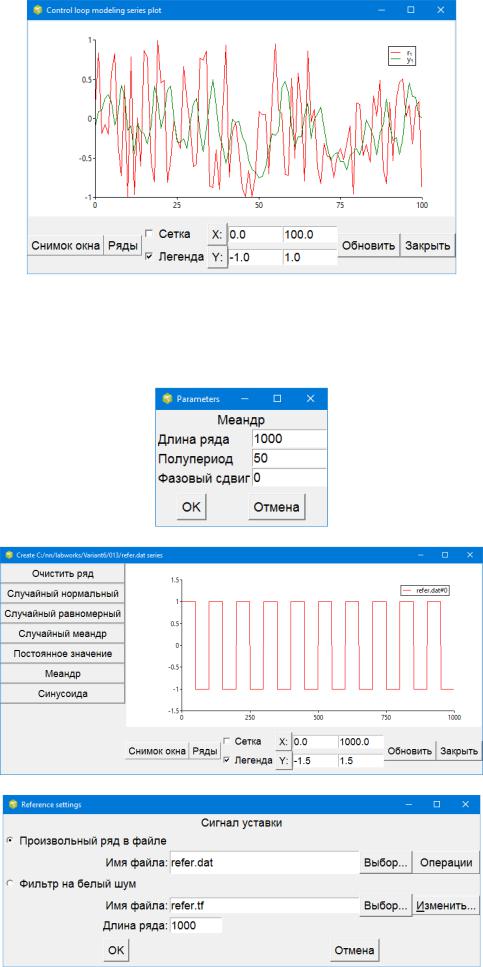
ПИ-регулятор:
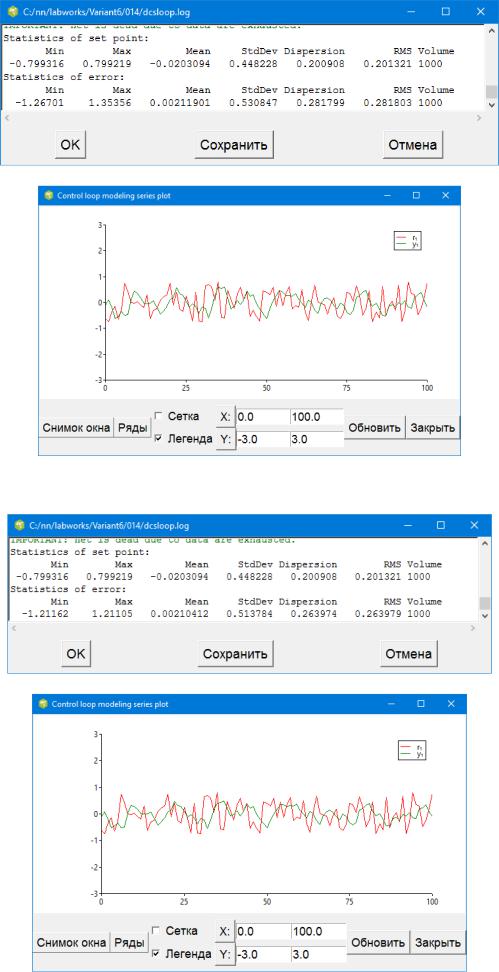
Результаты эксперимента с ПИ-регулятором:
3
Нейросетевой оптимальный регулятор из лабораторной работы № 5:
Результаты эксперимента с НОР:
4
2. Уставка — меандр с амплитудой 1 и длительностью ступеней 50. Помеха отсутствует. Объект управления — номинальный.
Сигнал уставки:
5
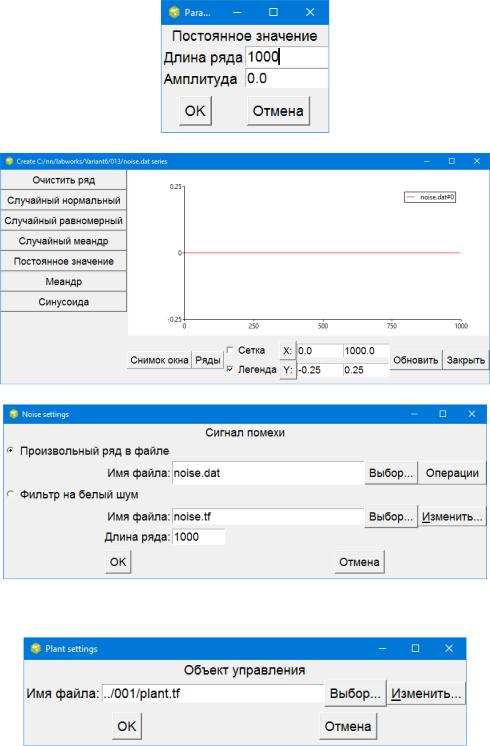
Сигнал помехи:
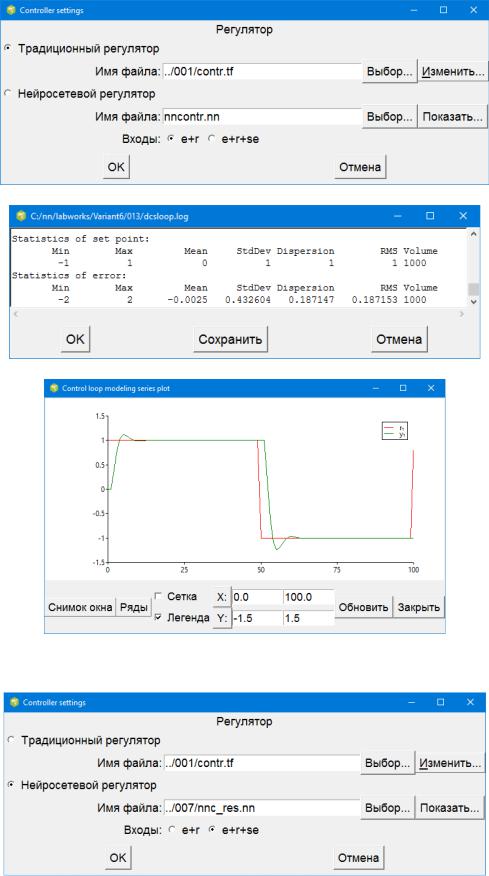
Результаты эксперимента с ПИ-регулятором:
6
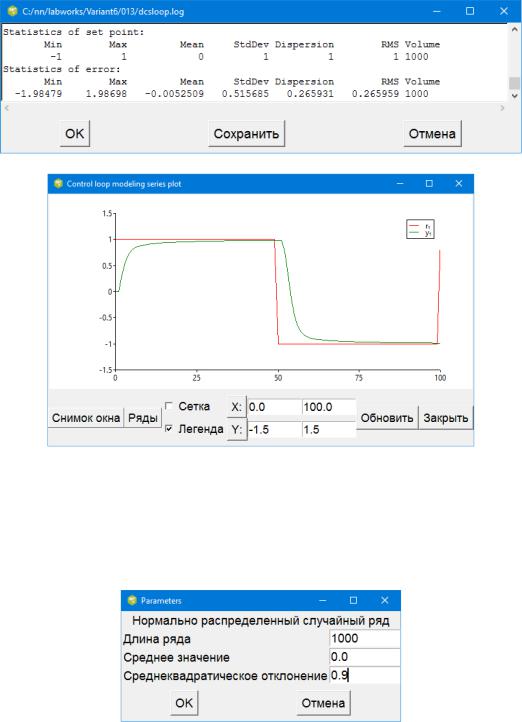
Результаты эксперимента с НОР:
7
3.Стохастическая уставка, отличная от номинальной, с дисперсией, примерно совпадающей с номинальной. Номинальная помеха. Объект управления —
номинальный.
Сигнал уставки:
8
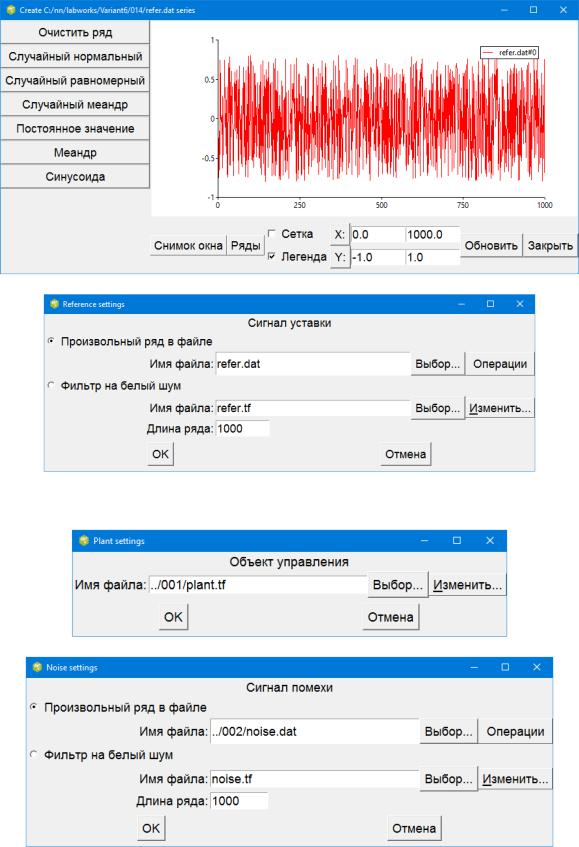
Другие элементы схемы:
Результаты эксперимента с ПИ-регулятором:
9
Результаты эксперимента с НОР:
10