

§ 3. Момент силы относительно оси
М
Рис. 18![]() .
По определению,
.
По определению,
![]() , (13)
, (13)
где
![]() – вектор проекции силы
на плоскость
– вектор проекции силы
на плоскость
![]() ,
перпендикулярную оси Оz,
а точка О – точка пересечения оси Оz
с плоскостью
.
,
перпендикулярную оси Оz,
а точка О – точка пересечения оси Оz
с плоскостью
.
Из определения момента силы относительно оси следует, что введенный выше алгебраический момент силы относительно точки можно считать моментом силы относительно оси, проходящей через эту точку, перпендикулярно плоскости, в которой лежат сила и моментная точка. Момент силы относительно оси можно выразить через площадь треугольника, построенного на проекции силы и точке пересечения О оси с плоскостью:
![]() . (14)
. (14)
Из формулы (14) можно получить следующие важные свойства момента силы относительно оси:
1. Момент силы относительно оси равен нулю, если сила параллельна оси. В этом случае равна нулю проекция силы на плоскость, перпендикулярную оси.
2. Момент силы
относительно оси равен нулю, если линия
действия силы пересекает эту ось. В этом
случае линия действия проекции силы на
плоскость, перпендикулярную оси, проходит
через точку пересечения оси с плоскостью,
соответственно, равно нулю плечо силы
![]() относительно точки О.
относительно точки О.
В обоих этих случаях ось и сила лежат в одной плоскости. Т.о. можно сказать, что момент силы относительно оси равен нулю, если сила и ось лежат в одной плоскости.
§ 4. Связь момента силы относительно оси с векторным моментом силы относительно точки на оси
И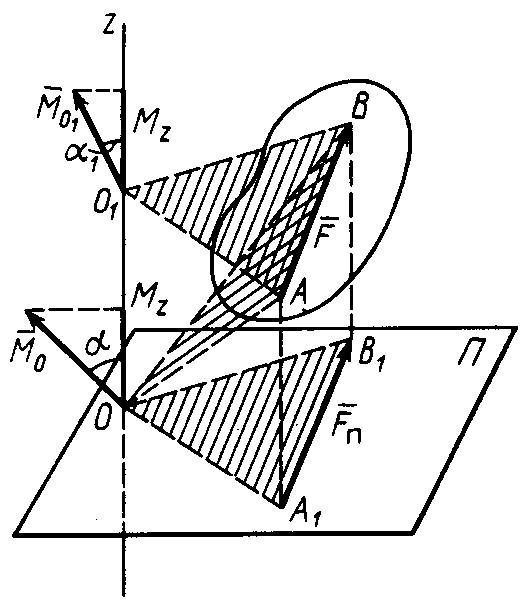 спользуя
формулу (14), имеем (рис. 19):
спользуя
формулу (14), имеем (рис. 19):
![]() .
(14’)
.
(14’)
В
Рис. 19
. (15)
Векторный момент направлен перпендикулярно плоскости треугольника ОАВ. Аналогично, для другой точки О1 оси Оz:
![]() , (16)
, (16)
причем векторный
момент
![]() направлен перпендикулярно плоскости
треугольника О1АВ.
Треугольник ОА1В1
является проекцией треугольников ОАВ
и О1АВ
на плоскость
.
Из геометрии известно, что площадь
проекции плоской фигуры равна площади
проецируемой фигуры, умноженной на
косинус угла между плоскостями, в которых
расположены эти фигуры. Угол между
плоскостями измеряется углом между
перпендикулярами к этим плоскостям.
Перпендикуляром к плоскости треугольника
ОА1В1
является ось Оz,
а перпендикулярами к плоскостям
треугольников ОАВ и О1АВ
– соответственно векторные моменты
и
.
Таким образом,
направлен перпендикулярно плоскости
треугольника О1АВ.
Треугольник ОА1В1
является проекцией треугольников ОАВ
и О1АВ
на плоскость
.
Из геометрии известно, что площадь
проекции плоской фигуры равна площади
проецируемой фигуры, умноженной на
косинус угла между плоскостями, в которых
расположены эти фигуры. Угол между
плоскостями измеряется углом между
перпендикулярами к этим плоскостям.
Перпендикуляром к плоскости треугольника
ОА1В1
является ось Оz,
а перпендикулярами к плоскостям
треугольников ОАВ и О1АВ
– соответственно векторные моменты
и
.
Таким образом,
![]() ,
где
– угол между вектором
и осью Оz.
Отсюда по формулам (14') и (15) имеем:
,
где
– угол между вектором
и осью Оz.
Отсюда по формулам (14') и (15) имеем:
![]() , (17)
, (17)
причем знак
![]() полностью определяется знаком
полностью определяется знаком
![]() .
Аналогично,
.
Аналогично,
![]() ,
,
т. е.
![]() , (18)
, (18)
где О1 – любая точка на оси Оz.
Формулы (17) и (18) отражают искомую связь между моментом силы относительно оси и векторными моментами силы относительно точек, лежащих на этой оси: момент силы относительно оси равен проекции на эту ось векторного момента силы относительно любой точки на оси.
Эту зависимость между моментом силы относительно оси и векторным моментом силы относительно точки на оси можно принять за определение момента силы относительно оси.