

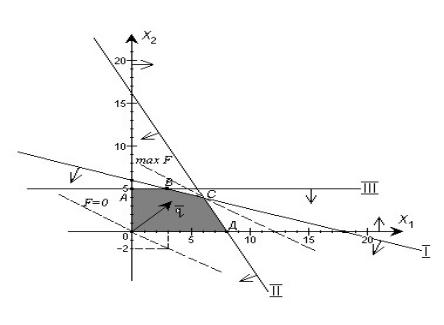
Рис. 1.
3. Нахождение решения задачи линейного программирования
Для решения ЗЛП существует универсальный метод– метод последовательного улучшения плана или симплекс-метод, который состоит из двух вычислительных процедур: сим- плекс-метода с естественным базисом и симплекс-метода с искусственным базисом(М- метод).
Выбор конкретной вычислительной процедуры осуществляется после приведения -ис ходной ЗЛП к каноническому виду.
Для применения симплекс-метода с естественным базисом ЗЛП должна содержать единичную подматрицу размером mxm – в этом случае очевиден начальный опорный план.
Исследование опорного плана на оптимальность, а также дальнейший вычислительный процесс удобнее вести, если условия задачи и первоначальные данные записать в таблицу:
Базис |
б С |
Р0 |
с1 |
с2 |
... |
сm |
cm+1 |
... |
cn |
|
Р1 |
Р2 |
... |
Рm |
Рm+1 |
... |
Рn |
||||
|
|
|
||||||||
Р1 |
с1 |
b1 |
1 |
0 |
... |
0 |
a1m+1 |
... |
a1n |
|
Р2 |
с2 |
b2 |
0 |
1 |
... |
0 |
a2m+1 |
... |
a2n |
|
... |
... |
... |
... |
... |
|
... |
... |
... |
|
|
Рm |
сm |
bm |
0 |
0 |
... |
1 |
amm+1 |
... |
amn |
|
|
|
F0 |
0 |
0 |
|
0 |
m+1 |
|
n |
В первом столбце таблицы"Базис" записывают базисные векторы данного опорного плана. Во втором столбце - коэффициенты целевой функции (с1, с2,…, сm) при базисных переменных (напомним, что в базис входят только векторы, образующую единичную подматрицу). В третьем столбце Р0 - правая часть ограничений задачи (базисные компоненты плана). Таким образом, перемножая элементы второго столбца таблицы со столбцом Р0, и суммируя эти произведения, мы получаем значение целевой функции(F0=с1*b1 + с2*b2+…+
сm*bm).
Первая строка симплексной таблицы содержит коэффициенты целевой функции нашей задачи и остается неизменной на протяжении всего решения (с1, с2,…, сm).
В центральной части таблицы записывают коэффициенты при неизвестных в ограничениях исходной задачи. При этом следует заметить, что коэффициенты при базисных пере-
5
менных в ограничениях задачи составляют единичную подматрицу. Последнюю оценочную
m
строку рассчитывают по формуле D j = åci aij - c j .
i=1
После заполнения таблицы исходный опорный план проверяют на оптимальность. Для
этого просматривают элементы последней (оценочной) строки. Возможны три варианта: |
|
|
1. |
Все оценки D j ³ 0 , значит на основании признака оптимальности получен |
опти- |
мальный план. |
|
|
2. |
D j < 0 для некоторого j, и все соответствующие этому индексу величиныaij |
£ 0 , |
значит целевая функция не ограничена сверху на множестве планов. |
|
|
3. |
D j < 0 для некоторых индексов j, и для каждого такого j по крайней мере одно из |
|
чисел aij |
> 0 , значит можно перейти к новому опорному плану, при котором значение целе- |
|
вой функции увеличится. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Переход от одного опорного плана к другому осуществляется исключением из исходно- |
|
|||||||||||||
го базиса какого-нибудь из векторов и введением в него нового вектора. В качестве вводимо- |
|
|||||||||||||
го в базис вектора берётся один из векторов, для которых D j < 0 . Пусть это будет вектор Рk. |
|
|||||||||||||
Для |
определения |
вектора, подлежащего |
исключению |
из |
базиса |
находят |
||||||||
q = min(bi |
/ aik ), aik > 0, i =1,2,K, m . Тогда выполняется условие неотрицательности значений |
|
||||||||||||
опорного плана. Пусть этот минимум достигается при i=r. Тогда из базиса исключают вектор |
|
|||||||||||||
Рr, а число ark называют разрешающим элементом. |
|
|
|
|
|
|||||||||
Элементы новой симплекс-таблицы получают методом Жордана-Гаусса по формулам: |
|
|||||||||||||
|
|
a1rj |
= arj |
/ ark , j = 1,2,Kn для i = r; |
|
|
|
|||||||
|
|
aij1 |
= aij |
- (arj |
/ ark )aik ) при i ¹ r . |
|
|
|
||||||
Значения нового опорного плана рассчитываются по формулам: |
|
|
|
|||||||||||
|
|
|
br1 |
= br |
/ ark |
для i = r; |
|
|
|
|
||||
|
|
b1 = b |
- (b |
r |
/ a |
rk |
)a |
ik |
при i ¹ r . |
|
|
|
||
|
|
i |
i |
|
|
|
|
|
|
|
|
|||
Процесс решения продолжают либо до получения оптимального плана, либо до уста- |
|
|||||||||||||
новления неограниченности целевой функции. Если среди оценок оптимального плана нуле- |
|
|||||||||||||
вые только оценки, соответствующие базисным векторам, то это говорит о единственности |
|
|||||||||||||
оптимального плана. Если же нулевая оценка соответствует вектору, не входящему в базис, |
|
|||||||||||||
то в общем случае это означает, что оптимальный план не единственный. |
|
|
|
|||||||||||
Если единичной подматрицы не обнаруживается, то либо придется перебирать все под- |
|
|||||||||||||
системы m уравнений с m неизвестными в надежде обнаружить неотрицательные решения, |
|
|||||||||||||
либо прибегнуть к методу искусственного базиса. |
|
|
|
|
|
|||||||||
Метод искусственного базиса заключается в том, |
что для получения единичной под- |
|
||||||||||||
матрицы коэффициентов мы вводим в исходную задачу неотрицательные так называемые искусственные переменные и включаем их в целевую функцию с коэффициентом+М для задачи минимизации и с коэффициентом-М для задачи максимизации, где М>0 - сколь угодно большое число. Полученная задача называется расширенной по отношению к исходной. Искусственные переменные образуют начальное базисное решение. Применив сим- плекс-метод, необходимо вывести из базиса все искусственные переменные. Если удается доказать (или показать), что искусственные переменные полностью вывести из базиса -не возможно, то это означает, что задача не имеет решения, то есть ее ограничения противоречивы.
Если на текущей итерации из базиса выводится искусственная переменная, то в следующей симплекс-таблице соответствующий ей столбец можно удалить, в дальнейших итерациях он не будет участвовать.
6
4.Двойственность в задачах линейного программирования
Скаждой задачей линейного программирования тесно связана другая линейная задача, называемая двойственной; первоначальная задача называется исходной или прямой.
Исходная задача |
Двойственная задача |
||||||||
|
n |
|
m |
||||||
f (x1 , x2 ,..., xn ) = åc j x j ® max |
g( y1 , y2 ,..., ym ) = åbi yi ® min |
||||||||
j =1 |
|
i=1 |
|||||||
n |
m |
|
|
||||||
åaij x j £ bi , i = |
1, m |
, |
åaij yi ³ c j , j = 1, n, |
||||||
j =1 |
i=1 |
|
|
||||||
|
|||||||||
x j ³ 0, j = |
1, n |
. |
yi ³ 0, i = 1, m. |
||||||
|
|
|
|
|
|
|
|
|
|
Две приведенные задачи образуют двойственную пару.
Двойственная задача по отношению к исходной составляется согласно следующим правилам:
1) целевая функция исходной задачи формулируется на максимум, а целевая функция двойственной задачи — на минимум, при этом в задаче на максимум все неравенства в функциональных ограничениях имеют вид "£", в задаче на минимум — вид "³";
2)матрица А, составленная из коэффициентов при неизвестных в системе ограничений исходной задачи и аналогичная матрица Ат в двойственной задаче получаются друг из друга транспонированием;
3)число переменных в двойственной задаче равно числу функциональных ограничений исходной задачи, а число ограничений в системе двойственной задачи— числу переменных
висходной задаче;
4)коэффициентами при неизвестных в целевой функции двойственной задачи являются свободные члены в системе ограничений исходной задачи, а правыми частями в ограни-
чениях двойственной задачи — коэффициенты при неизвестных в целевой функции исходной задачи;
5) если переменная xj исходной задачи может принимать только положительные значения, то j-ое условие в системе ограничений двойственной задачи является неравенством вида "≥". Если же переменная может принимать как положительные, так и отрицательные значения, то j-ое условие представляет собой уравнение. И наоборот, если i-ое соотношение в системе ограничений исходной задачи является неравенством, то i-ая переменная двойственной задачи yi. В противном случае переменная yi может принимать как положительные, так и отрицательные значения.
7
В теории двойственности используются четыре пары двойственных задач (приведем их в
матричной форме записи): |
|
|
||
|
Исходная задача |
Двойственная задача |
||
|
F ( X ) = CX ® max, |
Симметричные пары |
g(Y ) = YB ® min, |
|
1. |
1. |
|||
AX £ B, |
YA ³ C, |
|||
|
X ³ 0; |
|
Y ³ 0. |
|
2. |
F ( X ) = CX ® min, |
2. |
g(Y ) = YB ® max, |
|
AX ³ B, |
YA £ C, |
|||
|
X ³ 0; |
Несимметричные пары |
Y ³ 0. |
|
|
F ( X ) = CX ® max, |
|
||
3. |
3. g(Y ) = YB ® min, |
|||
AX = B, |
|
YA ³ C. |
||
|
X ³ 0; |
|
|
|
4. |
F ( X ) = CX ® min, |
4. |
g(Y ) = YB ® max, |
|
AX = B, |
|
YA £ C. |
||
X ³ 0;
Первая теорема двойственности.
Если одна из пары двойственных задач имеет оптимальный план, то и другая имеет оптимальный план и значения целевых функций задач при их оптимальных планах равны меж-
ду собой, т. е. Fmax = gmin .
Если же целевая функция одной из пары двойственных задач не ограничена(для исходной – сверху, для двойственной – снизу), то другая задача вообще не имеет планов.
Вторая теорема двойственности.
План X * = (x1* , x2* ,..., xn* ) исходной задачи и план Y * = ( y1* , y2* ,..., yn* ) двойственной зада-
чи являются оптимальными планами этих задач тогда и только тогда, когда для любых i и j выполняются равенства:
|
|
|
|
ì |
|
|
¹ 0, |
* |
|
m |
* |
ïx*j |
|
||
(åaij |
ï |
|
|
|
|||
x j |
yi |
- c j ) = 0 Þ í |
|
|
|
||
|
|
i =1 |
|
ï |
* |
= 0, |
|
|
|
|
|
ï x j |
|||
|
|
|
|
î |
|
|
|
|
|
|
|
ì |
|
|
¹ 0, |
* |
n |
* |
ïyi* |
||||
|
ï |
|
|
|
|||
yi |
|
(åaij x j |
- bi ) = 0 Þ í |
|
|
|
|
|
|
j=1 |
|
ï x |
* |
= 0, |
|
|
|
|
|
j |
|||
|
|
|
|
ï |
|
|
|
|
|
|
|
î |
|
|
|
m
åaij yi* = c j , i =1
m
åaij yi* ³ c j , i=1
n
åaij x*j = bi ,
j=1 n
åaij x*j £ bi . j =1
Если в оптимальном плане одной из задач соответствующая переменная отлична от нуля, то ограничение другой задачи в оптимальном плане выполняются в виде равенства. Если в оптимальном плане одной из задач какое-либо ограничение выполняется в виде строгого неравенства, то соответствующая переменная другой задачи в оптимальном плане равна нулю.
Эти условия позволяют, зная оптимальное решение одной из взаимно двойственных задач, найти оптимальное решение другой задачи.
8
Пример. Решить задачу линейного программирования симплексным методом. Составить для данной задачи линейного программирования двойственную задачу и по решению прямой задачи найти решение двойственной, используя теоремы двойственности.
z = 2x1 + 3x2 |
|
® max |
||
ì- x1 + 2x2 |
£ 1, |
|||
ï |
2x |
+ x |
2 |
£ 8, |
í |
1 |
+ x |
³ 3, |
|
2x |
2 |
|||
ï |
1 |
|
³ 0. |
|
î |
x1 , x2 |
|||
Приведем задачу к каноническому виду. Для этого к левой часть первого неравенства прибавим дополнительную неотрицательную переменную x3 , к левой части второго - x4 . А
вот из левой части третьего неравенства вычтем переменную x5 . В целевую функцию каждая из этих переменных входит с коэффициентом 0 (т. е. не входят). Получаем
z = 2x1 + 3x2 + 0x3 + 0x4 |
+ 0x5 ® max |
|||||
ì - x1 + 2x2 |
+ x3 |
= 1, |
||||
ï |
2x |
+ x |
2 |
+ x |
4 |
= 8, |
í |
1 |
+ x |
- x |
= 3, |
||
2x |
2 |
5 |
||||
ï |
1 |
|
|
|
||
îx1 |
, x2 , x3 , x4 , x5 ³ 0. |
|||||
Преобразованную систему уравнений запишем в векторной форме: x1 P1 + x2 P2 + x3 P3 + x4 P4 + x5 P5 = P0 ,
|
æ-1ö |
; |
|
æ2ö |
; |
|
æ1ö |
; |
|
æ0ö |
; |
|
æ 0 ö |
; |
|
æ1ö |
|||||||||
где P = ç |
2 |
÷ |
P = ç |
1 |
÷ |
P = ç |
0 |
÷ |
P = ç |
1 |
÷ |
P = ç |
0 ÷ |
P = ç8÷ . |
|||||||||||
1 |
ç |
2 |
÷ |
|
2 |
ç ÷ |
|
3 |
ç ÷ |
|
4 |
ç ÷ |
|
5 |
ç |
÷ |
|
0 |
ç ÷ |
||||||
|
è |
ø |
|
|
è |
1 |
ø |
|
|
è |
0 |
ø |
|
|
è |
0 |
ø |
|
|
è |
-1ø |
|
|
è3ø |
|
Среди векторов P1, P2, P3, P4, P5, только два единичных вектора (P3 и P4), т.е. единичного базиса нет. Поэтому составим расширенную задачу. Для этого в левую часть третьего уравнения системы ограничений добавимискусственную переменную x6 . Её нужно как
можно быстрее вывести из базиса. Поэтому в целевую функцию в задаче максимизации новая переменная войдёт с очень большим отрицательным коэффициентом–М. Расширенная задача имеет опорный план X = (0, 0, 1, 8, 0, 3) , определяемый системой трёх единичных век-
торов: P3 , P4 , P6 .
Составим симплексную таблицу для I итерации:
|
|
|
Базис |
|
СБ |
|
|
P0 |
|
2 |
3 |
|
0 |
|
0 |
0 |
|
-М |
|
|
|
|
|
|
|
|
P1 |
P2 |
|
P3 |
|
P4 |
P5 |
|
P6 |
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
1 |
|
P3 |
|
0 |
|
1 |
|
-1 |
2 |
|
1 |
|
0 |
0 |
|
0 |
|
|
|
2 |
|
P4 |
|
0 |
|
8 |
|
2 |
1 |
|
0 |
|
1 |
0 |
|
0 |
|
|
|
3 |
|
P6 |
|
-М |
|
3 |
|
2 |
1 |
|
0 |
|
0 |
-1 |
|
1 |
|
|
|
4 |
|
b j |
|
F0 |
|
|
0 |
|
-2 |
-3 |
|
0 |
|
0 |
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
a j |
|
|
|
-3 |
|
-2 |
-1 |
|
0 |
|
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычислим |
оценки |
разложений |
векторов по |
базису |
опорного |
решения по формуле |
|||||||||||||
Dj =z j -cj |
, где zj находится как скалярное произведение вектора Pj (j=1,m) на вектор Сб=(с1, |
||||||||||||||||||
с2, ...,сm):
m
z j = åci aij ( j = 1, m) .
i=1
9

D |
1 |
=C P - с = (0,0,-M ) × (-1,2,2) - 2 = -2 - 2M; |
|
б 1 1 |
D2 =Cб P2 - с2 = (0,0,-M ) × (2,1,1) - 3 = -3 - M;
D3 = Cб P3 - с3 = (0,0,-M ) × (1,0,0) - 0 = 0;
D4 =Cб P4 - с4 = (0,0,-M ) × (0,1,0) - 0 = 0;
D5 =Cб P5 - с5 = (0,0,-M ) × (0,0,-1) - 0 = M;
D6 =Cб P6 - с6 = (0,0,-M) ×(0,0,1) - (-M ) = 0.
Оценки векторов, входящих в базис, всегда равны нулю.
Значение F0 равно скалярному произведению вектораP0 на вектор Сб:
F0=1*0+8*0+3*(-М) = -3М.
Значения F0 и z j -c j состоят из двух слагаемыхMa j + b j . Слагаемое, которое не со-
держит М, записываем в 4-й строке, а число, стоящее при М – в 5-й.
Начальное опорное решение не является оптимальным, так как в 5-й строке имеется два отрицательных числа a1 = -2 и a2 = -1. Для оптимальности опорного решения в задаче на максимум требуется неотрицательность оценок для всех векторов. Чтобы перейти к новому опорному решению в базис можно ввести любой из векторов P1 и P2. Выберем P1, так как ему соответствует наибольшая по модулю оценка. Для определения вектора, подлежащего выво-
ду |
из |
базиса, находят |
|
q j |
= min( |
bi |
) |
для |
всехaij>0. Для |
вектора P1 получим |
|||||||||
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
aij |
|
|
|
|
|
q |
1 |
= min( |
b2 |
; |
b3 |
) = min( |
8 |
; |
3 |
) = |
3 |
( a = -1 < 0 , поэтому отношение |
b1 |
не рассматриваем). |
|||||
|
|
|
|
|
|
|
|||||||||||||
|
|
a21 |
|
a31 |
2 |
|
2 |
|
2 |
11 |
|
|
|
a11 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Минимум достигается при i=3. В третьей строке столбца «Базис» находится вектор Р6. Следовательно, его из базиса исключаем.
Далее выполним преобразование Жордана с разрешающим элементомa31 =2: 1) разде-
лим всю третью строку на2 и запишем результат в новую симплексную таблицу; 2) остальные элементы первого столбца нужно занулить, для этого полученную 3-ю строку сложим с первой, результат запишем в первую строку новой симплексной таблицы; 3) умножим 3-ю строку на -2 и сложим со второй строкой, результат запишем во вторую строку новой симплексной таблицы.
Получим симплексную таблицу для II итерации:
|
Базис |
СБ |
P0 |
2 |
3 |
0 |
0 |
0 |
-М |
|
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
|||
|
|
|
|
||||||
1 |
P3 |
0 |
5/2 |
0 |
5/2 |
1 |
0 |
-1/2 |
1/2 |
2 |
P4 |
0 |
5 |
0 |
0 |
0 |
1 |
1 |
-1 |
3 |
P1 |
2 |
3/2 |
1 |
1/2 |
0 |
0 |
-1/2 |
1/2 |
4 |
|
|
3 |
0 |
-2 |
0 |
0 |
-1 |
1 |
Она содержит только четыре строки, так как искусственный вектор из базиса исключён и оценки больше не содержат слагаемого с .МЭтот вектор не имеет смысла вводить ни в один из последующих базисов, поэтому в дальнейшем столбец данного вектора можно не заполнять. Но так как от нас требуется найти решение двойственно задачи, то мы его оставим.
Получили новый опорный план X = ( |
3 |
, 0, |
5 |
, 5, 0, 0) и значение целевой функции F0 = 3. |
|
|
|||
2 |
2 |
|
||
Рассмотрим элементы 4-й строки. В столбце векторов P2 и P5 имеются отрицательные числа, значит, найденный план не является оптимальным. Вводить в базис будем вектор P2 , исключать P3 . Получим симплексную таблицу для III итерации.
10
|
Базис |
СБ |
P0 |
2 |
3 |
0 |
0 |
0 |
-М |
|
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
|||
|
|
|
|
||||||
1 |
P2 |
3 |
1 |
0 |
1 |
2/5 |
0 |
-1/5 |
1/5 |
2 |
P4 |
0 |
5 |
0 |
0 |
0 |
1 |
1 |
-1 |
3 |
P1 |
2 |
1 |
1 |
0 |
-1/5 |
0 |
-2/5 |
2/5 |
4 |
|
|
5 |
0 |
0 |
4/5 |
0 |
-7/5 |
7/5 |
Последняя строка снова содержит отрицательное число. В базис вводим вектор P5 , ис-
ключаем P4 .
|
Базис |
СБ |
P0 |
2 |
3 |
0 |
0 |
0 |
-М |
|
P1 |
P2 |
P3 |
P4 |
P5 |
P6 |
|||
|
|
|
|
||||||
1 |
P2 |
3 |
2 |
0 |
1 |
2/5 |
1/5 |
0 |
0 |
2 |
P5 |
0 |
5 |
0 |
0 |
0 |
1 |
1 |
-1 |
3 |
P1 |
2 |
3 |
1 |
0 |
-1/5 |
2/5 |
0 |
0 |
4 |
|
|
12 |
0 |
0 |
4/5 |
7/5 |
0 |
0 |
В 4-й строке последней симплексной таблицы нет отрицательных чисел. Значит найденный опорный план X * = (3, 2, 0, 0, 5, 0) является оптимальным. Значение целевой функции zmax = 12 .
Составим двойственную задачу.
Умножим третье ограничение на-1, тогда все неравенства будут содержать знак«≤». Задача примет вид исходной задачи симметричной пары 1:
z = 2x1 + 3x2 ® max |
||
ì - x1 + 2x2 £ 1, y1 |
||
ï |
+ x2 |
£ 8, y2 |
í 2x1 |
||
ï |
- x2 |
£ -3, y3 |
î- 2x1 |
||
x1 , x2 ³ 0.
Число переменных в двойственной задаче равно числу ограничений в исходной задаче, т.е. трём: y1 , y2 , y3 .
Умножим правые части ограничений на соответствующие переменные двойственной задачи и сложим их, получим целевую функцию: g = y1 + 8y2 - 3y3 .
Целевая функция исходной задачи исследуется на максимум, следовательно, целевая функция двойственной задачи исследуется на минимум.
Матрица системы ограничений исходной задачи имеет вид: |
|
æ -1 |
2 |
ö |
|
|
A = ç |
2 |
1 |
÷ . Транспони- |
|||
|
|
ç |
- 2 |
|
÷ |
|
|
|
è |
-1ø |
|
||
руем её и получим аналогичную матрицу двойственной задачи - A |
T |
æ-1 |
2 |
- 2 |
ö |
|
|
= ç |
2 |
1 |
-1 |
÷ . Правыми |
|
|
|
è |
ø |
|||
частями в ограничениях двойственной задачи являются коэффициенты при |
неизвестных в |
|||||
целевой функции исходной задачи. |
|
|
|
|
|
|
11
Окончательно двойственная задача имеет следующий вид:
g = y1 + 8 y2 |
- 3y3 ® min . |
|
ì- y1 + 2 y |
2 - 2 y3 ³ 2, |
|
ï |
2 y1 + y2 - y3 ³ 3, |
|
í |
||
ï |
y1 , y2 |
, y3 ³ 0. |
î |
||
Найдём её решение, используя теоремы двойственности. По первой теореме двойст-
венности |
оптимальные решения исходной и двойственной задач равны, следовательно, |
g min = zmax |
= 12 . |
Из соотношений второй теоремы двойственности следует, что если какое-то ограничение исходной задачи выполняется в виде строгого неравенства, то соответствующая двойственная оценка равна нулю. Подставим найденное оптимальное решение в систему ограничений исходной задачи:
-1* 3 + 2 * 2 = 1 = 1, 2 * 3 +1* 2 = 8 = 8, 2 * 3 +1* 2 = 7 > 3.
Третье ограничение выполняется в виде строгого неравенства, следовательно, y3* = 0 .
Если некоторая компонента xi* оптимального плана исходной задачи отлична от нуля, то соответствующее ограничение двойственной задачи выполняется в виде равенства. В нашем примере и x1* = 3 ¹ 0 , и x2* = 2 ¹ 0 , следовательно, оба ограничения двойственной задачи выполняются в виде равенства.
ì- y1 + 2 y2 - 2 y3 = 2, |
Учитывая, что |
* |
= 0 , получим: |
ì- y1 + 2 y2 = 2, |
||||||||||
í |
2 y + y |
2 |
- y |
3 |
= 3. |
y3 |
í |
2 y |
1 |
+ y |
2 |
= 3. |
||
î |
1 |
|
|
|
|
|
î |
|
|
|
||||
Решив систему, получим y1 = 4 / 5, y2 = 7 / 5.
Окончательно Y * = (4 / 5, 7 / 5, 0), g min = 12.
Решение двойственной задачи можно получить другим способом, используя формулу
Y * = CБ P-1 .
Матрица P-1 находится в последней симплексной таблице. Ее столбцы расположены под столбцами единичной матрицы, образующими базис начального опорного решения, т. е. под векторами P3 , P4 , P6 (именно для этой цели мы продолжали вычислять вектор P6 ):
æ 2 / 5 1/ 5 0 |
ö |
æ3* 2 / 5 + 0 * 0 + 2 * (-1/ 5) |
ö |
||
ç |
|
÷ |
ç |
|
÷ |
Y * = (3 0 2)ç 0 |
1 -1÷ = ç 3 *1/ 5 + 0 *1 + 2 * 2 / 5 |
÷ = (4 / 5 7 / 5 0). |
|||
ç |
|
÷ |
ç |
3 * 0 + 0 * (-1) + 2 * 0 |
÷ |
è-1/ 5 2 / 5 0 |
ø è |
ø |
|||
Ответ: X * = (3, 2) , zmax |
= 12 ; Y * |
= (4 / 5, 7 / 5, 0), g min = 12. |
|
||
12