

Конспект лекцій для самостійного опрацювання (розділ 1)
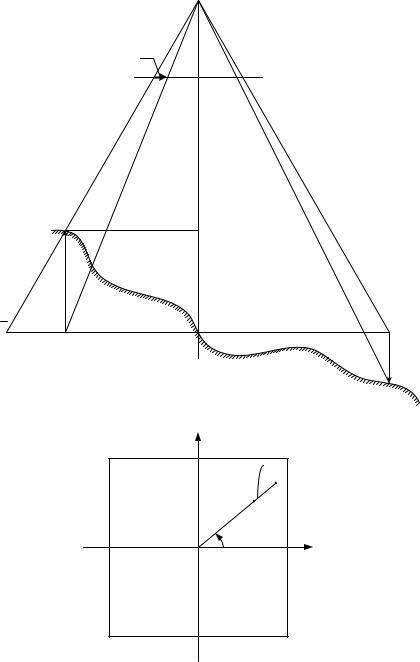
.pdfдва знімки: горизонтальний P0 і нахилений P отримані з одного центра проекції S аерофотоапаратом фокусна віддаль якого f .
p0
p
S
0
2
αo
f
mº 0º
n
m
M
f
O
C
 C
C
 O
O
Рис. 3.5. Геометрична інтерпретація перетворення нахиленого знімка до горизонтального
Точка місцевості M зобразилась в точці m на нахиленому знімку, а на горизонтальному – в точці m0 . Нехай координати точки m будуть x , y , а точки m0 – x0 , y 0 . Оскільки на місцевості маємо одну й ту саму точку M , то прирівнявши її координати, отримані за формулами (3.34) для горизонтального знімка і за формулами (3.26) для нахиленого знімка отримаємо:
|
(1) |
X − X |
|
= |
H |
x0 , Y − Y = |
H |
y 0 |
– для горизонтального знімка |
|
|
|
||||||||||||||||
|
|
|
|
S |
|
f |
|
|
|
S |
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
(2) |
X − X |
|
= −H |
a1 x + a2 y − a3 f |
|
, Y −Y |
= −H |
b1 x + b2 y − b3 f |
|
– для похилого знімка |
|
||||||||||||||||
|
|
|
|
S |
|
|
|
|
|
c1 x + c2 y − c3 f |
|
|
S |
|
|
|
c1 x + c2 y − c3 f |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
Прирівнявши |
праві частини |
(1) |
і |
(2) отримаємо |
|
H |
x0 |
= −H |
a1 x + a2 y − a3 f |
, |
|||||||||||||||||
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
f |
|
c1 x + c2 y − c3 f |
|
|
H |
y 0 = −H |
b1 x + b2 y − b3 f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
f |
c1 x + c2 y − c3 f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Звідси: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
x0 |
= − f |
|
|
a1 x + a2 y − a3 f |
|
, |
y 0 = − f |
|
b1 x + b2 y − b3 f |
|
|
|
|
(3.48) |
|
||||||||||
|
|
|
|
|
c1 x + c2 y − c3 f |
|
|
c1 x + c2 y − c3 f |
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
Якщо координати головної точки знімка "o" не дорівнюють нулю, то формули (3.48) матимуть вигляд:
x0 = − f |
a1 |
(x − x0 )+ a2 |
(y − y0 )− a3 f |
, |
y 0 = − f |
b1 |
(x − x0 )+ b2 |
(y − y0 )− b3 |
f |
(3.49) |
|
c1 |
(x − x0 )+ c2 |
(y − y0 )− c3 f |
c1 |
(x − x0 )+ c2 |
(y − y0 )− c3 f |
||||||
|
|
|
|
||||||||
Поступивши за аналогією можна отримати формули оберненої залежності, які при x0 = y0 = 0 матимуть вигляд:
|
a x0 |
+ b y 0 |
− c f |
, |
|
a |
2 |
x0 |
+ b y 0 |
− c |
2 |
f |
|
||||
x = − f |
|
1 |
|
1 |
1 |
|
y = − f |
|
|
2 |
|
|
(3.50) |
||||
a |
3 |
x0 |
+ b y 0 |
− c |
3 |
f |
a |
3 |
x0 |
+ b y 0 |
− c |
3 |
f |
||||
|
|
|
3 |
|
|
|
|
|
|
3 |
|
|
|
||||
Формули (3.48) або (3.49) називаються формулами трансформування знімків. З огляду на рис.3.5 точка надиру похилого знімка належить до одного
проектуючого променя, що і головна точка горизонтального знімка, тому для визначення її координат на похилому знімку достатньо в формули (3.50) підставити
x"0n" = y"0n" = 0 :
x"n" = − f |
c1 |
, |
y"n" = − f |
c2 |
(3.51) |
|
c3 |
c3 |
|||||
|
|
|
|
Виконавши не складні перетворення можна отримати формули для обчислення на похилому знімку координати точки нульових спотворень:
x"c" |
= − f |
|
c1 |
, y"c" |
= − f |
c2 |
(3.52) |
|
+ c3 |
1 + c3 |
|||||
|
1 |
|
|
|
|||
Формули (3.48) і (3.49) є строгими і використовуються для довільних значень кутових елементів зовнішнього орієнтування похилого знімка.
Для планових знімків ці формули можна значно спростити. Для цього підставимо в них матрицю напрямних косинусів (3.11) або (3.12) і після нескладних перетворень (розклавши в ряд і обмежившись величинами першого і другого порядку) дістанемо:
x0 |
|
|
|
x2 |
|
xy |
|
|
|
|||||
= x + |
f |
+ |
|
|
+ |
|
|
|
− y +... |
|
||||
|
|
|
|
|
|
|||||||||
|
|
|
|
f |
|
|
|
f |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
(3.53) |
|||||
|
|
|
|
|
|
|
y2 |
|
|
|||||
y0 |
|
|
xy |
|
|
|
|
|||||||
= y + |
|
|
+ |
f + |
|
|
|
+ x +... |
|
|||||
|
|
|
|
|
|
|||||||||
|
|
|
f |
|
|
|
|
f |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Дані формули не є строгими, але їх перевага в тому, що вони лінійні відносно елементів зовнішнього орієнтування , , і в більшості випадків використовуються при попередній оцінці точності трансформування.
Продиференціювавши формули (3.53) за елементами , , отримаємо:
dx0 |
|
|
|
x2 |
|
|
|
|
xy |
|
|
|
|
= dx + |
f |
+ |
|
d + |
|
|
|
d − yd + ... |
|
|
|||
|
|
|
|
|
|||||||||
|
|
|
|
f |
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.54) |
||
|
|
xy |
|
|
|
|
|
y 2 |
|
|
|||
|
|
|
|
|
|
|
|
||||||
dy 0 |
= dy + |
|
d + f |
+ |
|
|
|
d + xd + ... |
|
||||
|
|
|
|
|
|||||||||
|
|
f |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Дані формули можна використати для визначення похибки dx або dy при відомих значеннях похибок d , d , d .
Приклад: ЕЗО відомий з похибкою d = 2'. З якою похибкою буде визначено dx ? при f = 70 мм, x = y = 70 мм dx = 0.08 мм.
При f =140 мм, dx = 0.1мм.
Отже при збільшені значення фокусної віддалі похибка визначення координат збільшується.
Перейдемо до середньоквадратичних похибок. Для цього в формулі (3.54) замінивши диференціали на m2 маємо:
mx20
my20
=mx2вим
=my2вим
|
|
|
|
x 2 |
2 |
|
2 |
xy |
2 |
|
2 |
|
2 |
|
2 |
||||||
+ f |
|
+ |
|
|
|
|
m |
|
+ |
|
|
m |
|
|
+ y |
|
m |
|
|||
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
f |
|
|
|
|
|
f |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
xy |
2 |
|
2 |
|
|
|
y 2 |
|
2 |
|
|
2 |
|
2 |
|
2 |
|||||
+ |
|
|
|
|
m |
|
+ f + |
|
|
|
m |
|
+ x |
|
m |
|
|||||
|
|
|
|
|
|
|
|
||||||||||||||
|
f |
|
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
+ ...
(3.55)
+ ...
Формули (3.55) використовують для визначення середньої квадратичної похибки трансформованих координат при відомих середньоквадратичних похибках вимірювань mxвим і m yвим і кутових ЕЗО m , m , m . Коли ці значення невідомі, то використавши принцип рівного впливу отримаємо:
|
|
|
|
m |
20 |
= m2 |
|
|
m20 |
|
|
|
|
|
x 2 |
|
2 |
|
|
m20 |
|
xy 2 |
|
|
|
|
m20 |
= y 2 m2 |
|
||||||||||||
|
|
|
|
x |
, |
|
x |
|
= f + |
|
|
|
|
m2 |
, |
|
x |
|
|
= |
|
|
|
|
|
m2 |
, |
|
x |
, |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
4 |
|
|
xвим |
|
4 |
|
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
f |
|
|
|
|
|
|
|
|||||||||||
або |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m |
0 |
|
|
|
|
|
|
m |
0 |
|
|
|
|
x 2 |
|
|
|
|
|
m |
0 |
xy |
|
|
|
|
|
|
m |
x |
0 |
|
|
|
|
|
|
|||
|
x |
|
= m |
|
|
, |
|
x |
|
= f |
+ |
|
m |
|
, |
|
x |
|
= |
|
|
m |
, |
|
|
|
|
= ym |
|
|
(3.56) |
||||||||||
|
|
|
xвим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
2 |
|
|
|
|
2 |
|
|
|
|
|
f |
|
|
|
|
2 |
|
|
|
f |
|
|
2 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Згідно формул (3.55) точність вимірювань на знімку повинна бути в два рази більша ніж точність трансформування.
Визначимо необхідну точність кутових ЕЗО, щоб їх точність не впливала на точність трансформування. З формул (3.56) маємо:
m = |
mx0 |
|
|
|
; |
m = |
mx0 f |
; |
m |
|
= |
mx0 |
|
|
|
|
x |
2 |
|
|
|
2xy |
|
|
|
|
2 y |
(3.57) |
|
|
|
|
|
|
|
|
||||||||
|
2 f + |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
f |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|||
За даними формулами можна обчислити необхідну точність визначення кутових ЕЗО, щоб точність трансформованих координат не перевищувала наперед заданої величини.
Приклад: mx0 , y0 = 0.1мм, x = y = 70 мм, f = 70 мм.
m 1'.24 , m 2'.46 , m 2'.46 .
Якщо прийняти mx0 , y0 = 0.4 мм, т.б. точність топоплану отримаємо m , , 12' .
Таким чином кутові ЕЗО необхідно знати з високою точністю.

Тема 4. Масштабні та лінійні спотворення на аерофотознімку
Тематичний план
4.1. Лінійні зміщення на аерознімку, спричинені його нахилом.
4.2. Лінійні зміщення на аерофотознімка, спричинені рельєфом місцевості. 4.3. Масштаби зображень на нахиленому аерознімку.
4.1. Лінійні зміщення на аерознімку, спричинені його нахилом
Розглянемо характер зміщення точок аерофотознімка, яке спричинене його нахилом. З теорії центрального проектування відомо, що це зміщення відбувається за радіусом-вектором в напрямі точки нульових спотворень "c" . Точка на похилому знімку віддаляється або наближається до точки "c" залежно від того, як вона розміщена відносно лінії не спотворених масштабів, тобто горизонталі, що проходить через точку "c" . Відомо, що на цій лінії масштаб горизонтального знімка і похилого , а також координати похилого і горизонтального знімка є однаковими. Такі знімки перетинаються по лінії hc hc .
Представимо це графічно. Нехай нахилений (P) і горизонтальний (P 0 ) знімки отримані одним аерофотоапаратом з одного центра проекції S (рис.4.1).
|
н |
|
|
|
на т. І |
|
|
|
|
|
|
|
S |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
а |
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||
|
|
|
т. |
І |
|
|
|
p |
|
|
|
|
|
|
|
|
|
α0 |
|||||
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hc |
|||
|
|
|
|
|
|
|
|
|
|
|
m |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0º |
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m0 |
|
0 |
|
|
|
n |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
p0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
c |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
a |
|
|
|
|
|
|
|
|
|
|
|
|
hi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ро |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
р |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
E’ |
|
|
|
I |
|
y |
|
|
|
|
|
|
|
|
|
|
|
φ |
|
|
|
c,S |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
х |
m |
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
δα |
|
|
|
|
|
x |
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
hi |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
б |
|
|
|
|
|
|
|
hc |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Рис.4.1. Лінійні зміщення спричинені нахилом знімка на просторовому (а) і на плоскому (б) рисунках.

Для знаходження зміщення точки в аналітичному вигляді, використаємо |
||||||||||||||
формули зв’язку координат (2.44) для нахиленого знімка з початком координатної |
||||||||||||||
системи на знімку в точці "c" , а на місцевості у відповідній їй точці "C" та |
||||||||||||||
формули (2.36) для визначення координат за горизонтальним знімком. Оскільки |
||||||||||||||
на обох знімках |
відобразилась |
одна й та ж сама |
точка |
місцевості |
M |
то |
||||||||
координати X і Y |
цієї точки, |
виражені через координати x , y |
похиленого знімка |
|||||||||||
та координати x0 , |
y 0 |
горизонтального знімка можна прирівняти: |
|
|
|
|||||||||
|
|
|
|
X = H x0 |
= H |
x |
; |
|
|
|
|
|
||
|
|
|
|
|
|
f |
f |
− y sin 0 |
|
|
|
|
|
|
|
|
Y = H y 0 |
= H |
y |
|
|
|
|
(4.1) |
|
||||
|
|
|
f |
|
|
f |
− y sin 0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Звідси: |
|
|
|
|
|
|
|
|
x0 |
= f |
x |
|
; y 0 |
= f |
y |
|
|
|
(4.2) |
|
||
|
|
|
|
|
|
|
|
|
||||||
|
|
f |
− y sin 0 |
|
f |
− y sin 0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
Оскільки зображення горизонтального знімка P0 |
відповідає ортогональній |
|||||||||||||
проекції, то його можна розглядати як предметну площину |
E' . А горизонталь |
|||||||||||||
неспотворених масштабів hc hc – |
як |
вісь перспективи |
t't' . На підставі цього з |
|||||||||||
просторового рис.4.1а перейдемо до рис. 4.1б, що представляє собою суміщення |
||||||||||||||
горизонтального та похилого знімка відносно вісі |
hc hc . |
В такому випадку точка |
||||||||||||
нульових спотворень "c" буде одночасно і точкою основи картинної площини, а |
||||||||||||||
точки m і m0 будуть лежати в одному проектуючому промені cmm0 . |
|
|
|
|||||||||||
|
V y |
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
xo |
|
mo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
M |
|
|
|
|
|
|
|
δ |
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m. |
|
yo |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
|
|
|
|
|
hc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с |
φ |
|
|
|
hc |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
x |
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Y |
|
|
|
|
|
|
|
|
|
|
|
|
φo |
|
|
|
|
|
|
|
V |
|
|
|
|
C |
|
X |
|
|
|
X |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
а |
|
|
|
|
|
|
|
б |
|
|
|
|
Рис.4.2. Зв'язок прямокутних та полярних координат точок знімка (а) і |
||||||||||||||
|
|
|
|
|
місцевості (б). |
|
|
|
|
|
|
|||
Далі встановимо зв'язок |
|
між |
прямокутними |
координатами |
(x, y) |
та |
||||||||
полярними (r, ) (рис.4.2). |
|
|
|
|
|
|
|
|
|
|
|
|
||

|
|
r 2 |
= x 2 + y 2 |
|
|
|
|
|
|
|||
|
|
r 0 2 |
|
= x 0 2 + y 0 2 |
|
|
(4.3) |
|||||
|
|
y = r sin |
|
|
|
|
|
|
||||
Шукане зміщення |
|
згідно рис. |
4.2а представляє собою різницю радіус- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
векторів r і r 0 відповідно похилого і горизонтального знімків. |
|
|
||||||||||
|
|
|
= r − r 0 |
|
|
|
|
(4.4) |
||||
Підставляючи у формули |
(4.2) замість x0 , y 0 радіус |
вектор |
r 0 із |
|||||||||
залежностей (4.3) для горизонтального знімку маємо: |
|
|
||||||||||
|
|
r 0 = |
|
|
f |
|
r |
|
|
(4.5) |
||
|
|
|
|
|
|
|
|
|||||
|
|
|
f |
− y sin |
0 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|||
Далі замінивши у знаменнику цього виразу y на r sin , а r 0 |
на r − |
після |
||||||||||
деяких нескладних перетворень отримаємо шукане зміщення |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= − |
|
|
r |
2 sin sin |
0 |
|
(4.6) |
||||
|
|
|
|
|
|
|
||||||
|
f − r sin sin 0 |
|||||||||||
|
|
|
|
|
|
|||||||
Формулу (4.6) можна спростити, опустивши в знаменнику другий доданок, що повністю виправдано для планових знімків ( 0 30 ); беручи до уваги що
sin 0 0 , маємо:
= − |
r 2 ' |
0 |
sin |
(4.7) |
f ' |
|
|||
|
|
|
|
|
В цих формулах – кут між головною горизонталлю і радіус-вектором r |
||||
проведеного з точки нульових спотворень "c" на задану точку m , проти ходу годинникової стрілки.
|
|
|
Розглянемо приклад: 0 = 10 ; |
f = r =100 мм, |
= 0 або |
180 знаходимо, що |
||||||||
|
|
|
= 0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Легко замітити, що максимальне спотворення |
мають |
точки, які |
|||||||||
розміщені на головній вертикалі: = 900 або 2700 , |
|
|
||||||||||||
sin = 1, |
|
= 1.75 мм |
||||||||||||
|
|
|
Отже навіть для планового знімка зміщення за кут нахилу досягає значної |
|||||||||||
величини. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
За формулою (4.7) |
прийнявши, що sin = 1 можна обчислити радіус rк.п. |
||||||||||
корисної площі знімка, в межах якої максимальне спотворення |
не перевищить |
|||||||||||||
заданого значення . Замінивши в (4.7) r на rк.п. |
і на отримаємо: |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
rк.п. = |
f ' |
|
|
|
|
|
(4.8) |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
'0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
При = 0.1мм, |
0 = 30' і |
f = 70 мм, rк.п. = 28.3 мм, |
а |
при |
f =140 мм, |
||||||
rк.п. = 40.1 мм. |
|
|
|
|
|
|
|
|
|
|
|
|||
Аналіз отриманих формул дозволяє зробити декілька важливих висновків:

1.Наявність кута нахилу спричинює лінійні зміщення контурних точок на знімку за напрямом проведення з точки нульових спотворень на задану точку.
|
|
|
|
2. Величина спотворення |
|
збільшується по мірі |
збільшення кута нахилу 0 |
і зменшенням фокусної віддалі аерофотокамери |
f . Величина спотворення |
||
при постійних значеннях 0 і f залежить від положення контурної точки на знімку, т.б. від величини кута і радіус-вектора r .
3.Корисна площа планового знімка близька до його робочої площі при використанні середньо фокусних і довгофокусних аерофотоапаратів.
4. Точки, які лежать на лінії неспотворених масштабів |
h h |
= 00 ,180 0 не |
|
c c |
|
зміщуються за наявність кута нахилу ( = 0). Натомість точки, що лежать на головній вертикалі vv ( = 900 ,2700 ) зміщуються максимально ( = max ).
5.Довжина відрізка, симетричного відносно точки нульових спотворень, не спотворюються: кути для кінців відрізка відрізняються на 1800 , а їх
спотворення рівні за величиною і протилежні за знаком.
Властивості точки нульових спотворень "c" і лінії неспотворених масштабів hc hc покладено в основу конструктивних особливостей багатьох фотограмметричних приладів (для прикладу корекційних механізмів універсального стереоприладу проф. Романовського Г.В.). Зміщення точок, що викликані кутом нахилу знімка, повністю усувається в результаті його трансформування.
Спосіб отримання зміщення наведено вище не є єдиним. Для отримання значення шуканого зміщення можна, для прикладу, використати зв'язок між плоскими прямокутними і полярними координатами точок місцевості, враховуючи наведену вище властивість точки нульових спотворень, а саме: горизонтальні кути, вершиною яких є точка "c" знімка і відповідні їм кути з вершиною в точці "C" місцевості не спотворюються ( = 0 ). З огляду на рис.4.2б
R = |
Y |
(4.9) |
|
sin |
|||
|
|
Ординату Y згідно до формули (2.44) для похилого знімку у випадку початку координат в точці "c" , а на місцевості у відповідній їй точці "C" представимо у вигляді:
Y = |
Hy |
|
|
(4.10) |
||
|
|
|
||||
f − y sin |
0 |
|||||
|
|
|
||||
Підставивши значення (4.10) в (4.9) з врахуванням останньої рівності (4.3) |
||||||
маємо: |
|
|
|
|
||
R = |
|
Hr |
|
|
(4.11) |
|
|
|
|
|
|||
f |
− r sin 0 |
sin |
||||
|
|
|||||
Радіус-вектор R0 на місцевості за горизонтальним знімком має вигляд:

|
|
|
R0 = |
Hr 0 |
|
(4.12) |
|
|
|
f |
|||
|
|
|
|
|
||
Враховуючи рівність лівих частин розділимо (4.11) на (4.12) і замінивши в |
||||||
чисельнику (4.12) |
r 0 |
на (r − ), що випливає із (4.4), після |
нескладних |
|||
перетворень знайдемо шукане зміщення |
|
|||||
|
= − |
r 2 sin sin |
, що рівноцінне формулі (4.6). |
|
||
0 |
|
|
||||
|
|
|
|
|
|
|
f − r sin 0 sin
4.2. Лінійні зміщення на аерофотознімка, спричинені рельєфом місцевості
Вище було встановлено, що аерофотознімок представляє собою фотозображення місцевості в центральній проекції, а топографічний план – в ортогональній: ці проекції співпадають тільки у випадку, якщо знімок
горизонтальний, а місцевість рівнинна. |
На |
рис.4.3 даній |
умові |
відповідає |
|||||||
|
|
|
із зображеннями M 0 і K 0 . |
|
|
|
|
|
|||
положення знімка P0 |
|
|
|
|
|
||||||
Наявність рельєфу місцевості (перевищення h ), обумовлює зміщення |
|||||||||||
точки на аерофотознімку. На рис. |
показаний горизонтальний знімок |
P0 |
|||||||||
горбистої місцевості, отриманий з висоти фотографування H над площиною |
E . |
||||||||||
Точки місцевості M |
і |
K |
мають перевищення |
над площиною |
E |
+ hM і − hK |
|||||
відобразились на знімку |
P0 |
точками m і k |
на відстані r = nm |
і r |
= nk від точки |
||||||
|
|
|
|
|
|
|
m |
k |
|
|
|
надиру n . З рисунку видно, що точка надиру n під впливом рельєфу місцевості не зміщується, бо лежить на прямовисному промені SN . Тому для розв’язання задач з дослідження впливу рельєфу місцевості на зміщення точок вибирають координатні системи з початком в точці "n" на знімку і точці N на місцевості.
|
|
|
|
|
S |
|
|
|
|
|
|
δh |
|
f |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p0 m |
mo |
n |
k |
ko |
|
|
|
|
|
|
0o |
|
|
|
|
|
|
|
|
SN=H |
|
|
|
|
|
|
|
|
SN=H-h |
|
|
|
|
|
M |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
N' |
|
|
|
|
|
|
|
|
|
+h |
|
|
|
|
|
+h |
|
|
|
|
|
|
E |
|
|
R |
|
N |
|
|
Ko |
|
M |
Mo |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
-h |
|
|
|
|
|
|
|
|
K |
|
|
|
|
|
а |
|
|
|
|
|
|
|
|
V y |
|
|
|
|
|
|
|
|
|
|
|
δh |
|
|
|
|
|
|
|
|
m |
|
|
|
|
|
|
m0 |
|
r |
|
|
|
|
|
|
r |
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
hn |
|
|
φ |
|
hn |
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
V |
|
|
|
|
|
|
|
|
б |
|
|
|
Рис.4.3. Зміщення точок на знімку через рельєф місцевості.
Точка M 0 |
і K0 |
є ортогональними проекціями точок |
M і K місцевості на |
||
|
|
|
|
||
|
|
|
|
P0 зобразились би в |
|
предметну площину |
E , а їх проекції на площину знімка |
||||
точках m0 і k0 . |
При |
наявності рельєфу місцевості, що на рисунку відповідає |
|||
відрізкам M 0 M = +h і K0 K = −h , проекції точок M і K зобразились в точках m і k
на знімку. Отже відрізки m0 m і k0 k |
відповідають зміщенням (спотворенням) h |
точок m і k , спричинені рельєфом місцевості. |
|
h = r − r0 |
|
r = nm |
(4.13) |
r0 = nm0
Такі зміщення проходять в напрямі точки надиру, за радіус-вектором на задану точку знімку, віддаляючись або наближаючись до неї. Точка знімка
наближається до точки надиру, якщо її перевищення над площиною |
|
E |
|
додатнє |
||||
(h 0), і віддаляється |
від неї, |
якщо від’ємне (h 0). Зображення |
точок, що |
|||||
|
|
|
|
|||||
належать до площини |
E (h = 0), |
і точка надиру не мають зміщень, спричинені |
||||||
рельєфом. |
|
|
|
|
|
|
|
|
В аналітичному |
вигляді |
зміщення точки на знімку h |
можна |
знайти |
||||
розглядаючи дві пари подібних трикутників Snm ~ M 0 M ' M і Smm0 |
~ SM ' M 0 |
із яких |
||||||
випливає:
h = |
h |
r |
(4.14) |
|
|
||||
H − h |
||||
|
|
|
При h =100м, r =100 мм і H = 2000 м зміщення точки на знімку, викликане рельєфом місцевості буде 5мм, що значно більше зміщення, що обумовлено впливом кута нахилу.
В рівнинній і горбистій місцевості (при кутах нахилу поверхні менше 2 ) перевищення h є відносно малими величинами в порівнянні з висотою фотографування H, тому для практичних цілей можна використовувати таку формулу
h |
= |
r h |
= |
r h |
|
|
H |
f m |
(4.15) |
||||
|
|
|
Формули (4.14) і (4.15) отримані без врахування кута нахилу знімка і тому не є строгими. В той же час вони широко використовуються в фотограмметричній практиці, так як допустима похибка обчислення величини зміщення h при плановому аерозніманні не перевищує 0,1-0,2 мм, що в повній мірі відповідає
інструкції з фотограмметричних робіт |
( h 0.3 0.4 мм в масштабі плану). |
Використовуючи формулу (4.15) |
можна знайти допустиме перевищення |
hдоп. , при якому величина зміщення h не буде перевищувати наперед заданої величини. Враховуючи, що існують як додатні так і від’ємні перевищення, можна допустити про існування деякої зони Q в межах якої зміщення будуть допустимі. З врахуванням коефіцієнта збільшення формулу (4.15) можна представити:
'h = |
rh |
(4.16) |
|
fM |
|||
|
|
де M – масштаб топоплану (фотоплану).
Прирівнявши формули (4.15) і (4.16) приходимо до висновку, що зміщення за рельєф на топоплані відрізняється від зміщення на аерознімку в n раз:
'h = n h , |
n = |
mзн. |
(4.17) |
|
M |
||||
|
|
|
Для знаходження висоти зони Q перетворимо формулу (4.16), враховуючи коефіцієнт збільшення і подвоїмо отриманий результат: