4.5. Регуляторы с исполнительным механизмом постоянной скорости
4.5.1. Пропорциональный регулятор
Структурная
схема пропорционального регулятора с
интегрирующим исполнительным механизмом
(ИМ) представляет собой последовательное
соединение усилительного и интегрирующего
звеньев, охваченных отрицательной
обратной связью. Передаточная функция
регулятора равна произведению передаточной
функции пропорционального звена
(П-регулятора) и передаточной функции
балластного звена. При большом коэффициенте
усиления в прямой цепи балластным звеном
можно пренебречь и передаточная функция
регулятора определяется коэффициентом
передачи звена обратной связи.. При
использовании в цепи обратной связи
пропорционального звена с передаточной
функцией
![]() передаточная функция всего регулятора
равна
передаточная функция всего регулятора
равна
![]() .
Сигнал обратной связи по положению ИМ
обычно снимается с его реостатного
датчика.
.
Сигнал обратной связи по положению ИМ
обычно снимается с его реостатного
датчика.
Исполнительный
механизм постоянной скорости представим
в виде последовательного соединения
трехпозиционного релейного элемента
и интегрирующего исполнительного
механизма с передаточной функцией
![]() ,
где Т- время полного перемещения
исполнительного механизма на один
оборот.
,
где Т- время полного перемещения
исполнительного механизма на один
оборот.
Рассматривая
релейный элемент как усилительное звено
с очень высоким коэффициентом усиления
(в рамках метода гармонической
линеаризации) пропорциональный регулятор
с ИМ постоянной скорости представить
в виде последовательно соединенных
трехпозиционного релейного элемента
и исполнительного механизма постоянной
скорости охваченных отрицательной
обратной связью (Рис.4.34). Выходной сигнал
трехпозиционного регулятора U
принимает три значения: 0,
U0
и поступает на пускатель ИМ.
![]() должен быть достаточен для управления
пускателем, а направление перемещения
определяется знаком напряжения. На
рис.4.34 обозначено: Н-
зона нечувствительности, В
-
зона
возврата.
должен быть достаточен для управления
пускателем, а направление перемещения
определяется знаком напряжения. На
рис.4.34 обозначено: Н-
зона нечувствительности, В
-
зона
возврата.
Рассмотрим
работу регулятора. Пусть в начальный
момент времени сигнал рассогласования
0,
равный
разности сигналов задатчика VЗ
и датчика измеряемого параметра VД,
равен сигналу обратной связи с выхода
датчика положения ИМ 0.
Сигнал на входе релейного элемента
![]() .
Сигнал на выходе релейного элемента
также равен 0 и ИМ стоит.
.
Сигнал на выходе релейного элемента
также равен 0 и ИМ стоит.
П ри
подаче на вход регулятора сигнала
рассогласования
сигнал на входе нелинейного элемента
равен
ри
подаче на вход регулятора сигнала
рассогласования
сигнал на входе нелинейного элемента
равен![]() .
При входном сигнале
вызвавшем
изменение
так, что
.
При входном сигнале
вызвавшем
изменение
так, что
![]() , трехпозиционный элемент сработает и
включится исполнительный механизм. ИМ
перемещает регулирующий орган в сторону
увеличения выходного сигнала
и уменьшения .
ИМ будет работать до тех пор, пока не
станет
, трехпозиционный элемент сработает и
включится исполнительный механизм. ИМ
перемещает регулирующий орган в сторону
увеличения выходного сигнала
и уменьшения .
ИМ будет работать до тех пор, пока не
станет
![]() .
При выполнении этого условия ИМ
отключится. Таким образом, при каждом
изменении сигнала рассогласования,
когда
,
ИМ ликвидирует отклонение регулируемой
величины
от задания с точностью
.
При выполнении этого условия ИМ
отключится. Таким образом, при каждом
изменении сигнала рассогласования,
когда
,
ИМ ликвидирует отклонение регулируемой
величины
от задания с точностью
![]() .
В установившемся состоянии
.
В установившемся состоянии
![]() .
Так как обычно зона нечувствительности
мала, то можно записать
.
Так как обычно зона нечувствительности
мала, то можно записать
![]() или, используя преобразование Лапласа,
E(p)=
или, используя преобразование Лапласа,
E(p)=![]() *M(p).
Передаточная функция регулятора равна
*M(p).
Передаточная функция регулятора равна
![]() .
.
4.5.2. Пропорционально-интегральный регулятор
Для
реализации ПИ-закона регулирования с
исполнительным механизмом постоянной
скорости используется схема с
трехпозиционным нелинейным (релейным)
элементом, охваченным отрицательной
обратной связью через инерционное звено
первого порядка. Отрицательная обратная
связь по положению исполнительного
механизма не используется. Выходной
сигнал трехпозиционного регулятора
принимает три значения: 0,
U0,
определяющие перемещение ИМ (Рис.4.35).
На рис.4.35 обозначено: порог срабатывания,
![]() -
порог возврата,
-
порог возврата,
![]() -зона
нечувствительности,
-зона
нечувствительности,
![]() и
и
![]() -
зоны возврата.
-
зоны возврата.
Выходной
сигнал релейного элемента поступает
на вход управления ИМ, который включается
в структуру регулятора. Цепь обратной
связи представляет собой инерционное
звено первого порядка, реализованное
в виде эквивалентной RC
цепи имеющей, в общем случае, различные
постоянные времени заряда Тзар
и р азряда
Траз
конденсатора. В общем случае схема
регулятора имеет вид, представленный
на рис. 4.36. Сравните с рис. 4.34. Рассмотрим
реакцию регулятора на ступенчатый
входной сигнал.
азряда
Траз
конденсатора. В общем случае схема
регулятора имеет вид, представленный
на рис. 4.36. Сравните с рис. 4.34. Рассмотрим
реакцию регулятора на ступенчатый
входной сигнал.
П усть
в исходном состоянии сигнал рассогласования
=0,
сигнал обратной связи с выхода
инерционного звена
усть
в исходном состоянии сигнал рассогласования
=0,
сигнал обратной связи с выхода
инерционного звена
![]() =0,
сигнал на входе релейного элемента
=0,
сигнал на входе релейного элемента
![]() =0,
U=0
и исполнительный механизм стоит.
=0,
U=0
и исполнительный механизм стоит.
При
подаче на вход регулятора ступенчатого
воздействия
![]() трехпозиционный элемент срабатывает
и на его выходе появляется сигнал U=U0
под воздействием которого включается
ИМ. В начальный момент времени
=0
и далее начинает возрастать по экспоненте,
стремясь к KU0
(рис.4.2.). Сигнал обратной связи
возрастает по экспоненте, а
трехпозиционный элемент срабатывает
и на его выходе появляется сигнал U=U0
под воздействием которого включается
ИМ. В начальный момент времени
=0
и далее начинает возрастать по экспоненте,
стремясь к KU0
(рис.4.2.). Сигнал обратной связи
возрастает по экспоненте, а
![]() по экспоненте уменьшается. Начальная
скорость изменения
называется скоростью связи Vсв
, которая равна Vсв=
по экспоненте уменьшается. Начальная
скорость изменения
называется скоростью связи Vсв
, которая равна Vсв=![]() =KU0/Tзар.
=KU0/Tзар.
При
<![]() /2-
/2-![]() трехпозиционный элемент переходит в
нейтральное состояние. Тогда UВЫХ=0
и ИМ отключается. Длительность первого
импульса t1,
учитывая малость
трехпозиционный элемент переходит в
нейтральное состояние. Тогда UВЫХ=0
и ИМ отключается. Длительность первого
импульса t1,
учитывая малость
![]() и
,
равна t1=
0/Vсв.
Первый импульс реализует пропорциональную
составляющую выходного сигнала
регулятора. За время первого импульса
ИМ переместится на величину угла
и
,
равна t1=
0/Vсв.
Первый импульс реализует пропорциональную
составляющую выходного сигнала
регулятора. За время первого импульса
ИМ переместится на величину угла
![]() ,
где VИМ
– скорость перемещения исполнительного
механизма.
,
где VИМ
– скорость перемещения исполнительного
механизма.
После
того, как трехпозиционный регулятор
вернулся в нейтральное состояние, сигнал
обратной связи
начинает
уменьшаться по экспоненте, а суммарный
сигнал
на входе нелинейного элемента начинает
по экспоненте увеличиваться и при
>
/2
трехпозиционный элемент снова сработает.
При появлении сигнала U=U0
исполнительный механизм снова включится.
При этом начнет возрастать сигнал
обратной связи
,
а следовательно уменьшаться
.
Когда
станет меньше
/2-![]() трехпозиционный элемент возвратится
в нейтральное состояние и ИМ отключится.
Таким образом, возникает автоколебательный
режим с длительностью импульса
трехпозиционный элемент возвратится
в нейтральное состояние и ИМ отключится.
Таким образом, возникает автоколебательный
режим с длительностью импульса
![]() и длительностью паузы
и длительностью паузы
![]() .
В результате интегрирования исполнительным
механизмом этой последовательности
формируется интегральная составляющая
звена (регулятора). Длительность
последующих импульсов и пауз зависит
от величины зоны возврата
.
В результате интегрирования исполнительным
механизмом этой последовательности
формируется интегральная составляющая
звена (регулятора). Длительность
последующих импульсов и пауз зависит
от величины зоны возврата
![]() ,
от значения сигнала рассогласования
и от параметров звена обратной связи.
,
от значения сигнала рассогласования
и от параметров звена обратной связи.
Получим
передаточную функцию ПИ-регулятора.
Вычислим Коэффициент передачи. Как было
показано, перемещение ИМ за время первого
импульса, реализующего пропорциональную
составляющую выходного сигнала равно
.
Тогда коэффициент передачи равен
 .
Заметим, что часто входной сигнал
задается (указывается) не в вольтах , а
в процентах от 100-процентного сигнала,
величина которого указывается в
паспортных данных регулятора. Скорость
связи также часто задается в
.
Заметим, что часто входной сигнал
задается (указывается) не в вольтах , а
в процентах от 100-процентного сигнала,
величина которого указывается в
паспортных данных регулятора. Скорость
связи также часто задается в
![]() .
Если перемещение также измерять в
процентах от максимального (полного
перемещения), то скорость будет иметь
размерность
и коэффициент передачи будет безразмерной
величиной равной
.
Если перемещение также измерять в
процентах от максимального (полного
перемещения), то скорость будет иметь
размерность
и коэффициент передачи будет безразмерной
величиной равной
 , где ТИМ
– время полного перемещения исполнительного
механизма.
, где ТИМ
– время полного перемещения исполнительного
механизма.
Рассчитаем
интегральную составляющую. Длительность
последующих импульсов определяется
временем заряда эквивалентного
конденсатора на величину В
и равна
 ,
так как VСВ
определяет скорость заряда. Рассчитаем
длительность пауз. При реализации
интегральной составляющей напряжение
на конденсаторе приблизительно равно
0
и поэтому скорость разряда, определяющая
длительность паузы равна
,
так как VСВ
определяет скорость заряда. Рассчитаем
длительность пауз. При реализации
интегральной составляющей напряжение
на конденсаторе приблизительно равно
0
и поэтому скорость разряда, определяющая
длительность паузы равна
![]() ,
где ТРАЗ
– постоянная времени цепи разряда
конденсатора. Тогда длительность пауз
равна
,
где ТРАЗ
– постоянная времени цепи разряда
конденсатора. Тогда длительность пауз
равна
![]() .
Тогда средняя скорость перемещения ИМ
VСР
будет равна
.
Тогда средняя скорость перемещения ИМ
VСР
будет равна
![]() .
Поскольку длительность импульса
значительно меньше длительности паузы,
то
.
Поскольку длительность импульса
значительно меньше длительности паузы,
то
![]() .
.
Перемещение
ИМ
![]() и отношение перемещения к входному
сигналу равно
и отношение перемещения к входному
сигналу равно
![]() .
Суммирую пропорциональную и интегральную
составляющие перемещения и выполняя
преобразование Лапласа получим
передаточную функцию ПИ-регулятора
.
Суммирую пропорциональную и интегральную
составляющие перемещения и выполняя
преобразование Лапласа получим
передаточную функцию ПИ-регулятора
 .
ТРАЗ
является временем изодрома.
.
ТРАЗ
является временем изодрома.
Таким образом, коэффициент передачи определяется скоростью обратной связи, постоянная времени интегрирования – постоянной цепи разряда конденсатора. При постоянном коэффициенте передачи длительность импульсов определяется (регулируется) шириной зоны возврата. Длительность пауз при постоянных И и К0 обратно пропорциональна входному сигналу.
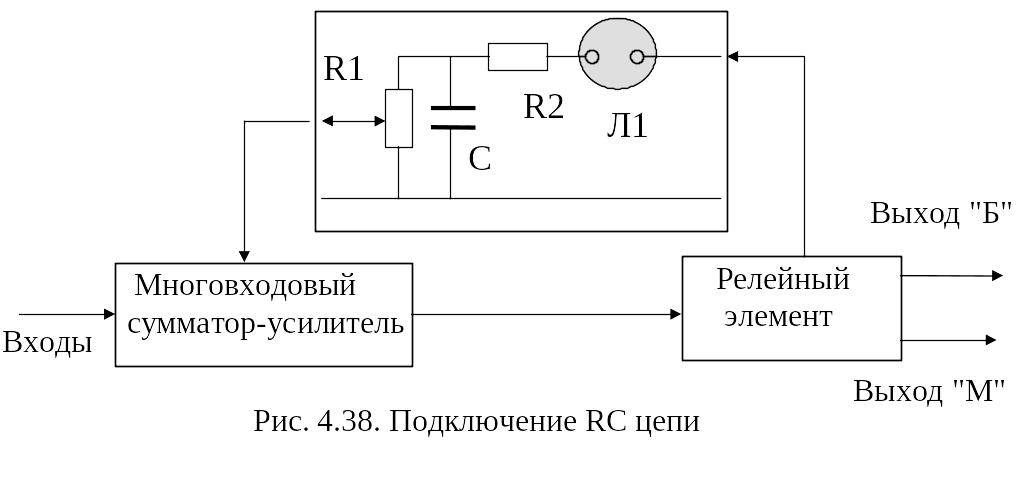
На практике в регуляторах фактически используются два звена обратной связи. Одно звено работает при включении трехпозиционного элемента, другое - при отключении. Для этой цели в некоторых промышленных регуляторах используется подключение RC цепи через неоновую лампочку как показано на рис. 4.38. Поскольку выходной сигнал релейного элемента имеет величину большую напряжения зажигания неоновой лампы заряд конденсатора идет через сопротивление R2, а разряд - через сопротивление R1.