


|
|
|
1 |
|
|
|
|
m2 |
|
|
|
|
|
m2 |
= |
|
|
m2 |
+ |
|
в |
|
. |
|
(14) |
||
|
|
|
|||||||||||
|
β |
|
|
|
|
н |
|
2Р |
|
|
|
|
|
Або: |
|
|
P |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1 |
|
|
|
m2 |
|
|
|||
m |
β |
= |
|
|
|
m2 |
+ |
|
в |
. |
(15) |
||
|
|
|
|
||||||||||
|
|
|
|
|
|
н |
|
|
|
|
|
||
|
|
|
|
P |
|
|
2Р |
|
|||||
Порівнюючи формули (7) та (15)зауважимо,що коли n = P (число прийомів дорівнює
числу повторень), похибка відліку під час вимірювання методом повторень в P разів менша за похибку відліку, ніж під час вимірювання способом кругових прийомів. Саме через це спосіб повторень був основним способом вимірювання кутів, коли не було високоточних відлікових пристроїв. У наш час спосіб втратив свою колишню популярність.
2.12. Способи зменшення похибок центрування і редукції. Триштативна система.
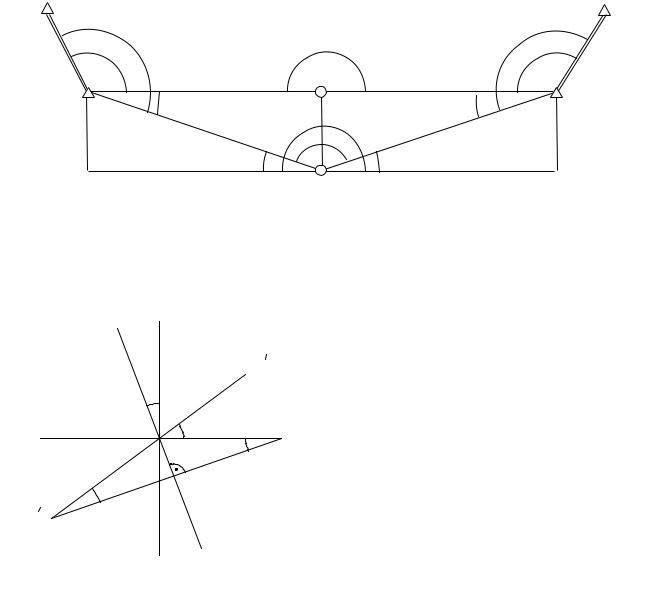
Для зменшення похибок вимірювання кутів у поліґонометричних ходах, зазвичай, застосовують триштативну систему (рис. 2.12). Триштативна система вимірювання кутів дозволяєзначно зменшитивеличинунев’язки ходучерез похибки центрування та редукціїнад визначуваними пунктами, якщо вимірювання всіх кутів виконано без перерви уроботі. Це значить, що не можна виміряти частину кутів, зняти штативи, а потім продовжувати вимірювання. Всі штативи можна зняти по завершенні вимірювання всіх кутів у ході.
|
|
|
β1 |
β2 |
β3 |
||||||
п.п.1 |
п.п.2 |
п.п.3 |
п.п.4 |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2.12. Фраґмент триштативної системи
Послідовність виконання робіт під час застосування триштативної системи така. Теодоліт (електронний тахеометр (ЕТ)) і марки встановлюють на підставки. Підставки прикріплюють до штативів. Розсувні частини ніжок штатива витягують майже на повну довжину, залишаючи запас 5-7 см. Навідні ґвинти підставки та теодоліта (ЕТ) установлюють у середнє положення.Над вихідними пунктами (п.п.1, п.п.2) упочатку ходу, і так само укінці ходу, прилади центрують з точністю1мм. Надвизначуваними пунктами точність центрування може бути дещо меншою –3-5мм.Одинзнапрямів,зазвичай,заднійдляпрокладуваногоходу, вибирають за початковий. Як візирні цілі застосовують спеціальні візирні марки, якщо кути вимірюють теодолітами.Якщо кути вимірюють електронними тахеометрами (ЕТ), то марки з відбивачами. Зазвичай, вимірюють ліві за ходом кути.
•Якщо вимірюють кут на п.п.2, то теодоліт (ЕТ) установлюють над цим пунктом, а на задньому вихідному (пункт п.п.1) та передньому визначуваному (пункт п.п.3) – встановлюють візирні марки чи візирні марки із відбивачами.
•По завершенні вимірювань, не рухаючи штативи з підставками на пунктах п.п.2 та п.п.3, змінюємо місцями теодоліт (ЕТ) та марку, а з пункту п.п.1 знімаємо штатив з маркою та центруємо його над пунктом п.п.4.
•Виконуємо вимірювання горизонтального кута на пункті п.п.3.
• Далі, як досіописано, пе реходимо на пункт п.п.4, ітак поступаємо до завершення вимірювань на останньому прилеглому куті.
• Якщо вимірювання планують завершити не закінчивши всіх вимірювань, то прилад на останньому пункті з якого виконують вимірювання і марку на передньому пункті, центрують з точністю 1 мм.
• Продовжуючи вимірювання, після перерви, центрують марку на задньому пункті, інапунктідеустановленийприладзточністю1мм.Нанаступнихвизначуваних пунктах точність центрування може бути дещо меншою – 3-5 мм.
17
•На вихідних пунктах у кінці ходуприлади центрують з точністю 1 мм.
Кути можнавимірювати якщо зображеннявізирноїцілінедрижить, абоколи дрижання слабкі. На пункті спостережень, після установлення чіткого зображення предмета та сітки штрихів, бажано вже не обертати діоптрійне кільце.
Пояснення щодо триштативної системи вимірювання горизонтальних кутів
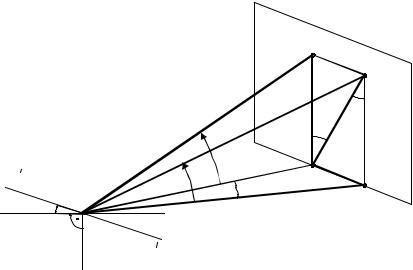
У вихідних пунктах А, B, C і D прилад івізирні пристосування зцентровані з точністю 1 мм (безпомилково). У визначуваному пункті 1 прилад і візирні пристосування зцентровані з
лінійною похибкою е уточці1′. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
Для правильно зцентрованих приладу і візирних пристосувань у пункті 1, будуть |
||||||||||||||||||||||
зцентрованііз лінійною |
|
|
|
1 |
|
|
|
|
|
′ , 1′ |
, |
′ . |
|
( 1 |
+ 2) |
|||||||||
, відповідно. Отжеми виміряємо помилковікути |
||||||||||||||||||||||||
виміряні безпомилкові кути |
|
, |
, |
, |
|
. Якщо на пункті 1 прилад і візирні пристосування |
||||||||||||||||||
|
|
Як видно із рисунка |
|
|
= |
|
|
|
= |
|
, як |
|
|
|
|
, |
′ |
″ , |
||||||
|
|
|
|
|
|
|
похибкою е,то цікути будуть виміряніз похибками |
|||||||||||||||||
більшим на |
|
, кут у |
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
||||||||
|
+ |
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
1 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
різносторонні кути. Кут у точціВ буде |
||||||
|
|
|
|
|
точці С теж буде більшим на |
2 |
|
, а кут уточці1 буде меншим на |
||||||||||||||||
|
|
Отже |
|
|
|
|
|
|
|
+ - 1- |
= 0. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Тобто сума кутів буде такою ж, як іпід час правильного центрування уточці1.
A |
|
|
|
|
С |
D |
|
|
1 |
S2 |
|
||
S1 |
1 |
|
||||
e |
|
e |
|
|
e |
|
B |
|
|
1 |
|
|
C |
|
1 |
|
1 |
2 |
|
|
1′
Рис. 2. Вимірювання кутів у триштативній системі
2.14.Похибки у вимірюванні кута через приладові похибки
2.14.1. Обґрунтування перевірки рівня при алідаді горизонтального круга.
V |
Z |
|
|
|
L1 |
|
b |
|
L1 |
О |
a |
|
b |
|
|
|
|
b |
|
|
L |
|
|
|
Z1 |
V1 |
Рис. 5.19. Перевірка рівня |
||
До початку всіх перевірок та досліджень теодоліт чи електронний тахеометр приводять у робоче положення (вертикальну вісь обертання установлюють прямовисно) за допомогою рівня(бочкового, електронного, сферичного). Похибка у встановленні вертикальної осі прямовисно може впливати на величину інших
L похибок. Тому розглянемо детальніше цю перевірку на прикладі бочкового рівня при алідаді горизонтального круга.
Вісь бочкового рівня алідади горизонтального круга має бути перпендикулярна до вертикальної осі обертання теодоліта.
Нехай LL1 – вісь бочкового рівня розташована горизонтально (рис. 5.19).
18

Вертикальна вісь обертання теодоліта VV1 не перпендикулярна до осі рівня і нахилена відносно прямовисної лінії ZZ1 на кут β. Обернемо алідадну частину кутомірного приладу разом з рівнем, на 180o. Вісь VV1 залишиться в попередньому положенні, а LL1 займе положення L'L'1, відхилившись від попереднього положення на кут α. З’єднаємо точки Lі L'. Отримана лінія LL' є перпендикулярною до осі теодоліта VV1 (тому що точка L обертається навколо цієї осі). Як бачимо з рисунка, кут L1LL' дорівнює куту VOZ, як кути із взаємно перпендикулярними сторонами. Трикутник LОL' рівнобедрений, так як ОL=ОL' (під час обертання на 180o точка Lпотрапить в L'), а кут α є зовнішнім кутом цього трикутника
α=2β.
Отже, для того, щоби вісь теодоліта зайняла прямовисне положення її необхідно нахилити на кут
β = α/2,
тобто на половину нахилення осі рівня після обертання його на 180o.
Для перевірки установлюють вісь теодоліта чи електронного тахеометра приблизно прямовисно. Тоді встановлюють вісь рівня паралельно до двох підіймальних ґвинтів і точно установлюють бульбашку рівня на середину. Обертають алідадну частину на 90o, і третім підіймальним ґвинтом точно установлюють бульбашку рівня на середину. Обертають алідадну частину досі згаданих приладів на 180o. Якщо бульбашка рівня залишилася на середині, то умова виконується. Якщо ні, то наполовинувідхилення бульбашкупереміщають до середини виправними ґвинтами бочкового рівня. Перевірку повторюють.
Деякі відхилення рівня можуть виникати внаслідок хитання вертикальної осі. Але у точних теодолітах хитання осі 2-4", що для ціни поділки рівня у точних теодолітах – 15"- 20" (у електронних топоґрафічних тахеометрів – 40") становить 1/5 – 1/10 частину поділки рівня.
1.Горизонтальна і вертикальна осі обертання кутомірного приладу мають бути
перпендикулярними.
Похибка у вимірюванні кута через нахил горизонтальної осі (осі обертання труби) виникає внаслідок неперпендикулярності її до вертикальної осі, та похибки встановлення останньої прямовисно у прямовисній площині горизонтальної осі, коли лінія візування
спрямовананавізирнуціль. Якщо вісь обертання труби НН1 (рис.2.28)горизонтальна,то лінія |
|||||
такий же кут " і", а центр сітки |
|
1 |
|
|
|
візуванняописуватимепрямовиснуколімаційнуплощину, щопроходить через точки mМ. Для |
|||||
нахиленої горизонтальної осі труби |
′ |
|
′ на кут "і" колімаційна площина буде нахилена на |
||
|
штрихів під час обертання труби описуватиме конусну |
||||
поверхню з вершиною у точці перетину осейО. Якщо нахилити трубу на кут |
ν , то лінія |
||||
візування потрапить з точки m в точкуМ1, а відлік горизонтального круга буде такий же як під час спрямування на точку m. Щоби лінія візування була спрямована на спостережувану точку Мїї необхідно повернути на кут ε . Відлік – це віддаль від нульового штриха круга до перетинуйогопрямовисноюплощиною,якавміщаєлінію візування що проходить через точку спостереження.Тобто похибка увідлікудорівнюватимеε .Знайдемозалежність між похибкою
ε у відліку, кутом нахилення горизонтальної осіiта кутом нахилення |
лінії візування до |
|||||
|
|
1; |
запишемо |
|
||
горизонту –ν . Із прямокутних трикутників Оmm1 і |
М1mm1 |
|
||||
|
і = |
1 |
|
|
|
|
|
і |
1 |
. |
|
(37) |
|
Поділимо перше рівняння на друге |
|
1 |
1. |
|
||
= |
1 1 |
|
|
|||
Із трикутника ОМ1m1 |
|
= |
1 |
|
|
|
Підставивши (38) в (37), отримаємо |
|
= |
1 |
(38) |
||
|
|
|
|
1 1. |
||
|
19 |
|
|
|
|
|
|
|
|
mβi |
= і × |
. |
(39) |
|
|
|
=ε1 |
−ε2 . |
||||
Похибка же у вимірюванні кута |
|
дорівнюватиме різниці похибок укожний напрям. |
|||||
|
|
|
P |
|
|
|
|
|
|
|
|
M |
|
|
|
|
|
|
|
|
M1 |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
i |
|
|
H |
|
n |
|
|
m |
|
|
n |
e |
|
m1 |
|
|||
H i |
O |
|
|
|
|
||
|
|
|
|
|
|
||
|
H1 |
|
|
|
|
|
|
H1
Рис. 2.28. До похибки у вимірюванні кута через нахил горизонтальної осі.
З урахуванням (39) запишемо |
|
mβi =i(tgν1 −tgν2 ) . |
(40) |
Якбачимо із формули (40)дляоднакових, зазнакомівеличиною,кутів нахилунаобидва |
|
спостережувані напрями mβi = 0. Якщо ν1 і ν2 мають різні знаки, то mβi |
буде дорівнювати |
суміпохибок укожний напрям.
Якщо вісь обертання теодоліта прямовисна, то середнє значення відліку із двох півприйомів будевільним відпохибки нахилугоризонтальноїосі, томущо кутε , для кожного півприйому матиме різнізнаки.
Навіть, якщо осі перпендикулярні між собою, але внаслідок неточного установлення вертикальної осі прямовисно у прямовисній площині горизонтальної осі, то остання також буде нахилена і похибка у відліках для різних кругів матиме один знак. Томупід час вимірювань кутів, що мають напрями з різними кутами нахилу необхідно старанно установлювати вертикальну вісь теодоліта прямовисно. Для точних теодолітів величина
неперпендикулярності осей (кут і) не має перевищувати 5″. Якщо потрібно, то додатково використовують накладний рівень.
Перевіряють перпендикулярність осей так.Теодоліт чи електронний тахеометр, розташовують на віддалі 3-4 м від стіни і ретельно установлюють його уробоче положенняза допомогою накладного рівня. Вибирають або позначають на стіні точку А розташовану під кутом нахилу ν1≈ +20º. Нахиляють трубу вниз і приблизно (±1º) на одній прямовисній лінії з першою під таким же кутом нахилу ν2≈ -20º, вибирають або позначають другу точкуВ. Точки вибирають таким чином, щоби під час візування на них не потрібно було б змінювати фокусування труби (рис.2.29).
Вибравши точки спрямовують зорову трубу центром сітки штрихів на верхню точку А і відлічуютьгоризонтальний,напр. КЛ1,тавертикальний,напр. Л1,круги.Спрямувавшизорову трубу центром сітки штрихів на нижню точку, аналогічно відлічуютьКЛ2таЛ2.
Перевівши зорову трубу через зеніт обертаємо алідаду за ходом годинникової стрілки і візуючи на верхню і нижню точки відлічуємо знову горизонтальний та вертикальний круги. Отримаємо відповідно КП3іП3 та КП4і П4. Такі вимірювання становлять один прийом.
20
Неперпендикулярність осей визначають парною (2-4) кількістю прийомів, обертаючи алідаду тільки за ходом годинникової стрілки.
Для точнихтеодолітів неперпендикулярність осей немаєперевищувати 5″. Ціна поділки бочкового рівня при алідадігоризонтального круга у точних теодолітів 20″. Отже установити вертикальнувісь приладупрямовисно2 × 0,15можна= з2граничною× 0,15 × 20похибкою= 6
де – ціна поділки рівня. Ця похибка входитиме в ″,похибку визначення кута неперпендикулярності. Тому дослідження неперпендикулярності осей можна виконувати тільки з використанням накладного рівня, який має цінуподілки не більше 5″.
В топоґрафічних електронних тахеометрах ціна поділки рівня при алідаді горизонтального круга сягає 40″. Тоді гранична похибка установлення вертикальної осі прямовисно дорівнюватиме 12″.Отже, у разі виконання таких досліджень, там де немає компенсатора прямовисності вертикальної осі, також потрібно використовувати накладний рівень з досіописаною ціною поділки.
Пояснення. Нехай точки А, О, В розташовані на одній прямовисній лінії. Припустимо, що колімаційна похибка с = 0. Якщо спрямувати зорову трубу із кругом лівобіч і кругом правобіч на точку О, що розташована на висоті приладу, і відлічити горизонтальний круг – КЛ і КП, то с = КЛ - КП = 0.
Нехай горизонтальна вісь приладу не перпендикулярна до вертикальної і, для круга лівобіч, нахилена відносно горизонту ліворуч.
Піднявши зорову трубу об’єктивом уверх, відносно точки О, центр сітки штрихів потрапить не у правильно розташовану точку А, а в уявну точку А1 (відлік горизонтального круга дорівнюватиме КЛ, такий як на точку О). Для того щоби спрямувати зорову трубу на точку А, потрібно алідадну частину обернути правобіч (відлік горизонтального круга дорівнюватиме КЛ1).
Опустивши зорову трубу вниз, відносно точки О, центр сітки штрихів потрапить не у правильно розташовану точку В, а в уявну точку В1 (відлік горизонтального круга дорівнюватиме КЛ). Для того щоб спрямувати зорову трубу на точку В, потрібно алідадну частину обернути ліворуч (відлік горизонтального круга дорівнюватиме КЛ2).
Перевівши зорову трубу через зеніт спрямуємо зорову трубу знову на точку О. Тепер горизонтальна вісь приладу для круга правобіч, нахилена відносно горизонту праворуч
Z1 |
С1 |
Z2 |
|
ν1 |
Горизонтальна лінія |
ν2 |
|
|
С2 |
S= 4 м
21
А1 А (КЛ1, Л1)
(КП3, П3)
А2
і
О(КЛ, КП)
В2 |
(КЛ2, Л2) |
|
В(КП4, П4) |
|
В1 |
Рис.2.29. До перевірки перпендикулярності горизонтальної і вертикальної осей теодоліта
Піднявши зорову трубу об’єктивом вверх, відносно точки О, центр сітки штрихів потрапить не в точку А , а в уявну точку А 2 (відлік горизонтального круга дорівнюватиме КП). Для того щоб спрямувати зорову трубу на точку А, потрібно алідадну частину обернути ліворуч (відлік горизонтального круга дорівнюватиме КП3).
Опустивши зорову трубу об’єктивом вниз, відносно точки О, центр сітки штрихів потрапить не в точку В, а в уявну точку В 2 (відлік горизонтального круга дорівнюватиме КП). Для того щоб спрямувати зорову трубу на точку В, потрібно алідадну частину обернути праворуч (відлік горизонтального круга дорівнюватиме КП4).
Як бачимо, незалежно від того, що колімаційна похибка фактично дорівнює нулеві (у разі спрямування на точку О), в дійсності, спостерігаючи верхню і нижню точки вона існуватиме. Зауважмо, що знаки колімаційної похибки для верхньої і нижньої точок будуть різними.
Якщо колімаційна похибка дорівнює нулеві (у разі спрямування на точку О), горизонтальнаівертикальнаосі перпендикулярні міжсобою, алевертикальнавісь теодоліта не прямовисна, нахилена у прямовисній площині горизонтальної осі (не точно відгоризонтований прилад). Тоді горизонтальна вісь приладу буде також нахилена і в результаті вимірювань отримаємо такі ж похибки, як із неперпендикулярними осями. Позірна величина неперпендикулярності дорівнюватиме похибці нахилення вертикальної осі.
За відліками вертикального круга обчислюють на верхню і нижню точки кути нахилу (зенітні відстані) для кожного прийому і виводять із них середні значення для верхньої ν1 = 90°- z1, інижньої ν2 = z2 -90° точок.
Для електронного тахеометра установлюють відлічування вертикального круга – кут нахилу.
Обчислюють колімаційні похибки для кожного прийому на верхню і нижню точки та
середні значення для верхньоїс1 інижньої с2 |
точок у секундах. |
|
|
|
|
|
||||||||||||||||||||||||||||||
Якщо кут і більшийдопуску, |
то= 0,5( 1 − |
2) 1 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
Якщо |
ν1 =-ν2,то кут неперпендикулярності осей обчислюють |
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
виправлення виконують у майстерні обертанням |
|||||||||||||||||
ексцентричного кільця лаґери. Після виправлення перевірку повторюють. |
||||||||||||||||||||||||||||||||||||
Наприклад. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Приклад. Теодоліт Theo 010 № 2754 |
|
|
= 25 35 45′ |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
КЛ2 |
= |
24°42'03″; 1 |
= 90 −64 24 15′ |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
КЛ1 |
= |
24°45'55″ |
|
|
|
|
|
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
′ |
|
|
|
|
|
|
|
|
|
||
Л1 = |
64°24'15″; |
|
|
|
|
|
° |
|
|
° |
|
|
|
|
″ |
|
|
|
° |
|
″. |
|
|
|
|
|
|
|
|
|||||||
КП3 |
= 204°45'45″;2 |
= 90° |
− 115°35 00 |
|
|
= −′25°35 00 . |
|
|
′ |
|
|
|
||||||||||||||||||||||||
Л2 = 115°35'00″; |
|
= 90 |
|
|
|
−(360 |
|
|
|
|
|
″ |
|
|
|
|
|
|
″ |
|
|
|
|
|
|
|||||||||||
КП4 |
= 204°42'25″; 3 |
|
|
|
|
|
−295 |
|
35′ 51 ) = 25 35 51′ |
|
|
|||||||||||||||||||||||||
П3 = 295°35'51″; |
4ν=, |
90 |
|
° |
|
|
|
|
|
° |
|
|
|
|
|
|
° |
|
″ |
|
|
° |
|
34 |
|
″. |
||||||||||
Як бачимо ν |
|
|
|
− (360 − 244′ |
25 20 ) |
= −25 |
|
′40 |
|
|||||||||||||||||||||||||||
П4 = 244°25'20″; |
|
|
|
|
° |
|
|
|
|
° |
35 + |
|
° |
4 |
″ |
|
|
|
|
° |
|
|
|
|
″. |
|||||||||||
Обчислюємо |
≈ − 2 |
|
|
|
|
|
= 25 |
° |
|
|
|
|
|
25 35 19 |
″. |
|||||||||||||||||||||
|
|
1 |
|
|
|
сер |
|
|
|
|
|
|
|
45+00+51−20 = |
|
|
° |
|
|
|
||||||||||||||||
|
|
|
|
|
|
тому обчислюємо середнє абсолютне значення кута нахилу |
||||||||||||||||||||||||||||||
|
|
|
колімаційнупохибку на верхню і нижню точки |
|
|
|||||||||||||||||||||||||||||||
|
|
|
|
|
|
с1 = 0,5 (24°45'55″ - 204°45'45″ + 180° ) = + 5″; |
||||||||||||||||||||||||||||||
|
|
|
|
|
|
с2 |
|
|
|
0,5 (24°42'03″ - 204°42'25″ + 180° ) = -11″. |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
= |
0,5[+5 −(−11)] ctg25°35′19″ |
= 16, 7″. |
|||||||||||||||||||||||||||
Обчислюємо кут неперпендикулярності осей |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
22 |
|
|
|
|
|
|
|
|
|
|
|
||
Висновок. Неперпендикулярність осей недопустима. Прилад необхідно виправляти у майстерні.
2. Вплив неперпендикулярності візирного променята горизонтальної осі кутомірного приладу на точність вимірювання горизонтальних кутів (колімація).
Лінія візування має бути перпендикулярною до горизонтальної осі теодоліта.
Колімація (від collimo, спотворення правильного) це кут між дійсним положенням лінії візування і її положенням перпендикулярним до горизонтальної осі. Вплив колімації на виміряний напрям залежить як від її величини, так і від кута нахилення спостережуваного напряму.
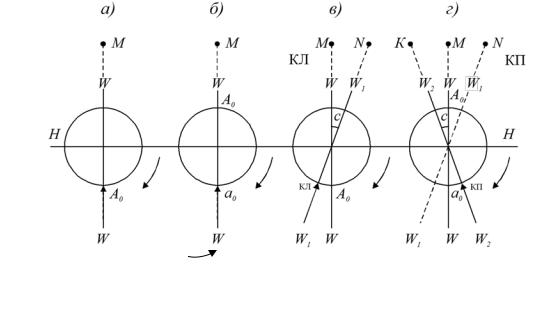
Колімаційною похибкою сназивають проєкціюколімаційного кута на горизонтальну площину між дійсним положенням лінії візування зорової труби і її положенням перпендикулярним до горизонтальної осі приладу. На рис.5.21 це кут відхилення лінії візуванняWWвід перпендикуляра до горизонтальної осі НН.
Напрям зростання відліків
Рис. 5.21. До визначення колімаційної похибки
Якщо лінія візування перпендикулярна до осі обертання труби (рис. 5.21, а), то під час візуваннянаточкуM для круга, наприклад, лівобіч матимемо відлікгоризонтальногокругаАо. Колитрубуперевести через зеніт іобернути алідадуна 180о, то лінія візуванняWW залишиться в попередньому положенні і буде спрямована знову в точку М. Відлік для горизонтального круга правобіч дорівнюватиме – ао(рис. 5.21, б)
ао = Ао+180о. |
(2.1) |
Допустимо, що лінія візуванняW1W1 не перпендикулярна до горизонтальної осі НН іспрямована вточкуN. Тоді відлікгоризонтального кругадорівнюватиме КЛ (рис. 5.21, в). Для того,щобилінія візуваннябулаперпендикулярноюдогоризонтальноїосітруби,тобтозаймала положення WW її необхідно повернути на кут с. Правильний відлік А0, (як видно з рис. 5.2 1, в) можна записати
Аo = КЛ - с. |
(2.2) |
Якщо алідадну частину обернути на 1800 і трубу перевести через зеніт, то лінія візуванняW1W1займе положення W2W2(рис. 5.21, г) ібуде спрямована в якусь точкуK. Відлік горизонтального кругадорівнюватиме КП, і відрізнятиметься від правильного також на кут с. Правильний відлік, коли лінія візування займала би перпендикулярне до горизонтальної осі положення дорівнює
аo = КП + с. |
(2.3) |
23
Підставивши (2.1) в (2.3), отримаємо: |
|
Аo = КП+с-180o. |
(2.4) |
Додаймо рівняння (2.2) і(2.4) |
|
2Аo = КЛ+КП-180o, |
|
і |
|
Аo = (КЛ+КП-1800)/2. |
(2.5) |
Як бачимо, середнє значення із відліків двох кругів вільне від колімації. Для |
|
знаходження колімаційноїпохибки, прирівняємо правічастини (2.2) і(2.4) |
|
КЛ-с = КП+с-180o; |
|
с = (КЛ-КП-180o)/2. |
(2.6) |
Тобто, колімаційна похибка (для горизонтального положення лінії візування) дорівнює половині різниці відліків горизонтального круга, отриманих під час спрямування на одну і ту ж точкупри двох кругах.
Допустима величина колімаційної похибки 15" і 5" відповідно для теодолітів типу Т5 і Т2. Для топоґрафічних електронних тахеометрів – 20". Цей допуск більший тому, що такувеличину похибки ще компенсує програма тахеометра.
Вплив колімаційної похибки c′′ на окремий напрям кута y′′, залежно від кута нахилу лінії візуванняυo , обчислюють за формулою
|
|
c′′ |
|
|
y′′ = |
|
|
. |
(2.7) |
|
cosυo |
|||
Якщо υo = 0°, cosυo = 1, тоді y′′ = c′′,тобто,якщо вертикальнікути незначні, топохибка |
||||
в напрям дорівнює колімаційній похибці. Якщо |
υo> 0, cosυo< 1, тоді |
y′′> c′′. З цього |
||
зрозуміло,що длявеликихзначеньвертикальнихкутів,впливколімаційноїпохибкиможебути значним. Однак, під час вимірювання кутів зКЛ та КП, y′′ змінює знак і тому колімація не
впливає на середнє значення кута, якщо під час вимірювання кута c′′ незмінна.
2а. Визначення та виправлення кута колімації у кутомірному приладі.
Під час виконання перевірки спостерігають віддалену, розташовану приблизно на висоті приладу, точку.Тобто колімацію, визначають для горизонтального положення лінії візування.
Якщо, обчислена за формулою (2.6), колімаційна похибка більша за допустиму, то виконують виправлення. Для цього обчислюють правильний відлік для того круга, який був останнім, за формулами:
КЛправильний = КЛ2 – с; КПправильний = КП2 + с. |
(2.8) |
Для теодолітів типуТ5, встановлюютьцейвідлікзадопомогоюнавідногоґвинтаалідади. Для електронних тахеометрів під час оптичного виправлення так само, встановлюють
цей відлік за допомогою навідного ґвинта алідади.
Для теодолітів типуТ2 ручкою відлікового мікроскопа установлюють на шкалі одиниці мінут і секунди. Штрихи лімба розійдуться. Навідним ґвинтом алідади суміщають штрихи лімба.
Сітка штрихів в усіх випадках зміститься зі спостережуваної точки. В теодолітах, послабившиодинізвертикальнихюстувальнихґвинтівсітки,горизонтальнимиюстувальними ґвинтами встановлюють центр сітки штрихів на спостережувану точку.
В електронних тахеометрах, виправляють згідно з описом приладу подібно до досі описаного. кутів
У теодолітах типу2Т5К, 2Т2 та похідних від них моделях сітка штрихів закріплена на об’єктивному коліні нерухомо. Тому для усунення колімації повертають усю трубу відносно
24
горизонтальної осі за допомогою клиноподібного кільця, що розташоване між опорним торчаком зорової труби і горизонтальною віссю, так щоби центр сітки штрихів потрапив на спостережувану точку. Клиноподібне кільце обертають за допомогою спеціального ключа.
3.Додаткові приладові похибки вимірюваннягоризонтальних кутів.
3.1. Похибки поділок горизонтального круга.
Точність кругових шкал характеризується похибками нанесення штрихів. Похибки поділяють на довгоперіодичні, які поступово змінюються на всьому крузі та короткоперіодичні (в межах окремого ґрадуса з періодом 15'…1°). Розрізняють також випадкові та систематичні похибки, а їхні суми називають повними похибкаминанесення штрихів. Випадкові похибки в декілька разів менші за систематичні. У сучасних теодолітах похибки діаметрів, тобто середня арифметична похибка двох діаметрально протилежних штрихів лімба, не перевищує 1,5", короткоперіодичні – 1", а випадкові0,1-0,3". Мінімізують вплив цих похибок вимірюванням кутів у різних прийомах на інших частинах лімба, тобто, завдяки зміні положення лімба під час вимірювання.
Ціпохибкипритаманнійелектроннимтахеометрам.Алевимірюватикутинарізних, будь яких, частинах лімба топоґрафічними електронними тахеометрами складно. Для зміни частини лімба, на якомувимірюють кут, тахеометр переставляють у підставці на 120°, тобто вимірювання виконують на трьох положеннях круга. Якщо тахеометр не переставляють у підставці, то для уникн ення похибок записування та обчислень, між прийомами змінюють величинупочаткового відліку.
3.2.Ексцентриситет лімба, алідади та осей.
Якщопродовжитивсіподілкилімба,товониперетнутьсяуточці,якуназиваютьцентром поділок лімба. Незбігання центра поділок лімба горизонтального круга із його віссю обертання, називають ексцентриситетом лімба. Незбігання центра поділок лімба із віссю обертання алідади називають ексцентриситетом алідади. Незбігання осі обертання горизонтального круга із віссю обертання алідади – ексцентриситетом осей. Ціпохибки, якщо вони незначні(0,002 – 0,003 мм), компенсуються, завдяки двостороннім відліковим системам. Але, якщо ексцентриситет значний,то застосування досіописаноїметодики неможе повністю вилучити вплив ексцентриситету на вимірюваний кут, тому що він змінює ціну поділки відлікового мікроскопа. Для односторонніх відлікових систем завдяки вимірюванням кутів з двома розташуваннями вертикального круга КЛ та КП цейвплив,уразівимірювань кутів парною кількістю прийомів, значно зменшується.
3.3.Нахил горизонтального круга.
Похибкувідлікугоризонтального круга, через його нахилможнаобчислитизаформулою
|
|
|
|
1 |
|
′ |
2 |
|
|
|
′′ |
|
′ |
|
(ε ) |
|
sin 2a , |
|
|
δ |
= a |
−a = 4 |
|
|
|
(2.9) |
|||
ρ′ |
|
||||||||
|
|
|
де: a –відлік горизонтального круга від лініїперетинунахиленого ігоризонтального кругів; a′–відлік нахиленого кругавід лінії перетину нахиленого і горизонтального кругів; ε –кут
нахилення лімба. Якщо лімб буде нахилений, наприклад, наε′ |
= 30'= 1800ʺ.Тодімаксимальне |
|||||||
значення похибки відліку δ′′ для a = 45° та a = 135° дорівнюватиме |
||||||||
|
′′ |
1 |
18002 |
|
′′ |
′′ |
|
|
δ |
= 4 |
206265 1 |
. |
|||||
|
= 3,93 ≈ 4 |
|
||||||
Насправді, таких нахилень лімба не буває . Ціна поділки бочкового рівня алідади точних теодолітівтатопоґрафічнихелектроннихтахеометрівнебільша40". Під час відхилення такого рівня на двіподілки, лімб нахилиться тільки на 80", і тоді δ′′ = 0,01". Таким чином, нахилення лімба можна не враховувати, якщо вертикальна вісь теодоліта установлена прямовисно з
25
точністю 1'. Якщо вісь рівня не перпендикулярна до вертикальної осі обертання теодоліта (не виконана перевірка бочкового рівня), або недбало виконано горизонтування приладу, тоді нахилиться і вісь обертання труби і похибка у відліку буде значна, і визначатиметься за формулою (2.9).
3.4.Рен оптичного мікрометра.
Ренце різниця між ціною половини поділки шкали лімба і її значенням, отриманим за допомогою шкали мікрометра. Вплив ренамінімізується зміною збільшення мікроскопа оптичного мікрометра, через який розглядають зображення поділок лімба. Якщо збільшення мікроскопа надлишкове,рен додатний; якщо недостатнє,рен від’ємний. Для юстування рена, якщо збільшення мікроскопа надлишкове,необхідно об’єктив мікроскопа віддалити відлімба. Для недостатнього збільшення необхідно, навпаки, наблизити об’єктив до лімба. Якщо виконано дослідження рена і відомо точне значення ренаr , тодіможна майже повністю
звільнитися від впливурена введенням поправки увідлікиδri заформулою
δr |
= |
2r |
c . |
(2.10) |
|
λ |
|||||
i |
|
i |
|
||
У формулі (2.10) λ – ціна найменшої поділки лімба; ci |
– відлік оптичного мікрометра |
||||
в мінутах дуги. Під час вимірювання ренr , зазвичай не враховують, якщо його значення під час точного вимірювання кута менше за 0,5".
В електронних тахеометрах така похибка відсутня.
3.5.Систематичні похибки поділок шкали мікрометра.
Якщо малий кут β вимірювати в поділках мікрометра на різних частинах його шкали, тоді, під час відсутності систематичних похибок мікрометра, значення кута β маєбути
однаковим. За наявності систематичних похибок, значення кута,на різних частинах шкали,буде неоднакове. Це справедливо, якщо не діють інші похибки вимірювання. Томукут β має бути стабільним і малим. Наприклад, шкала мікрометра теодоліта Т2 має 10'. Якщо
взяти малий кут, що дорівнює 2' тодійого можна виміряти на п’яти різних частинах шкали: 0'- 2'; 2'-4'; 4'-6'; 6'-8'; 8'-10'.
Для дослідження виконують прямий та зворотний ходи. Для підвищення точності вимірювання, можна на кожній з п’яти частин шкали виміряти кут 4 рази (два прямих та два зворотних ходи). Оцінюють наявність систематичних похибок за помітними систематичними змінами кута. Якщо, наприклад, під час переходу від першої частини шкали 0'-2' до п’ятої частини 8'-10' кут β весь час збільшується або зменшується, тодівважають, що систематичні
похибки мікрометра існують. Якщо ж такоїзакономірностів рядівимірювань кута βi немає,
тоді немає підстави говорити, що систематичні похибки поділок шкали більші за точність вимірювання.
3.6.Зміна розташування візирної осі під час перефокусування труби.
Під час перефокусування труби в її корпусі переміщують двоввігнуту фокусуючу лінзу. Зміна розташування цієї лінзи (частини телеоб’єктива труби) викликає зміну розташування візирної осі. Це виникає тоді, коли спостерігач на кожний напрям (залежно від довжини стороникута) перефокусовуєтрубу. Вплив перефокусуванняпрактичнонеможливовилучити, якщосторони,щостворюютькут,значновідрізняютьсязадовжиною.Величинутакоговпливу можна знайти, 26изначенням зміни колімаційної похибки на близькі та далекі візирні цілі. Нагадаємо, що мінімальні сторони поліґонометрії для 4 класу – 250 м; 1 розряду – 120 м, 2 розряду – 80 м. Приблизно на цих віддалях можуть бути близькіцілі, далекіцілі– на віддалях більше кілометра. Тому, стараються не створювати кути зі значною різницею довжин сторін.
26
Дослідження подано уметодичних рекомендаціях
27

1. Вплив неперпендикулярності візирного променя та горизонтальної осі кутомірного приладу на точність вимірювання горизонтальних кутів (колімація).
Лінія візування має бути перпендикулярною до горизонтальної осі теодоліта.
Колімація (від collimo, спотворення правильного) це кут між дійсним положенням лінії візування і її положенням перпендикулярним до горизонтальної осі. Вплив колімації на виміряний напрям залежить як від її величини, так і від кута нахилення спостережуваного напряму.
Колімаційною похибкою с називають проєкцію колімаційного кута на горизонтальну площину між дійсним положенням лінії візування зорової труби і її положенням перпендикулярним до горизонтальної осі приладу. На рис. 5.21 це кут відхилення лінії візування WW від перпендикуляра до горизонтальноїосі НН.
Напрям зростання відліків
Рис. 5.21. До визначення колімаційної похибки
Якщо лінія візування перпендикулярна до осі обертання труби (рис. 5.21, а), то під час візування на точку M для круга, наприклад, лівобіч матимемо відлік горизонтального круга Ао. Коли трубу перевести через зеніт і обернути алідаду на 180о, то лінія візування WW залишиться в попередньому положенні і буде спрямована знову в точку М. Відлік для горизонтального круга правобіч дорівнюватиме – ао (рис. 5.21, б)
ао = Ао+180о. |
(2.1) |
Допустимо, що лінія візування W1W1 не перпендикулярна до горизонтальної осі НН і спрямованав точкуN. Тоді відлікгоризонтального круга дорівнюватиме КЛ (рис. 5.21, в). Для того,щобилініявізуваннябулаперпендикулярноюдогоризонтальноїосітруби,тобтозаймала положення WW її необхідно повернути на кут с. Правильний відлік А0, (як видно з рис. 5.2 1, в) можна записати
Аo = КЛ - с. |
(2.2) |
Якщо алідаднучастинуобернути на 1800 ітрубуперевести через зеніт, то лінія візування W1W1 займе положення W2W2 (рис. 5.21, г) і буде спрямована в якусь точку K. Відлік горизонтального круга дорівнюватиме КП, і відрізнятиметься від правильного також на кут с. Правильний відлік, коли лінія візування займала би перпендикулярне до горизонтальної осі положення дорівнює
аo = КП + с. |
(2.3) |
Підставивши (2.1) в (2.3), отримаємо: |
|
Аo = КП+с -180o. |
(2.4) |
Додаймо рівняння (2.2) і (2.4) |
|
2Аo = КЛ+КП-180o, |
|
і |
|
Аo = (КЛ+КП-1800)/2. |
(2.5) |
Як бачимо, середнє значення із відліків двох кругів вільне від колімації. Для |
|
знаходження колімаційноїпохибки, прирівняємо правічастини (2.2) і(2.4) |
|
КЛ-с = КП+с-180o; |
|
с = (КЛ-КП-180o)/2. |
(2.6) |
Тобто, колімаційна похибка (для горизонтального положення лінії візування) дорівнює половині різниці відліків горизонтального круга, отриманих під час спрямування на одну і ту ж точкупри двох кругах.
Допустима величина колімаційної похибки 15" і 5" відповідно для теодолітів типу Т5 і Т2. Для топоґрафічних електронних тахеометрів – 20". Цей допуск більший тому, що таку величину похибки ще компенсує програма тахеометра.
Вплив колімаційної похибки c′′ |
на окремий напрям кута y′′, залежно від кута нахилу |
||||
лінії візування υo , обчислюють за формулою |
|
c′′ |
|
||
|
|
|
|
||
|
y′′ = |
|
|
. |
(2.7) |
|
|
cosυo |
|||
Якщо υo = 0°, cosυo = 1, тоді y′′ |
= c′′,тобто,якщо вертикальнікути незначні, то похибка |
||||
в напрям дорівнює колімаційній похибці. Якщо |
υo> 0, cosυo< 1, тоді |
y′′> c′′. З цього |
|||
зрозуміло,що длявеликихзначеньвертикальнихкутів,впливколімаційноїпохибкиможебути значним. Однак, під час вимірювання кутів з КЛ та КП, y′′ змінює знак і тому колімація не
впливає на середнє значення кута, якщо під час вимірювання кута c′′ незмінна.
2а. Визначення та виправлення кута колімації у кутомірному приладі.
Під час виконання перевірки спостерігають віддалену, розташовану приблизно на висоті приладу, точку. Тобто колімацію, визначають для горизонтального положення лінії візування.
Якщо, обчислена за формулою (2.6), колімаційна похибка більша за допустиму, то виконують виправлення. Для цього обчислюють правильний відлік для того круга, який був останнім, за формулами:
КЛ правильний = КЛ2 – с; КП правильний = КП2 + с. |
(2.8) |
ДлятеодолітівтипуТ5,встановлюютьцейвідлікзадопомогоюнавідногоґвинтаалідади. Для електронних тахеометрів під час оптичного виправлення так само, встановлюють
цей відлік за допомогою навідного ґвинта алідади.
Для теодолітів типуТ2 ручкою відлікового мікроскопа установлюють на шкалі одиниці мінут і секунди. Штрихи лімба розійдуться. Навідним ґвинтом алідади суміщають штрихи лімба.
Сітка штрихів в усіх випадках зміститься зі спостережуваної точки. В теодолітах, послабившиодинізвертикальнихюстувальнихґвинтівсітки,горизонтальнимиюстувальними ґвинтами встановлюють центр сітки штрихів на спостережувану точку.
В електронних тахеометрах, виправляють згідно з описом приладу подібно до досі описаного. кутів
У теодолітах типу2Т5К, 2Т2 та похідних від них моделях сітка штрихів закріплена на об’єктивному коліні нерухомо. Тому для усунення колімації повертають усю трубу відносно горизонтальної осі за допомогою клиноподібного кільця, що розташоване між опорним торчаком зорової труби і горизонтальною віссю, так щоби центр сітки штрихів потрапив на спостережувану точку. Клиноподібне кільце обертають за допомогою спеціального ключа.
2.Додаткові приладові похибки вимірювання горизонтальних кутів.
2.1. Похибки поділок горизонтального круга.
Точність кругових шкал характеризується похибками нанесення штрихів. Похибки поділяють на довгоперіодичні, які поступово змінюються на всьому крузі та короткоперіодичні (в межах окремого ґрадуса з періодом 15'…1°). Розрізняють також випадкові та систематичні похибки, а їхні суми називають повними похибками нанесення штрихів. Випадкові похибки в декілька разів менші за систематичні. У сучасних теодолітах похибки діаметрів, тобто середня арифметична похибка двох діаметрально протилежних штрихів лімба, не перевищує 1,5", короткоперіодичні – 1", а випадкові0,1-0,3". Мінімізують вплив цих похибок вимірюванням кутів у різних прийомах на інших частинах лімба, тобто, завдяки змініположення лімба під час вимірювання.
Ці похибки притаманні й електронним тахеометрам. Але вимірювати кути на різних, будь яких, частинах лімба топоґрафічними електронними тахеометрами складно. Для зміни частини лімба, на якомувимірюють кут, т ахеометр переставляють у підставці на 120°, тобто вимірювання виконують на трьох положеннях круга. Якщо тахеометр не переставляють у підставці, то для уникнення похибок записування та обчислень, між прийомами змінюють величинупочаткового відліку.
2.2. Ексцентриситет лімба, алідади та осей.
Якщопродовжитивсіподілкилімба,товониперетнутьсяуточці,якуназиваютьцентром поділок лімба. Незбігання центра поділок лімба горизонтального круга із його віссю обертання, називають ексцентриситетом лімба. Незбігання центра поділок лімба із віссю обертання алідади називають ексцентриситетом алідади. Незбігання осі обертання горизонтального круга із віссю обертання алідади – ексцентриситетом осей. Ціпохибки, якщо вони незначні(0,002 – 0,003 мм), компенсуються, завдяки двостороннім відліковим системам. Але, якщо ексцентриситет значний,то застосування досіописаноїметодики неможе повністю вилучити вплив ексцентриситету на вимірюваний кут, тому що він змінює ціну поділки відлікового мікроскопа. Для односторонніх відлікових систем завдяки вимірюванням кутів з двома розташуваннями вертикального круга КЛ та КП цей вплив, у разі вимірювань кутів парною кількістю прийомів, значно зменшується.
2.3. Нахил горизонтального круга.
Похибку відліку горизонтального круга, через його нахил можна обчислити за формулою
|
|
|
|
1 |
|
′ |
2 |
|
|
|
′′ |
|
′ |
|
(ε ) |
|
sin 2a , |
|
|
δ |
= a |
−a = 4 |
|
|
|
(2.9) |
|||
ρ′ |
|
||||||||
|
|
|
де: a –відлік горизонтального круга від лініїперетинунахиленого ігоризонтального кругів; a′– відлік нахиленого круга від лінії перетину нахиленого і горизонтального кругів; ε – кут нахиленнялімба.Якщолімббуденахилений,наприклад,на ε′ =30'=1800ʺ. Тодімаксимальне значення похибки відліку δ′′ для a = 45° та a = 135°дорівнюватиме
|
′′ |
|
1 |
|
18002 |
|
′′ |
|
′′ |
|
|
δ |
= |
4 |
|
206265 1 |
≈ 4 |
. |
|||||
|
=3,93 |
|
|||||||||
Насправді, таких нахилень лімба не буває . Ціна поділки бочкового рівня алідади точних теодолітівтатопоґрафічнихелектроннихтахеометрівнебільша40".Підчасвідхиленнятакого рівня на двіподілки, лімб нахилиться тільки на 80", і тоді δ′′ = 0,01". Таким чином, нахилення лімба можна не враховувати, якщо вертикальна вісь теодоліта установлена прямовисно з точністю 1'. Якщо вісь рівня не перпендикулярна до вертикальної осі обертання теодоліта (не виконана перевірка бочкового рівня), або недбало виконано горизонтування приладу, тоді нахилиться і вісь обертання труби і похибка у відліку буде значна, і визначатиметься за формулою (2.9).
2.4.Рен оптичного мікрометра.
Рен це різниця між ціною половини поділки шкали лімба і її значенням, отриманим за допомогою шкали мікрометра. Вплив рена мінімізується зміною збільшення мікроскопа оптичного мікрометра, через який розглядають зображення поділок лімба. Якщо збільшення мікроскопа надлишкове, рен додатний; якщо недостатнє, рен від’ємний. Для юстування рена, якщо збільшення мікроскопанадлишкове, необхідно об’єктив мікроскопа віддалити від лімба. Для недостатнього збільшення необхідно, навпаки, наблизити об’єктив до лімба. Якщо виконано дослідження рена і відомо точне значення рена r , тодіможна майже повністю
звільнитися від впливурена введенням поправки увідліки δri за формулою
δr |
= |
2r |
c . |
(2.10) |
|
λ |
|||||
i |
|
i |
|
||
У формулі (2.10) λ – ціна найменшої поділки лімба; ci |
– відлік оптичного мікрометра |
||||
в мінутах дуги. Під час вимірювання рен r , зазвичай не враховують, якщо його значення під час точного вимірювання кута менше за 0,5".
В електронних тахеометрах така похибка відсутня.
2.5.Систематичні похибки поділок шкали мікрометра.
Якщо малий кут β вимірювати в поділках мікрометра на різних частинах його шкали, тоді, під час відсутності систематичних похибок мікрометра, значення кута β має бути
однаковим. За наявності систематичних похибок, значення кута, на різних частинах шкали, буде неоднакове. Це справедливо, якщо не діють іншіпохибки вимірювання. Томукут β має
бути стабільним і малим. Наприклад, шкала мікрометра теодоліта Т2 має 10'. Якщо взяти малий кут, що дорівнює 2' тодійого можна виміряти на п’яти різних частинах шкали: 0'-2'; 2'- 4'; 4'-6'; 6'-8'; 8'-10'.
Для дослідження виконують прямий та зворотний ходи. Для підвищення точності вимірювання, можна на кожній з п’яти частин шкали виміряти кут 4 рази (два прямих та два зворотних ходи). Оцінюють наявність систематичних похибок за помітними систематичними змінами кута. Якщо, наприклад, під час переходу від першої частини шкали 0'-2' до п’ятої частини 8'-10' кут β весь час збільшується або зменшується, тодівважають, що систематичні
похибки мікрометра існують. Якщо ж такоїзакономірностів рядівимірювань кута βi немає,
тоді немає підстави говорити, що систематичні похибки поділок шкали більші за точність вимірювання.
2.6. Зміна розташування візирної осі під час перефокусування труби.
Під час перефокусування труби в її корпусі переміщують двоввігнуту фокусуючу лінзу. Зміна розташування цієї лінзи (частини телеоб’єктива труби) викликає зміну розташування візирної осі. Це виникає тоді, коли спостерігач на кожний напрям (залежно від довжини стороникута) перефокусовуєтрубу. Вплив перефокусуванняпрактичнонеможливовилучити, якщосторони,щостворюютькут,значновідрізняютьсязадовжиною.Величинутакоговпливу можна знайти, визначенням зміни колімаційної похибки на близькі та далекі візирні цілі. Нагадаємо, що мінімальні сторони поліґонометрії для 4 класу – 250 м; 1 розряду – 120 м, 2 розряду – 80 м. Приблизно на цих віддалях можуть бути близькіцілі, далекіцілі– на віддалях більше кілометра. Тому, стараються не створювати кути зізначною різницею довжин сторін.