

Учебное пособие 800628
.pdfУДК 681.511.4
УПРАВЛЕНИЕ МОБИЛЬНЫМ РОБОТОМ В УСЛОВИЯХ НЕОПРЕДЕЛЕННОСТИ
Ю.М. Рассадин Институт проблем управления им. В.А. Трапезникова РАН
Рассмотрена задача слежения за заданной траекторией без проскальзывания для двухколесного мобильного робота с двигателями постоянного тока в качестве исполнительных устройств. Синтез адаптивного закона управления проведен на основе блочного подхода и скользящих режимов. Обратная связь выбрана в классе разрывных функций с постоянной амплитудой.
CONTROL OF WHEELED MOBILE ROBOT UNDER CONDITIONS OF
UNCERTAINTY
Rassadin Y. M.
Trapeznikov’s Institute of Control Sciences of RAS
Тhe path following problem of tracking a given trajectory for non-holonomic wheeled mobile robot with DC motors as actuators is considered. The synthesis of an adaptive control law is conducted on the basis of the block approach and sliding mode. Feedback law is chosen from the class of discontinuous relay functions with constant amplitude.
Введение
Колесные мобильные роботы (МР) в настоящее время широко используются в промышленных целях (безопасность человеческого персонала в опасных условиях, автоматизированные логистические центры), а также в образовательных целях (дешевые и относительно простые мехатронные системы для знакомства с робототехникой). Задачи управления колесным роботом с неголономными ограничениями рассматриваются уже в течение длительного периода времени [1,2], но в современных работах также уделяется большое внимание этому классу объектов управления [3]. Мобильные роботы с дифференциальным приводом, являясь одними из самых простых мехатронных объектов, в то же время представляют собой идеальный пример для иллюстрации проблем, которые возникают при синтезе обратной связи для исполнительных устройств.
В данной работе основное внимание уделено синтезу закона управления для исполнительных устройств, при котором учитываются как переменные состояния механической природы, так и динамика электроприводов. Стоит заметить, что управляющее воздействие в электромеханических системах почти всегда выбирается разрывным, имеющим релейный характер. Этот факт, а также относительная простота процедуры синтеза, обуславливают в данной работе ограничения на класс возможных функций обратной связи, которые выбираются разрывными с постоянной амплитудой. Физические параметры установки, как правило, известны заранее, но в реальных задачах всегда присутствует некоторая погрешность, конечная точность измерений. Также некоторые параметры могут изменяться во время работы установки. Для набора таких переменных параметров в данной работе предлагается добавить адаптивную составляющую вектора управления, которая будет реализована на основе метода эквивалентного управления [4].
© Рассадин Ю.М., 2018
91
Дальнейшее изложение строится следующим образом. Во втором разделе работы, «Постановка задачи», описан объект управления, введена его математическая модель и критерий задачи управления. Также обсуждается вектор переменных параметров, оценка которого будет получена на основе адаптивной процедуры. Третий раздел посвящен синтезу базового закона управления, который проводится на основе блочного подхода, что позволяет декомпозировать задачу управления на последоватьльно решаемые подзадачи меньшей размерности. В четвертом и пятом разделах приводится описание адаптивной процедуры и её реализации с помощью разрывного входного сигнала с постоянной амплитудой. В «Заключении» обозначены возможные направления дальнейших исследований.
2. Постановка задачи
Рассмотрим задачу слежения для мобильного робота. Желаемая траектория задана на плоскости вектором функиций sd (t) , гладких вместе с двумя первыми производными по времени:
|
x(t) |
& |
x(t) |
&& |
x(t) |
|
|||||
sd |
(t) = |
,sd |
(t) = |
& |
,sd |
(t) = |
&& |
|
(1) |
||
|
y(t) |
|
y(t) |
|
y(t) |
|
|||||
|
|
|
|
|
& |
|
|
|
&& |
|
|
В данной работе проблема планирования траектории не рассматривается, так как основная цель – продемонстрировать процесс связи желаемой траектории как фунцкии времени и задания для исполнительных устройств, для которых потом будет произведен синтез закона обратной связи.
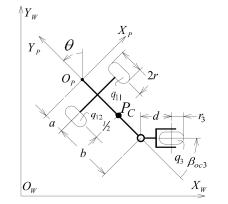
Рассмотрим наиболее часто встречающуюся разновидность автономного мобильного робота – платформу с двумя неориентируемыми ведущими колесами и одним независимым колесом для поддержки равновесия относительно оси ведущих колёс [1]. У такого робота не имеется подруливающих систем, часто выполненных с применением гидравлических элементов. Таким образом, в работе рассмотрен только один тип исполнительных устройств, двигатель постоянного тока. Изменение ориентации робота такой конструкции достигается за счёт разницы между угловыми скоростями ведущих колес.
Рисунок 1. Неголономный мобильный робот с дифференциальным приводом.
Простейшая схема такого робота изображена на рисунке (1). Обозначим точку центра масс робота PC . Также обозначим OP нулевую точку системы координат, связанной с
роботом, относительно которой будет рассматриваться ориентация устройства. Как правило, ось абсцисс направлена вдоль оси вращения колёс и называется поперечной, а ось ординат направляют по нормали к оси вращения колёс и называют продольной. Каждый отдельный экземпляр характеризуется вектором конструктивных физических параметров. Введём их обозначения в таблице 1:
92
Параметр |
Описание |
r |
Радиус ведущих колёс |
r3 |
Радиус вспомогательного опорного колеса |
l |
Расстояние между двумя колесами |
d |
Расстояние от вертикальной оси вращения до центра масс |
|
опорного колеса |
lc |
Расстояние от центра масс до центра ведущей оси |
mc |
Масса неподвижных частей робота |
mv |
Масса каждой из подвижных частей (колесо и ротор) |
IC |
Момент инерции мобильного робота относительно |
|
вертикальной оси, проходящей через центр масс PC |
IW |
Момент инерции подвижных частей робота относительно их |
|
оси вращения |
Im |
Момент инерции подвижных частей робота относительно |
|
вертикальной оси, проходящей через их центр масс |
Таблица 1. Основные обозначения
Стандартно мобильный робот представляют в виде твердого недеформируемого тела, контакт колеса с поверхностью принимают за точку, исключая проскальзывание и пробуксовку. Такие ограничения не позволяют без знания начальных условий однозначно определить состояние объекта по уравнениям динамики и называются неголономными. Кинематические ограничения робота с двумя стандартными колесами описываются уравнениями вида [1]:
|
|
|
J1( c |
|
|
|
& |
J2 = 0 |
|
|
|
|
|||
|
|
|
, oc )R( ) |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
& |
|
|
|
|
|
|
|
|
|
C ( |
c |
, |
oc |
)R( ) & C & |
|
= 0 |
|
|
|
(2) |
||
|
|
|
1 |
|
|
|
2 oc |
|
|
|
|
|
|||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
1 |
|
|
L |
|
|
|
|
|
|
J1 = |
|
0 |
|
|
1 |
|
|
L |
|
|
= diag(r), |
||||
|
|
|
|
|
, J2 |
||||||||||
|
|
cos oc3 |
|
sin oc3 |
Lcos oc3 |
|
|
|
|
|
|||||
|
|
|
1 |
|
|
0 |
|
0 |
|
|
|
|
0 |
|
|
C |
= |
1 |
|
|
0 |
|
0 |
|
,C |
2 |
= |
0 |
, |
||
1 |
|
|
|
|
cos oc3 |
|
|
|
|
|
|
|
|||
|
|
sin oc3 |
|
|
Lsin oc3 |
|
d |
|
|||||||
а oc3 – угол ориентации опорного колеса.
Динамическая модель робота описывается системой обыкновенных диференциальных уравнения вида [1]
q |
|
q |
|
|
|
|
2 |
|
|
|
|
||
& |
|
|
1 |
|
|
|
&1 |
|
H |
(q1)(v G(q1) C(q1 |
,q2 )), |
(3) |
|
q2 |
|
|||||
v& |
|
Av Dq2 Bu, |
|
|
||
где q1 – вектор углов ориентации колес, q2 – вектор соответствующих угловых скоростей,
v – вектор моментов, развиваемых исполнительными устройствами, u – реальное управляющее воздействие. Матрицы H ,C,G имеют следующий вид:
93

|
|
|
|
|
|
|
|
|
|
m |
|
|
|
|
0 |
|
mcdsin(q13) |
|
|
||
|
|
|
H(q ) = |
|
|
0 |
|
|
|
|
m |
|
m dcos(q ) |
|
|
||||||
|
|
|
|
1 |
|
|
mcdsin(q13) mcdcos(q13) |
|
|
c |
13 |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
I |
|
|
|
||||||||
|
|
|
|
|
0 |
|
0 |
mcdq23cos(q13) |
|
1 |
cos(q13) |
cos(q13) |
|||||||||
|
|
C(q |
,q |
) = |
|
0 |
|
0 |
m dq |
|
sin(q ) |
|
G(q ) = |
sin(q ) |
sin(q ) |
|
|||||
|
|
|
|
|
|
|
|
||||||||||||||
|
|
1 |
2 |
|
|
|
|
|
c |
23 |
13 |
1 |
r |
|
13 |
|
13 |
||||
|
|
|
|
|
|
0 |
|
0 |
|
|
0 |
|
|
|
|
b |
|
b |
|
||
где |
m = m 2m ,I = I |
c |
2I |
|
m d2 |
2m b2 |
. Как было упомянуто ранее, в качестве |
||||||||||||||
|
c |
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|||
исполнительных устройств выбраны двигатели постоянного тока. Такой выбор позволяет, не углубляясь в проблемы управления подобными устройствами, тем не менее учесть специфику актуаторов. Конструктивные параметры ДПТ содержаться в диагональных
матрицах A,D,B n n с постоянными положительными коэффициентами.
3. Синтез базового закона управления
Согласно классификации, введенной в [1], такой робот, без подруливаемых колес, относится к типу (2,0) и также может быть описан кинематической позиционной моделью вида
|
x |
= sin( )v, |
|
|
& |
|
|
|
y = cos( )v, |
|
|
|
& |
|
(4) |
|
& = , |
||
|
|
||
где (x, y, ) |
– переменные состояния, v, – обобщенные управляющие воздействия, |
||
продольная и угловая скорости.
Для простоты будем считать, что в нулевой момент времени робот уже находится на желаемой траектории, т.е. q1(0) = q1d (0). Данное предположение не ограничевает
общность наших рассуждений, ведь этого условия всегда можно добиться на этапе планирования траектории. В соответствии с кинематической моделью (4) и уравнениями желаемой траектории (1), запишем такие продольную и угловую скорость робота, которые будут обеспечивать слежение за траекторией, а именно:
vd |
= |
|
& |
2 |
& |
2 |
, |
|
|
|
|
xd |
|
yd |
|
|
|
||||
|
|
&& |
& |
|
&& |
& |
|
|
(5) |
|
|
d |
= |
yd xd |
xd yd |
. |
|
||||
|
|
|
||||||||
|
|
|
& |
2 |
& |
2 |
|
|
|
|
|
|
|
|
xd |
|
yd |
|
|
|
|
Так как xd (t), yd (t) известные достаточно гладкие функции времени, перейдем к использованию обозначений vd (t), d (t), как если бы задача ставилась изначально в
терминах этих величин. Тогда для угловых скоростей колёс робота можно записать выражения:
q21d |
= |
1 |
|
|
|
|
|
D |
|
||
r |
vd |
|
d |
|
, |
|
|||||
|
|
|
|
|
|
|
2 |
|
(6) |
||
|
|
= 1 v |
|
d D . |
|||||||
q |
22d |
d |
|
||||||||
|
|
r |
|
|
|
2 |
|
|
|||
|
|
|
|
|
|
|
|
|
|||
Обозначим невязку слежения роботом за заданной траекторией, как
94
|
|
|
|
|
|
|
e1 = q1 q1d . |
|
(7) |
||||
Для того, чтобы застабилизировать ошибку слежения в нуле, запишем выражение для |
|||||||||||||
производной по времени и назначим фиктивное управление: |
|
|
|||||||||||
|
|
|
|
|
|
& |
|
|
|
|
|
(8) |
|
|
|
|
|
|
|
e1 = q2 q2d , |
|
||||||
где q |
= col(q |
,q |
) . Назначим |
|
фиктивное управление |
q* таким образом, чтобы |
|||||||
2d |
21d |
22d |
|
|
|
|
|
|
|
|
|
|
2 |
обеспечить требуемый темп сходимости |
e |
: q* |
= K e q |
. |
|
||||||||
|
|
|
|
|
|
|
|
1 |
2 |
|
1 1 2d |
|
|
Уравнение для e1 после замыкания обратной связи должно принять вид |
|||||||||||||
|
|
|
|
|
|
& |
= K1e1 e2. |
|
(9) |
||||
|
|
|
|
|
|
e1 |
|
||||||
Чтобы обеспечить выбранный коэффициент усиления K1, устремим невязку угловой |
|||||||||||||
скорости к нулю: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
e2 = (q2 K1e1 q2d ) 0 |
|
|
||||||
Производная по времени от e2 : |
|
|
|
|
|
|
|
||||||
|
|
& |
H |
1 |
(q1)(v |
C(q1,q2)q2 G(q1) |
(t)) |
||||||
|
|
e2 = |
|
|
|||||||||
|
|
|
K |
|
2e K e |
q |
|
, |
|
(10) |
|||
|
|
|
|
1 1 |
1 2 |
3d |
|
|
|
||||
где вектор обобщенных моментов v n , dim(v) = dim(e ), должен рассматриваться как |
|||||||||||||
2
фиктивное управление.
Для обеспечения желаемой зависимости угловой скорости необходимо с помощью ДПТ устремить e2 к нулю с коэффициентами K2 (диагональная ( n n) матрица положительных элементов, выбраных таким образом, чтобы преодолеть эффект положительного слагаемого K1e2 . Вектор v необходимо устремить к желаемым значениям vd , которые записываются как
vd = Cq2 G H q3d K12e1 (K1 K2)e2 .
Уравнение замкнутой системы для e2 тогда примет вид
e&2 = K2e2 H 1(q1) (t) e3,
где e3 = v vd . Истинное управление появляется в уравнениях, полученных на последнем шаге дифференцирования e3 по времени:
e&3 = Av Dq2 Bu v&d ,
где
2
vd Cq2 Cq2 G H q3d K1 e1 K1 K2 e2
H q4d K12 ( K1e1 e2 ) (K1 K2 )( K2e2 H 1(q1) (t) e3) .
4.Синтез адаптивной процедуры& = && & ( )&
Так как основная цель работы состоит в демонстрации синтеза обратной связи для исполнительных устройств, предположим, что параметры кинематической и динамической моделей мобильного робота известны. Предположим также, что синтез фиктивной обратной связи проведен и не требует адаптивных алгоритмов, отличных от известных современных подходов. Подобные предположения не ограничивают общность рассудений, так как фиктивная обратная связь в данном случае не может иметь разрывной характер и
95
назначается стандартными методами [7-9]. Итак, рассмотрим фиктивное управление для второго блока как желаемую траекторию для исполнительных устройств, а их физические параметры в третьем уравнении системы (2) будем полагать неизвестными. Невязку
моментов (8) e3 = v vd требуется стабилизировать в нуле. Продифференцируем |
по |
|||||||
времени: |
|
|
|
|
|
|
|
|
|
& |
|
|
|
& |
|
(11) |
|
|
e3 = |
Av Dq2 Bu vd . |
|
|||||
Введём желаемый закон управления: |
|
|
|
|
|
|
|
|
|
|
|
|
ˆ |
|
|
(12) |
|
|
|
Bu = Ke3 W |
|
|
||||
где K – положительный постоянный |
коэффициент |
усиления, |
W = Av Dq2 , |
ˆ |
||||
W |
||||||||
является оценкой вектора W , и закон изменения оценки установим в виде: |
|
|||||||
|
|
& |
|
ˆ |
|
|
|
|
|
|
ˆ |
|
, |
|
(13) |
||
|
W = Q e3 |
QW |
|
|||||
где Q > 0 – матрица настроечных коэффициентов, |
является малым коэффициентом |
|||||||
настройки, и W определены как в [8]: |
|
|
|
|
|
|
||
v1 |
0 |
q21 |
0 |
vd1 |
0 |
|
|
|
= 0 |
v |
2 |
0 |
q |
0 |
v |
, |
|
|
|
|
22 |
|
d 2 |
|
||
W = A11 |
A22 |
D11 |
D22 |
B11 |
B22 . |
|
|
|
5. Модифицированная поверхность скольжения
Как было заявлено при описании задачи, управляющее воздействие должно выбираться из класса разрывных функций с постоянной амплитудой. Выбранный же в предыдущем параграфе закон управления является линейным. Это несоответствие можно обойти с помощью метода эквивалентного управления [10]. Синтез разрывной обратной связи, в соответствии с блочным принципом, разделяется на два этапа – пошаговое назначение зависимостей фиктивных управлений и выбор амплитуды разрывного управления, достаточной для реализации выбранного на первом этапе управления. При неизвестных параметрах модели одним из возможных подходов явлется адаптивная процедура оценивания этого вектора [6]. Выбором истинного управления u необходимо
обеспечить слежение за выбранными значениями |
u |
* |
|
ˆ |
|
|
= Ke3 W . Запишем уравнения |
||||
системы управления: |
|
|
|
|
|
& |
|
ˆ |
|
|
|
= Ke3 SW Bu, |
|
||||
s |
(14) |
||||
& |
|
ˆ |
|
||
ˆ |
|
, |
|
||
W |
= Q e3 QW |
|
|||
где e3 – невязка управляющих моментов. Выбрав входной сигнал в форме u = Usgn(s), с достаточно большой амплитудой U , возможно обеспечить справедливость s = 0 , тем самым реализовав предложенный алгоритм. Тогда невязка скорости e2 0 сойдётся к нулю, обеспечив соотношение e&1 = ( K1e1 e2 K1e1), которое требуется для решения
исходной задачи слежения e1(t) = e1(0)e K1t 0.
Заключение
Угол ориентации опорного колеса, если обеспечить его измерение, может быть использован для оценки радиуса кривизны траектории робота, а также для определения проскальзывания или пробуксовки. Такое свободное колесо в рассмотренной модели всего
96
лишь обеспечивает равновесие в плоскости, нормальной к оси вращения ведущих колес. Динамикой данного узла зачастую пренебрегают для упрощения рассматриваемой модели. В качестве направления дальнейших исследований и натурных испытаний можно предложить использовать измерения угла ориентации колеса при чрезмерном расхождении реальных данных и результатов численного моделирования. Многие современные исследования посвящены задачам управления группой роботов. С точки зрения данной работы, такие групповые результаты должны использоваться на этапе планирования траектории для задачи слежения, которые возможно решать с помощью описанного выше подхода. Также необходимо не только решать задачу слежения при неизвестных параметрах системы, но и обеспечить возможно подавлять воздействие сопровождающих электромеханические системы несогласованных возмущений, которые не могут быть напрямую скомпенсированы управляющими устройствами.
Библиографический список
[1]Campion G., Bastin G., Dandrea-Novel, B. "Structural properties and classification of kinematic and dynamic models of wheeled mobile robots", IEEE Transactions on Robotics and Automation, Vol. 12 No. 1, Pages 47--62, February 1996.
[2]Бурдаков С.Ф., Мирошник И.В., Стельмаков Р.Э. Системы управления движением колесных роботов. С.-Пб.: Наука, 2001.
[3]Кочетков С.А., Уткин В.А. Метод декомпозиции в задачах управления мобильными роботами // АиТ. 2011. № 10. С. 86--103
[4]Miroslav Krstic, Petar V. Kokotovic, and Ioannis Kanellakopoulos, Nonlinear and Adaptive Control Design (1st ed.). 1995, John Wiley Sons, Inc., New York, NY, USA.
[5]Дракунов С.В., Изосимов Д.Б., Лукьянов А.Г., Уткин В.А. и др. Принцип блочного управления // АиТ. Ч. I. 1990. № 5. С. 3--13; Ч. II. 1990. № 6. С. 20--31.
[6]Jing Zhou, Changyun Wen, Adaptive Backstepping Control of Uncertain Systems, Berlin: Springer, 2008.
[7]K. Shojaei, A. M. Shahri, A. Tarakameh, and B. Tabibian, «Adaptive trajectory tracking control of a differential drive wheeled mobile robot», Robotica, vol. 29, no. 3, pp. 391 - 402, 2011.
[8]Bong Seok Park, Sung Jin Yoo, Jin Bae Park, and Yoon Ho Choi, "Adaptive Tracking Control of Nonholonomic Mobile Robots Considering Actuator Dynamics: Dynamic Surface Design Approach." Proceedings of the American Control Conference, p. 3860 - 3865, 2009.
[9]C. C. Cheah, C. Liu and J. J. E. Slotine, "Adaptive Jacobian tracking control of robots with uncertainties in kinematic, dynamic and actuator models," in IEEE Transactions on Automatic Control, vol. 51, no. 6, pp. 1024-1029, 2006.
[10]Уткин В.И. Скользящие режимы в задачах оптимизации и управления. M.: Наука,
1981.
97

УДК 658.5:006.067
ФОРМАЛИЗАЦИЯ ЗАДАЧИ ОПТИМИЗАЦИИ ПРОЦЕССА ОЦЕНКИ СООТВЕТСТВИЯ ПРОДУКТА
Л.А. Роговая АО «Воронежсинтезкаучук»
В работе рассматривается постановка задачи распределения команд специалистов, участников процесса оценки соответствия продукта, обеспечивающего минимальную продолжительность выполняемых работ. При этом число специалистов различного типа, участвующих в процессе оценки соответствия продукта, ограничено.
FORMALIZATION OF THE PROBLEM OF PRODUCT CONFORMITY EVALUATION
PROCESS OPTIMIZATION
L.A. Rogovaya
JSC "Voronezhsintezkauchuk"
Тhe paper considers the problem of distribution of teams of specialists, participants in the process of assessing the product's conformity, which ensures the minimum duration of the work performed. At the same time, the number of specialists of various types involved in the process of assessing the product's conformity is limited.
Технология процесса оценки соответствия синтетических каучуков включает анализ следующих характеристик: экологическую безопасность, сопротивление качению, сцепление с дорогой, износостойкость, усталостные свойства, низкотемпературные свойства, технологическое свойства, стабильность. Оценка проводится силами многофункциональной команды специалистов. Эффективность анализа зависит от профессионального уровня, практического опыта и согласованности действий специалистов.
Задача оптимизации процесса оценки соответствия продукта заключается в построении расписаний работ, обеспечивающих минимизацию времени выполнения всех работ с учетом ограничений на ресурсы.
Базовая задача минимизации времени выполнения работ с учетом ограничений на ресурсы относится к задачам построения расписания для проекта (календарного планирования проекта).
В данной работе под проектом будем понимать совокупность взаимосвязанных действий, направленных на достижение конкретных целей. Процесс оценки соответствия продукта является примером проекта, между работами которого существует отношение предшествования.
Общую постановку задачи составления расписания выполнения работ, при котором не нарушаются отношения предшествования, ресурсные ограничения, и при этом срок окончания проекта минимальный, можно представить следующим образом.
Пусть задано множество работ N = {1,...,n}и U возобновляемых ресурсов u =1,...,U. В каждый момент времени t доступно Qu единиц ресурса u. Заданы продолжительности работ
i 0 для каждой работы i =1,...,n. Во время выполнения работы i требуется qiu Qu единиц
ресурса u =1,...,U. После завершения работы, освобожденные ресурсы в полном объеме могут быть назначены на выполнение других работ. На множестве всех работ задан
© Роговая Л.А., 2018
98
частичный порядок их выполнения: если работа i предшествует работе j, то выполнение работы j не может начаться раньше окончания работы i. Выполнение работы начинается в момент времени t =0. Прерывание работ не допускаются. Необходимо определить моменты
времени начала выполнения работ Si , i=1,...,n, так, чтобы минимизировать время выполнения всего проекта, т.е. минимизировать значение
Cmax max Ci , i
где Ci Si i .
Задачам календарного планирования проектов с учетом ограничений на ресурсы посвящен ряд работ [1-5].
Вработе [6] рассматривается задача календарного планирования с ограничениями на возобновляемые ресурсы (станки, исполнители и т.д.) и порядок выполнения работ, в работе
[7]представлены результаты решения задачи календарного планирования с не возобновляемыми ресурсами, особое внимание уделено минимизации времени задержки выполнения работ.
Задача календарного планирования проектов с учетом ограничений на складируемые ресурсы рассмотрена в работе [8].
Задача календарного планирования в управлении независимыми проектами рассмотрена в работе [9].
Вработе [10] приведена постановка задачи календарного планирования проектов, при совместном выполнении которых появляется дополнительный (синергетический) эффект, предложены точные и эвристические алгоритмы решения.
Особой сложностью отличаются задачи календарного планирования, в которых каждая работа выполняется несколькими видами ресурсов (наборами ресурсов).
В[11] предполагалось, что ресурсы Ui t выполняют работу i в определенном
соотношении, то есть Uij t ijvi t . При этом Ui t называется набором ресурсов в момент t, ij - параметры набора, vi t - мощность набора. Если vi t принимает всего два значения
0 или 1, то речь идет о выполнении работы с фиксированной интенсивностью.
Анализ работ, посвященных решению задач календарного планирования, показал, что актуальной является решение задачи формирования календарного плана работы команд, при котором продолжительность выполнения всех работ минимальна, при заданных ограничениях на число специалистов каждого вида.
Команда специалистов – это множество специалистов различного вида, непосредственно работающих над осуществлением проекта.
Рассмотрим программу из n независимых проектов. Каждый проект выполняется командой специалистов различного вида за время i , число специалистов j-го типа N j ,
j 1,m .
Набор команд характеризуется параметром ij :
|
|
ij |
N |
j |
, i |
1, n |
, |
j 1,m , |
(1) |
i Q |
|
|
|
|
|
|
|
где Q – набор команд. Замечания:
1)Набор команд может работать одновременно.
2)Допустимы перерывы в выполнении работ.
99

3) В команде присутствует не более одного специалиста каждого типа. То есть bij =1, если в наборе присутствует специалист j-го типа, bij =0 в противном случае.
Обозначим продолжительность работы j-го набора x j . Постановка задачи. Определить x x j , минимизирующие
x x j , |
(2) |
|||||||
при ограничениях x j 0 , |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
b |
x |
|
|
|
,i |
1, n |
. |
(3) |
j ij |
|
j |
|
i |
|
|
|
|
Получили задачу линейного программирования.
При этом число максимальных наборов будет значительным. Под максимальным набором будем понимать наборы, к которым нельзя добавить ни одной команды, не нарушив условия (1).
В этой связи целесообразно будет рассмотреть частные случаи, для которых существуют эффективные алгоритмы.
Рассмотрим частный случай задачи, когда максимальные наборы содержат все команды за исключением одной. Очевидно, что таких наборов n.
Примем, что i-ый набор не содержит i-ой команды. В этом случае задача принимает вид: минимизировать (2) при ограничениях xi 0, i 1,n и
x j |
i ,i |
1,n |
. |
(4) |
||
i |
|
|
|
|
|
|
Поскольку xi , то перепишем (4) в виде |
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
||||
xi |
i , i |
1,n |
. |
(5) |
||
Упорядочим наборы по убыванию i , т.е. i1 i2 ... in .
Теорема 1. Существует оптимальное решение задачи (2), (4) следующего вида:
1)в случае, если in 1 in i1 , то
|
i |
|
i |
i |
|
|
|
|
|
|
|
|
|||
x |
n1 |
n |
|
1 , |
|
x 0 , j |
2,i |
. |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
i1 |
|
|
2 |
|
|
|
|
|
i j |
|
|
|
|
n 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
i |
i |
i |
|
|
||||||
xin 1 in xi1 |
n |
|
n 1 |
|
1 |
|
|
|
|
||||||
|
|
|
|
2 |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
i |
i |
i |
|
|
|||||
x |
|
|
x |
|
|
n 1 |
n |
1 |
|
|
|||||
|
|
|
|
|
|
|
|||||||||
in 2 |
in 1 |
i1 |
|
|
|
|
2 |
|
|
|
|
|
|
||
при этом
min i1 in2 1 in .
2) в случае, если in 1 in i1 существуют несколько оптимальных решений
вида:
100