

2.5. Решение задач кинематики
Пример 3.
Даны уравнения движения точки в плоскости :
![]() ,
,
![]()
(
,
![]() – в сантиметрах,
– в секундах).
– в сантиметрах,
– в секундах).
Определить:
уравнение траектории точки; для момента
времени
![]() с найти скорость и ускорение точки, а
также ее касательное и нормальное
ускорения и радиус кривизны в
соответствующей точке траектории.
с найти скорость и ускорение точки, а
также ее касательное и нормальное
ускорения и радиус кривизны в
соответствующей точке траектории.
Решение:
1. Для определения уравнения траектории точки исключим из заданных уравнений движения время . Поскольку входит в аргументы тригонометрических функций, где один аргумент вдвое больше другого, используем формулу
![]() :
:
![]() . (102)
. (102)
Из уравнений движения находим выражения соответствующих функций и подставляем в равенство (102). Получим
![]()
 ,
,
![]() ,
,
следовательно,
![]() .
.
О
Рис. 41
![]() . (103)
. (103)
2. Скорость точки найдем по ее проекциям на координатные оси:
![]() ,
,
![]() ,
,
![]() .
.
Для
момента времени
с:
![]()
![]() ,
,
![]() ,
,
![]() . (104)
. (104)
3. Аналогично найдем ускорение точки:
![]() ,
,
![]() ,
,
![]() .
.
Для
момента времени
с:
![]()
![]() ,
,
![]() ,
,
![]() . (105)
. (105)
4. Касательное ускорение найдем, дифференцируя по времени равенство:
![]()
Получим
![]() ,
,
откуда
![]() . (106)
. (106)
Числовые
значения всех величин, входящих в правую
часть (106), определены и даются в (104) и
(105). Подставив в (106) эти числа, найдем
сразу, что при
с:
![]() .
.
5.
Нормальное ускорение точки
![]() .
Подставляя сюда найденные при
с числовые значения
.
Подставляя сюда найденные при
с числовые значения
![]() и
и
![]() ,
получим, что
,
получим, что
![]() .
.
6.
Радиус кривизны траектории
![]() .
.
Подставляя
сюда числовые значения
![]() и
и
![]() при
с, найдем, что
при
с, найдем, что
![]() см.
см.
Ответ: , , , , см.
П
Рис. 42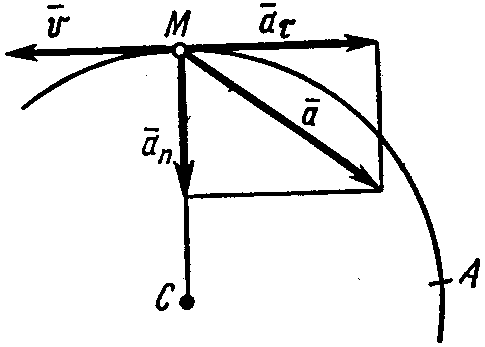 очка
движется по дуге окружности радиуса
очка
движется по дуге окружности радиуса
![]() м по закону
м по закону
![]() ,
(
– в метрах,
– в секундах), где
,
(
– в метрах,
– в секундах), где
![]() (рис. 42).
(рис. 42).
Определить: скорость и ускорение точки в момент времени с.
Решение:
Определяем скорость точки:
![]() .
.
При
с получим
![]()
![]() .
.
Ускорение находим по его касательной и нормальной составляющим:
![]() ,
,
![]() ,
,
![]() .
.
При
с получим
![]()
![]() ,
,
![]() ,
,
![]() .
.
Изобразим
на рис. 42 векторы
![]() и
и
![]() ,
учитывая знаки и считая положительным
направление от
к
.
,
учитывая знаки и считая положительным
направление от
к
.
Ответ:
![]() ,
,
![]() .
.
П ример
5. Механизм
(рис. 43) состоит из стержней 1, 2, 3, 4 и
ползуна
,
соединенных друг с другом и с неподвижными
опорами
ример
5. Механизм
(рис. 43) состоит из стержней 1, 2, 3, 4 и
ползуна
,
соединенных друг с другом и с неподвижными
опорами
![]() и
и
![]() шарнирами.
шарнирами.
Д
Рис. К2,а.
Рис. 43![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() м,
м,
![]() м,
м,
![]() м,
м,
![]() с-1,
с-1,
![]() с-2
(направления
с-2
(направления
![]() и
и
![]() – против хода часовой стрелки).
– против хода часовой стрелки).
О пределить:
пределить:
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() .
.
Решение:
1. Строим положение механизма в соответствии с заданными углами и выбранным масштабом длин (рис. 44; на этом рисунке изображаем все векторы скоростей).
2
Рис. 44![]() .
По данным задачи, учитывая направление
.
По данным задачи, учитывая направление
![]() ,
можем определить
,
можем определить
![]() .
Численно:
.
Численно:
![]() м/с,
м/с,
![]() . (107)
. (107)
Направление найдем, учтя, что точка принадлежит одновременно ползуну, движущемуся вдоль направляющих поступательно. Теперь, зная и направление , воспользуемся теоремой о проекциях скоростей двух точек тела (стержня ) на прямую, соединяющую эти точки (прямая ). Сначала по этой теореме устанавливаем, в какую сторону направлен вектор (проекции скоростей должны иметь одинаковые знаки). Затем, вычисляя эти проекции, находим
![]() ,
,
![]() м/с. (108)
м/с. (108)
3.
Определяем
![]() .
Точка
.
Точка
![]() принадлежит стержню
.
Следовательно, по аналогии с предыдущим,
чтобы определить
,
надо сначала найти скорость точки
,
принадлежащей одновременно стержню
.
Для этого, зная
и
,
строим мгновенный центр скоростей (МЦС)
стержня
.
Это точка
принадлежит стержню
.
Следовательно, по аналогии с предыдущим,
чтобы определить
,
надо сначала найти скорость точки
,
принадлежащей одновременно стержню
.
Для этого, зная
и
,
строим мгновенный центр скоростей (МЦС)
стержня
.
Это точка
![]() ,
лежащая на пересечении перпендикуляров
к
и
,
восставленных из точек
и
(к
перпендикулярен стержень 1). По направлению
вектора
определяем направление поворота стержня
вокруг МЦС
.
Вектор
,
лежащая на пересечении перпендикуляров
к
и
,
восставленных из точек
и
(к
перпендикулярен стержень 1). По направлению
вектора
определяем направление поворота стержня
вокруг МЦС
.
Вектор
![]() перпендикулярен отрезку
перпендикулярен отрезку
![]() ,
соединяющему точки
и
,
и направлен в сторону поворота. Величину
,
соединяющему точки
и
,
и направлен в сторону поворота. Величину
![]() найдем из пропорции:
найдем из пропорции:
![]() . (109)
. (109)
Чтобы
вычислить
и
![]() ,
заметим, что
,
заметим, что
![]() – прямоугольный, так как острые углы в
нем равны 30° и 60°, и что
– прямоугольный, так как острые углы в
нем равны 30° и 60°, и что
![]() .
Тогда
.
Тогда
![]() является равносторонним и
является равносторонним и
![]() .
В результате равенство (3) дает
.
В результате равенство (3) дает
![]() м/с,
м/с,
![]() . (110)
. (110)
Так
как точка
принадлежит одновременно стержню
![]() ,
вращающемуся вокруг
,
то
,
вращающемуся вокруг
,
то
![]() .
Тогда, восставляя из точек
и
перпендикуляры к скоростям
и
,
построим МЦС
.
Тогда, восставляя из точек
и
перпендикуляры к скоростям
и
,
построим МЦС
![]() стержня
.
По направлению вектора
определяем направление поворота стержня
вокруг центра
.
Вектор
направлен в сторону поворота этого
стержня. Из рис. 44 видно, что
стержня
.
По направлению вектора
определяем направление поворота стержня
вокруг центра
.
Вектор
направлен в сторону поворота этого
стержня. Из рис. 44 видно, что
![]() ,
откуда
,
откуда
![]() .
Составив теперь пропорцию, найдем, что
.
Составив теперь пропорцию, найдем, что
![]() ,
,
![]() м/с. (110)
м/с. (110)
4.
Определяем
.
Так как МЦС стержня 2 известен (точка
)
и
![]() м, то
м, то
![]() с–1. (111)
с–1. (111)
5
Рис. 45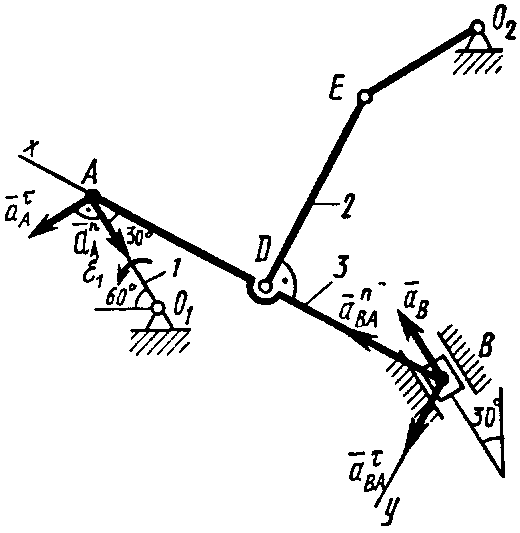 .
Определяем
.
Определяем
![]() (рис. 45, на котором изображаем все векторы
ускорений). Точка
принадлежит стержню
.
Чтобы найти
,
надо знать ускорение какой-нибудь другой
точки стержня
и траекторию точки
.
По данным задачи можем определить
(рис. 45, на котором изображаем все векторы
ускорений). Точка
принадлежит стержню
.
Чтобы найти
,
надо знать ускорение какой-нибудь другой
точки стержня
и траекторию точки
.
По данным задачи можем определить
![]() ,
где численно
,
где численно
![]() м/с2,
м/с2,
![]() м/с2. (112)
м/с2. (112)
Вектор
![]() направлен вдоль
направлен вдоль
![]() ,
а
,
а
![]() – перпендикулярно
.
Изображаем эти векторы на чертеже (см.
рис. 45). Так как точка
одновременно принадлежит ползуну, то
вектор
параллелен направляющим ползуна.
Изображаем вектор
на чертеже, полагая, что он направлен в
ту же сторону, что и
.
– перпендикулярно
.
Изображаем эти векторы на чертеже (см.
рис. 45). Так как точка
одновременно принадлежит ползуну, то
вектор
параллелен направляющим ползуна.
Изображаем вектор
на чертеже, полагая, что он направлен в
ту же сторону, что и
.
Для определения воспользуемся равенством
![]() . (113)
. (113)
Изображаем
на чертеже векторы
![]() (вдоль
от
к
)
и
(вдоль
от
к
)
и
![]() (в любую сторону перпендикулярно
).
Численно
(в любую сторону перпендикулярно
).
Численно
![]() Найдя
Найдя
![]() с помощью построенного МЦС
стержня 3, получим
с помощью построенного МЦС
стержня 3, получим
![]() с–1,
с–1,
![]() м/с2. (114)
м/с2. (114)
Таким
образом, у величин, входящих в равенство
(113), неизвестны только числовые значения
![]() и
и
![]() .
Их можно найти, спроектировав обе части
равенства (113) на какие-нибудь две оси.
.
Их можно найти, спроектировав обе части
равенства (113) на какие-нибудь две оси.
Чтобы определить , спроектируем обе части равенства (113) на направление (ось ). Тогда получим
![]() . (115)
. (115)
Подставив в равенство (10) числовые значения всех величин из (112) и (114), найдем, что
![]() м/с2. (116)
м/с2. (116)
Так
как получилось
![]() ,
то, следовательно, вектор
направлен как показано на рис. 45.
,
то, следовательно, вектор
направлен как показано на рис. 45.
6. Определяем . Чтобы найти , сначала определим . Для этого обе части равенства (113) спроектируем на направление, перпендикулярное (ось ). Тогда получим:
![]() . (117)
. (117)
Подставив
в равенство (12) числовые значения всех
величин из (116) и (112), найдем, что
![]() м/с2.
Знак минус указывает, что направление
противоположно показанному на рис. 45.
м/с2.
Знак минус указывает, что направление
противоположно показанному на рис. 45.
Теперь
из равенства
![]() получим:
получим:
![]() с–2.
с–2.
Ответ:
м/с,
![]() м/с,
м/с,
![]() с–1,
м/с2,
с–1,
м/с2,
![]() с–2.
с–2.
П
Рис. 46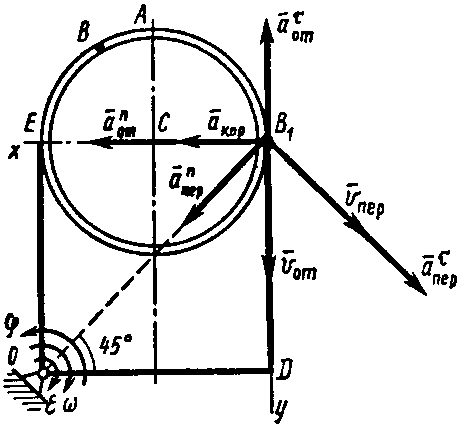
![]() (
(![]() ,
рис. 46) вращается вокруг оси, проходящей
через точку
перпендикулярно плоскости пластины,
по закону
,
рис. 46) вращается вокруг оси, проходящей
через точку
перпендикулярно плоскости пластины,
по закону
![]() (положительное направление отсчета
угла
показано на рис. 46 дуговой стрелкой). По
дуге окружности радиуса
(положительное направление отсчета
угла
показано на рис. 46 дуговой стрелкой). По
дуге окружности радиуса
![]() движется точка
по закону
движется точка
по закону
![]() (положительное направление отсчета
– от
к
).
(положительное направление отсчета
– от
к
).
Дано:
![]() м,
м,
![]() ,
,
![]() (
(![]() – в радианах,
– в метрах,
– в радианах,
– в метрах,
![]() – в секундах).
– в секундах).
Определить:
![]() и
и
![]() в момент времени
в момент времени
![]() с.
с.
Решение:
Рассмотрим
движение точки
как сложное, считая ее движение по дуге
окружности относительным, а вращение
пластины – переносным движением. Тогда
абсолютная скорость
![]() и абсолютное ускорение
и абсолютное ускорение
![]() точки найдутся по формулам:
точки найдутся по формулам:
![]() ,
,
![]() , (118)
, (118)
где, в свою очередь,
![]() ,
,
![]() .
.
Определим все, входящие в равенства (118) величины.
1. Относительное движение. Это движение происходит по закону
![]() . (119)
. (119)
Сначала
установим, где будет находиться точка
на дуге окружности в момент времени
![]() .
Полагая в уравнении (119)
с, получим
.
Полагая в уравнении (119)
с, получим
![]() .
.
Тогда
![]() .
.
Знак
минус свидетельствует о том, что точка
в момент
с находится справа от точки
.
Изображаем ее на рис. 46 в этом положении
(точка
![]() )).
)).
Теперь
находим числовые значения
![]() ,
,
![]() и
и
![]() :
:
![]() ,
,
![]() ,
,
![]() ,
,
где
![]() – радиус кривизны относительной
траектории, равный радиусу окружности
.
Для момента
с, учитывая, что
– радиус кривизны относительной
траектории, равный радиусу окружности
.
Для момента
с, учитывая, что
![]() м, получим
м, получим
![]() м/с,
м/с,
![]() м/с2,
м/с2,
![]() м/с2.
м/с2.
Знаки
показывают, что вектор
![]() направлен в сторону положительного
отсчета расстояния
,
а вектор
направлен в сторону положительного
отсчета расстояния
,
а вектор
![]() — в противоположную сторону; вектор
— в противоположную сторону; вектор
![]() ,
направлен к центру
,
направлен к центру
![]() окружности. Изображаем все эти векторы
на рис. 46.
окружности. Изображаем все эти векторы
на рис. 46.
2.
Переносное движение. Это движение
(вращение) происходит по закону
![]() .
Найдем сначала угловую скорость
.
Найдем сначала угловую скорость
![]() и угловое ускорение
переносного вращения:
и угловое ускорение
переносного вращения:
![]() ,
,
![]()
и при с
![]() с–1
,
с–1
,
![]() с–2. (120)
с–2. (120)
Знаки указывают, что в момент с направления и противоположны направлению положительного отсчета угла ; отметим это на рис. 46.
Для
определения
![]() и
и
![]() находим сначала расстояние
находим сначала расстояние
![]() точки
от оси вращения
точки
от оси вращения
![]() .
Из рисунка видно, что
.
Из рисунка видно, что
![]() м. Тогда в момент времени
с, учитывая равенства (4), получим
м. Тогда в момент времени
с, учитывая равенства (4), получим
![]() м/с,
м/с,
![]() м/с2,
м/с2,
![]() м/с2. (121)
м/с2. (121)
Изображаем
на рис. 46 векторы
и
![]() с учетом направлений
и
и вектор
с учетом направлений
и
и вектор
![]() (направлен к оси вращения).
(направлен к оси вращения).
3. Кориолисово ускорение. Модуль кориолисова ускорения определяем по формуле
![]() ,
,
где
![]() – угол между вектором
и осью вращения (вектором
– угол между вектором
и осью вращения (вектором
![]() ).
В нашем случае этот угол равен 90°, так
как ось вращения перпендикулярна
плоскости пластины, в которой расположен
вектор
.
Численно в момент времени
с, так как в этот момент
).
В нашем случае этот угол равен 90°, так
как ось вращения перпендикулярна
плоскости пластины, в которой расположен
вектор
.
Численно в момент времени
с, так как в этот момент
![]() м/с,
м/с,
![]() с–1,
получим
с–1,
получим
![]() м/с2. (122)
м/с2. (122)
Направление
![]() найдем по правилу Н.Е. Жуковского: так
как вектор
лежит в плоскости, перпендикулярной
оси вращения, то повернем его на 90° в
направлении
,
т.е. по ходу часовой стрелки. Изображаем
на рис. 46. (Иначе направление
можно найти, учтя, что
найдем по правилу Н.Е. Жуковского: так
как вектор
лежит в плоскости, перпендикулярной
оси вращения, то повернем его на 90° в
направлении
,
т.е. по ходу часовой стрелки. Изображаем
на рис. 46. (Иначе направление
можно найти, учтя, что
![]() .)
.)
Таким образом, значения всех входящих в правые части равенств (118) векторов найдены и для определения и остается только сложить эти векторы. Произведем это сложение аналитически.
4.
Абсолютная скорость. Проведем координатные
оси
![]() (см. рис. 46) и спроектируем почленно обе
части равенства
на эти оси. Получим для момента времени
с:
(см. рис. 46) и спроектируем почленно обе
части равенства
на эти оси. Получим для момента времени
с:
![]() м/с,
м/с,
![]() м/с.
м/с.
После этого находим
![]() м/с.
м/с.
Учитывая,
что в данном случае угол между
![]() и
и
![]() равен 45°, значение
можно еще определить по формуле
равен 45°, значение
можно еще определить по формуле
![]() м/с.
м/с.
5. Абсолютное ускорение. По теореме о сложении ускорений
![]() . (123)
. (123)
Для определения спроектируем обе части равенства (7) на проведенные оси . Получим для момента времени с:
![]() м/с2,
м/с2,
![]() м/с2,
м/с2,
После этого находим
![]() м/с2.
м/с2.
Ответ:
![]() м/с,
м/с,
![]() м/с2.
м/с2.