

УДК 533.6.013
ОСОБЕННОСТИ ПОСТРОЕНИЯ АДАПТИВНЫХ СИСТЕМ УПРАВЛЕНИЯ СОВРЕМЕННЫХ САМОЛЕТОВ
С ЭТАЛОННОЙ МОДЕЛЬЮ
Разуваев Д.В., старший преподаватель Военный учебно-научный центр ВВС «Военно-воздушная академия»
В статье рассматриваются вопросы особенностей построения адаптивных систем управления самолетов. Представлены схемы возможных моделей таких систем управления.
Ключевые слова: система управления, адаптивная модель, идентификатор, корректирующий сигнал.
В терминах теории управления самолет следует считать объектом управления, а систему управления самолетом - регулятором. В том случае, если удается обеспечить изменение параметров регулятора или его структуры так, чтобы поведение объекта управления перестало зависеть от внешних условий и характеристик самого объекта управления, то говорят об адаптивности системы управления. Другими словами, адаптивная система управления так подстраивается под свойства объекта управления и иные влияющие на процесс управления внешние факторы, что поведение объекта управления всегда остается благоприятным или близким к таковому.
По характеру изменений, происходящих в адаптивных системах управления, они могут быть самонастраивающимися или самоорганизующимися. В самонастраивающихся системах изменяются только значения их параметров, при этом структура остается неизменной. В самоорганизующихся системах изменяется их структура. На самолетах Су-30СМ, Су-35, Як-130 нашли применение самонастраивающиеся адаптивные системы в продольном канале управления.
В зависимости от того, происходит ли оценка характеристик объекта управления или нет, адаптивные систем управления подразделяются на системы с эталонной моделью и системы с идентификатором (с настраиваемой моделью).
Системы с эталонной моделью содержат модель идеального поведения объекта управления, выраженную в аналитическом виде и
387
обеспечивают такую подстройку своих параметров, чтобы приблизить поведение объекта к поведению эталонной модели. Адаптивная система управления с эталонной моделью применена в продольном канале самолета Су-30СМ.
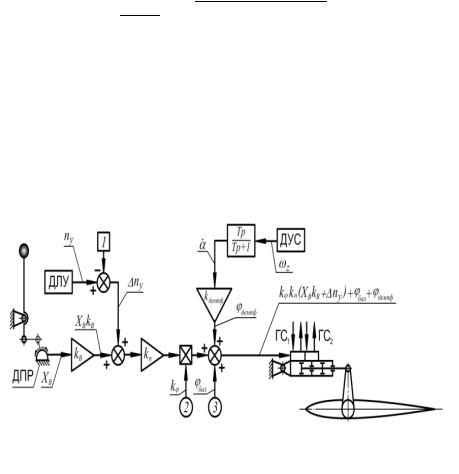
В системах с идентификатором (с настраиваемой моделью) формируется априорная структура аналитической модели, описывающей поведение объекта управления (рисунок 1).
При этом предполагается, что если параметры этой модели будут соответствовать характеристикам объекта управления, то модель будет достоверно описывать его поведение. Процесс формирования адаптивного управления заключается в том, чтобы идентифицировать (получить оценки) характеристик объекта управления, присвоить их аналитической модели (настроить модель) и аналитическим путем построить такой закон управления моделью, который будет соответствовать требованиям к характеристикам устойчивости и управляемости объекта управления.
Адаптивные системы управления с идентификатором (настраиваемой моделью) применены в системах продольного управления самолетов Су-35 и Як-130.
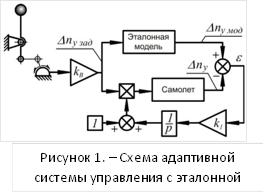
В весьма упрощенном виде, принципиальная схема адаптивной системы управления с эталонной моделью представлена на рисунке 1. В такой схеме летчик, отклоняя РУС по тангажу, формирует сигнал
заданной избыточной перегрузки ∆ny зад = X ВkВ . Этот сигнал
388
подается в контур управления стабилизатором самолета и на вход в эталонную модель, которая описывается передаточной функцией
W∆ny мод (p)= 0,0169p2 1+ 0,26p +1 .
∆ny зад
Задача адаптивной системы управления заключается том, чтобы приблизить поведение самолета к поведению эталонной модели, т.е. приблизить характер изменения избыточной нормальной перегрузки
∆ny (t) |
к эталонной∆ny мод(t). При возникновении ошибки, |
которую |
можно |
представить в видеε = ∆ny мод −∆ny , формируется |
сигнал |
(корректирующий сигнал) на её устранение. Устранение ошибки (т.е. ε =0) возможно когда∆ny мод()t = ∆ny ()t , т.е. поведение самолета соответствует поведению эталонной модели.
Рисунок 2 – Схема адаптивной системы управления с
идентификатором (настраиваемой моделью)
При работе системы необходимо учитывать и скорость изменения корректирующего сигнала, однако его величина не должна превышать некоторых значений, т.к. слишком большая его величина может привести к появлению неустойчивости контура «адаптивная система управления - самолет».
389
Согласно этой логике управления маневренными самолетами в продольном канале, реализованную в современных системах дистанционного управления, основной сигнал управления, подаваемый на электрогидравлический рулевой привод управления
стабилизатором ϕл , представляет собой комбинацию из |
трех |
сигналов: |
|
ϕл = kn (X BkB + ∆ny +αkα ), |
(1) |
где X ВkВ - сигнал, пропорциональный перемещению |
РУС; |
kВ, [1 мм] - коэффициент, преобразующий сигнал перемещения РУС в единицы измерения перегрузки; ∆ny = ny −1 сигнал текущей
мм] - коэффициент, преобразующий сигнал перемещения РУС в единицы измерения перегрузки; ∆ny = ny −1 сигнал текущей
избыточной перегрузки; αkα - сигнал, пропорциональный текущему углу атаки; kα , [1 град] - коэффициент, преобразующий сигнал в
град] - коэффициент, преобразующий сигнал в
градусной мере угла атаки в единицы измерения перегрузки; kn ,
[град] - коэффициент, преобразующий в градусную меру отклонения стабилизатора безразмерный сигнал перегрузки.
Из выражения (1) следует, что сигнал на отклонение стабилизатора ϕл появляется тогда, когда сумма сигналов,
пропорциональных текущим значениям избыточной перегрузки и угла атаки, не соответствует положению РУС по тангажу. Сигнал по углу атаки играет решающую роль при малых скоростных напорах, когда величина перегрузки незначительна и не является информативным параметром, по которому возможно построить управление. В таких случаях следует полагать, что летчик, отклоняя РУС по тангажу, формирует сигнал, пропорциональный заданному углу атаки. При
увеличении скоростного напора коэффициент kα уменьшается и
летчик, отклоняя РУС, формирует сигнал заданной избыточной перегрузки.
Кроме всего прочего необходимо учитывать моменты, вызванные отклонением стабилизатора, моменты продольной статической устойчивости, демпфирующий момент, момент от запаздывания скоса потока, момент при нулевой подъемной силе и т.д. Принимая во внимание только основные аэродинамические моменты, условие балансировки самолета можно представить в виде:
390
ϕбал = − M z0 + M αz α + M ωz z ωz + M αz α .
M ϕz
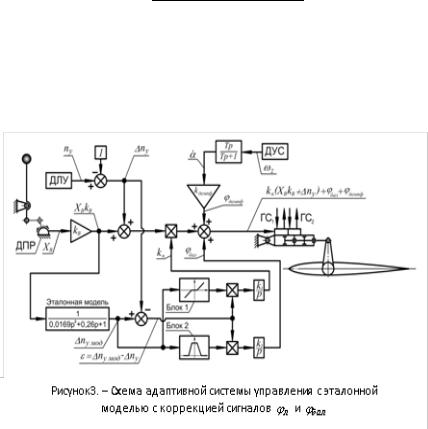
После мероприятий по улучшению качества переходного процесса по углу атаки на неустановившихся режимах на электрогидравлический рулевой привод будет поступать сигнал
ϕ =ϕл +ϕбал +ϕдемпф (сигнал от летчика, балансировочный сигнал и сигнал демпфера).
В результате работы адаптивного алгоритма обеспечивается коррекция сигналов ϕл и ϕбал , при этом сигнал демпфера ϕдемпф корректируется за счет изменения коэффициента усиления kдемпф в
зависимости от режима полета и конфигурации самолета и адаптивными свойствами не обладает.
Схема адаптивной системы управления с эталонной моделью, с коррекцией сигналов ϕл и ϕбал , представлена на рис. 3 (сигнал αkα в целях упрощения анализа схемы опущен).
391
Литература
1. Системы управления летательных аппаратов: учебник для курсантов и слушателей вузов ВВС/ Под ред. В.В.Воробьева. – М.: Изд. ВВИА им. проф. Н.Е.Жуковского, 2008. – 203 с.
2. Киселев А.М. Система управления самолета МиГ-29: учебное пособие / А.М.Киселев – М.: Изд. ВВИА им. проф. Н.Е.Жуковского, 2004. – 99 с.
3. Радченко М.И. Дискретная математическая модель летчика, управляющего самолетом: научно-методические материалы / М.И.Радченко - М.: Изд. ВВИА им. проф. Н.Е.Жуковского, 2006. – 80 с.
Military training and research center of the air force "Air force Academy"
FEATURES OF CONSTRUCTION OF ADAPTIVE CONTROL SYSTEMS OF MODERN PLANES WITH REFERENCE MODEL
Razuvaev D. V.
In article questions of features of construction of adaptive control systems of planes are considered. Schemes of possible models of such control systems are presented.
Key words: a control system, adaptive model, the identifier correcting a signal.
УДК 629.7.05
АЛГОРИТМ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ НА
ОСНОВЕ ОПТИКО-ЭЛЕКТРОННОЙ СИСТЕМЫ И ЭЛЕКТРОННОЙ КАРТЫ МЕСТНОСТИ
А.В. Сизов, адъюнкт; С.В. Ипполитов, канд. техн. наук; А.Ю. Савченко, канд. техн. наук
Военный учебно-научный центр ВВС «Военно-воздушная академия»
Разработан алгоритм коррекции бесплатформенной инерциальной навигационной системы реализующий способ определения координат местоположения беспилотного летательного аппарата на основе оптико-электронной системы и электронной карты местности.
392
Современные беспилотные летательные аппараты (БЛА) оборудуются навигационными комплексами, включающими в себя датчики навигационной информации, использующие различные методы навигации: бесплатформенные инерциальные навигационные системы (БИНС), спутниковые навигационные системы (СНС), радиотехнические системы ближней (дальней) навигации (РСБН, РСДН), корреляционно-экстремальные навигационные системы. Основным источником навигационной информации, как правило, является БИНС, поскольку ей присущи такие достоинства, как максимальная автономность (определение навигационных параметров без наличия внешних ориентиров, поступающих извне сигналов или каких-либо излучений), скрытность работы и возможность полной автоматизации всех процессов навигации, помехозащищенность. Однако при использовании данных систем происходит накопление ошибок определения координат, которые необходимо компенсировать. В связи с этим возникает необходимость проведения коррекции БИНС дополнительными навигационными системами, использующими внешнюю по отношению к БЛА информацию (СНС, РСБН и прочие). Применение данных систем для коррекции БИНС связано с рядом проблем, таких как потери полезного сигнала от средств радио-коррекции, вызванных противодействием противника, отсутствием радиолокационного поля и др. Поэтому актуальной является задача разработки автономных систем определения координат местоположения БЛА для коррекции БИНС.
Предлагается новый способ коррекции БИНС на основе оптикоэлектронной системы (ОЭС) и электронной карты местности (ЭКМ). Суть его заключается в следующем. Коррекция текущих координат местоположения БЛА осуществляется за счет двух видов данных – географических координат трех известных ориентиров (идентичных точек) на местности и координат положения БЛА относительно данных ориентиров (относительные координаты – дальность, высота и боковое отклонение).
Географические координаты трех идентичных точек необходимы для расчета географических координат базового ориентира (D). Относительные координаты отсчитываются от базового ориентира в географической системе координат. Но расчет их осуществляется на
393
основе расчетных значений координат идентичных точек и базового ориентира в связанной системе координат БЛА.
Определение географических координат трех идентичных точек производится в ЭКМ на основе распознавания полученного ОЭС изображения.
Расчет относительных координат БЛА осуществляется методом треугольника с описанной (вписанной) окружностью (сферой), вершинами которого являются три идентичные точки, с определением их координат в связанной системе координат БЛА в результате соответствующей обработки изображения ОЭС.
Базовый ориентир (D) – это расчетная точка, полученная как центр вписанной (описанной) окружности (сферы) в треугольник, образованный в связанной системе координат БЛА тремя идентичными точками и выполняет две функции: в связанной системе координат БЛА необходим для расчета относительных координат, а в географической системе координат – для определения точки на местности, относительно которой ведется отсчет.
Алгоритм реализации данного способа представлен на рисунке 1. Определение текущих координат БЛА происходит по сигналам БИНС (X,Y,Z). Затем эти координаты с учётом погрешности (∆X,∆Y,∆Z), накопленной после последней коррекции или выставки БИНС, вводятся в ЭКМ. Таким образом, определяются границы рабочей области ЭКМ (X+∆X,Y+∆Y,Z+∆Z).
394
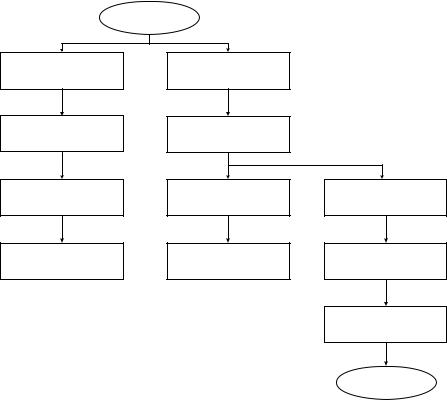
 координатидентичных точеквЭКМ
координатидентичных точеквЭКМ 