

4.3. Теоретическое исследование работы устройства для
расклинивания, выполненного на базе эксцентрикового
пальца, соединяющего шатун с ползуном
Проведение этого теоретического исследования предполагает получение расчетных зависимостей, взаимосвязывающих действующие силы с основными геометрическими параметрами устройства.
Впервые, теоретическое исследование работы эксцентрикового пальца, как элемента пресса, было изложено в работе [82]. Однако в силу специфики решаемого авторами вопроса, это исследование имеет несколько другую, по сравнению с поставленной нами задачей, направленность (все зависимости получены относительно коэффициентов трения) и носит частный характер, поскольку не охватывает все возможные варианты.
Кроме того, в расчетных схемах и, как следствие, в полученных формулах допущены неточности, которые снижают достоверность расчетов необходимых величин. Так, например, из рис. 4 и 5 работы [82] следует, что на шатуне действует сила (Р+Т), в то же время на нaгpужатель, установленный на столе пресса, передается только сила Р.
4.3.1. Анализ действующих в устройстве
для расклинивания сил и моментов
Совершенно очевидно, что эксцентриковый палец, соединяющий шатун с ползуном пресса, должен быть зафиксирован от проворота. На практике это осуществляется с помощью рычага, один конец которого жестко связан с пальцем, а другой – с телом ползуна.
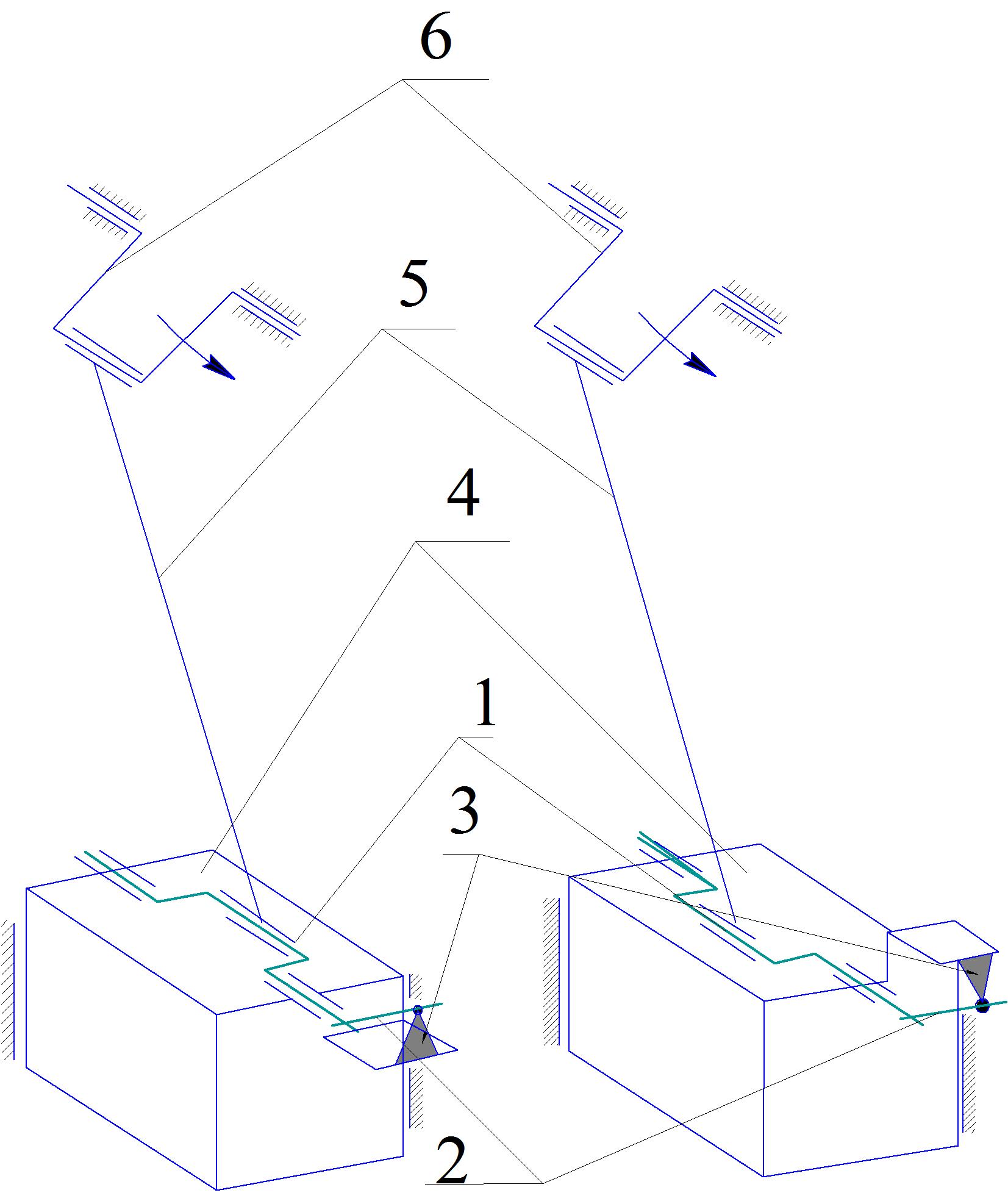
В связи с этим возможны две схемы исполнения устройства (рис. 4.18.а,б).
В первом исполнении опора рычага на ползуне и ось опор эксцентрикового пальца расположены по разные стороны от оси нижней опоры шатуна (рис. 4.18.а). Во втором – опора рычага и ось пальца расположены по одну сторону от оси нижней опоры шатуна (рис. 4.18.б).
а б
Рис. 4.18. Конструктивные схемы исполнения расклинивающего устройства при соединении шатуна пресса с ползуном через эксцентриковый палец
(1−эксцентриковый палец; 2− рычаг, жестко связанный с эксцентриковым пальцем; 3−опора рычага на ползуне; 4−ползун; 5−шатун; 6−кривошипный вал пресса)
Проанализируем силы и моменты, действующие в каждом из этих устройств в процессе нагрузки пресса и при его расклинивании.
Анализ проведем без учета отклонения шатуна от вертикали (поскольку угол отклонения при действии наибольших нагрузок на ползуне не превышает 1…1,5°) принимая допущение, что опоры эксцентрикового пальца нагружены равномерно.
4.3.1.1. Устройство первого исполнения
На рис. 4.19 приведены расчетные схемы устройства для расклинивания, выполненного в первом исполнении.
а б
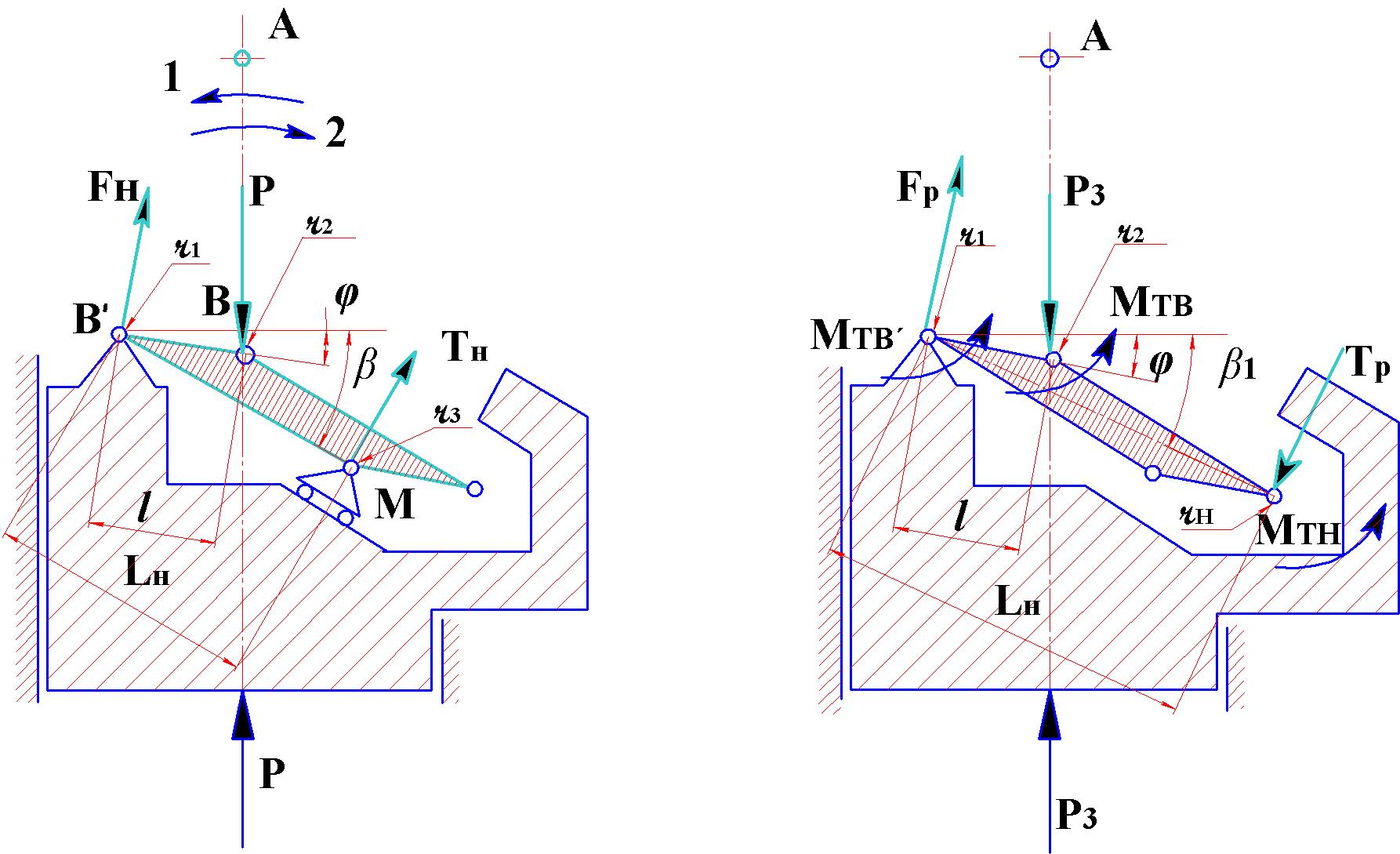
Рис. 4.19. Расчетные схемы устройства первого исполнения
Схема на рис. 4.19.а иллюстрирует действующие силы и реакции при нагрузке пресса, на рис. 4.19.б – при его расклинивании.
На рисунке приняты обозначения:
е – эксцентриситет пальца, соединяющего шатун пресса с ползуном;
r1, r2 – радиусы опор пальца в ползуне и эксцентриковой шейке;
r3, r4 – радиусы опор рычага пальца в ползуне при нагружении пресса и расклинивании;
LH, LР – длины рычага при нагружении и расклинивании пресса, равные расстоянию от осей соответствующих опор рычага до оси опор пальца в ползуне;
φ–- угол между горизонталью (в данном случае показанной, проходящей через ось пальца в ползуне) и отрезком ВВ' , соединяющим ось нижней опоры шатуна (точка В) и ось опор пальца в ползуне (точка B' );
β, β1 – углы между горизонталью и В' М и В' N;
Р, Р3 – силы, действующие на ползуне пресса при нагрузке и заклинивании;
FH, FР – реакции, возникающие в опорах эксцентрикового пальца при нагрузке и при расклинивании пресса;
ТН – реакция в опоре рычага при нагрузке;
ТР – дополнительная сила, которую необходимо приложить к рычагу при расклинивании.
Рассмотрим условия равновесия (равенства сил и моментов) для каждого конкретного случая. При этом силы будем проецировать для случаев нагружения и расклинивания на оси, совпадающие, соответственно с В'М и B'N и им перпендикулярные, а сумму моментов брать относительно оси опор пальца (эксцентрикового) в ползуне.
Если FHH и FTH есть составляющие реакции FH на ось, совпадающую с В'М и ей перпендикулярную, то для нагружения пресса указанные условия можно записать
![]() ;
(4.62)
;
(4.62)
![]() ;
(4.63)
;
(4.63)
![]() .
(4.64)
.
(4.64)
Для случая расклинивания пресса, если через FHР и FТР обозначить составляющие реакции FР на ось, совпадающую с B'N и ей перпендикулярную, то
![]() ;
(4.65)
;
(4.65)
![]() ;
(4.66)
;
(4.66)
![]() ,
(4.67)
,
(4.67)
где:
∂ и n – коэффициенты трения в подшипниках устройства при движении под нагрузкой и в момент начала расклинивания (движения и покоя).
Верхние знаки перед членами, содержащими r2, в уравнении (4.64) и в последующих формулах относятся к механизму с направлением движения шатуна по стрелке 1 (рис. 4.19.а), нижние – по стрелке 2.
После совместного
решения уравнений получим зависимость
для
![]()
![]() .
(4.68)
.
(4.68)
Формула для определения реакции FН имеет вид
![]() .
(4.69)
.
(4.69)
Для расклинивания пресса усилия ТР и FР определяются по формулам:
![]() ;
(4.70)
;
(4.70)
![]() ,
(4.71)
,
(4.71)
где:
 ;
(4.72)
;
(4.72)
 .
(4.73)
.
(4.73)
Для частного случая, когда φ=β=β1=0, полученные расчётные зависимости значительно упрощаются и имеют вид:
а) для заклинивания пресса:
![]() ;
(4.74)
;
(4.74)
![]() .
(4.75)
.
(4.75)
б) для расклинивания пресса:
![]() ;
(4.76)
;
(4.76)
 ,
(4.77)
,
(4.77)
где:
![]() ,
,
![]() ,
,
![]() ,
,
![]() соответствуют силам ТН
, FН,
ТР
и FР
для данного частного случая исполнения
устройства (т.е. для φ=β=β1=0).
соответствуют силам ТН
, FН,
ТР
и FР
для данного частного случая исполнения
устройства (т.е. для φ=β=β1=0).