

Методическое пособие 703
.pdfРис. 4.5. Схема управления шаговым двигателем. ГИ - генератор импульсов; ФИ - формирователь импульсов; РИ – распределитель импульсов; УМ - усилитель мощности; ШД - шаговый двигатель; ИМ – механизм
Распределитель импульсов преобразует унитарный код в фазную систему прямоугольных импульсов, которые через соответствующие усилители мощности поступают на обмотки двигателя. Таким образом, основные узлы системы управления - распределитель импульсов и усилители мощности. Распределитель импульсов должен обеспечивать заданный закон распределения импульсов без их пропуска и реверс. Схемы распределителей импульсов, как правило, выполняются на триггерных ячейках. Реверс осуществляется посредством двух каналов управления или отдельного триггера реверса. Выбор элементов и схемы распределителя определяется удобством сопряжения с усилителем мощности, простотой и надежностью.
Для синтеза распределителя импульсов наиболее удобны методы теории конечных автоматов. Распределитель синтезируется как автомат Мили. Можно синтезировать любые схемы управления m-фазными шаговыми двигателями с заданной последовательностью коммутации обмоток - как поочередной, так и парной.
161

Усилители мощности непосредственно питают обмотки управления шаговым двигателем. Выбор структуры и элементов усилителей диктуется требуемым частотным диапазоном, режимом работы привода, принятым способом форсировки, напряжением источника питания, параметрами самого двигателя.
В качестве коммутирующих элементов в усилителях мощности используются транзисторы и тиристоры. Транзисторные схемы применяются для управления маломощными шаговыми двигателями. Если транзисторные усилители по своим параметрам не могут обеспечить переключение обмоток двигателя, то используются тиристорные ключи. В этом случае должны быть предусмотрены цепи коммутации тиристоров - схемы гашения, которые строятся с коммутирующими конденсаторами и аналогичны подобным схемам в широтно-импульсных преобразователях. Один из вариантов тиристорного ключа показан на рисунке 6. Здесь гашение основного тиристора VS1 осуществляется посредством вспомогательного тиристора VS2, при включении которого конденсатор разряжается через основной тиристор. В контуре возникает волновой процесс, в результате которого отключается тиристор VS2 и восстанавливаются его запирающие свойства.
Рис. 4.6.Тиристорный ключ, используемый в шаговых двигателях
На рис. 4.7 представлена схема включения и порядок чередования импульсов напряжения на выводах двигателей
162
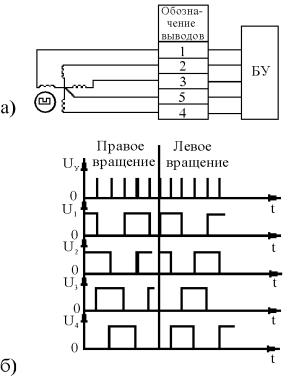
серий ДШ, ДШ-А, ДШ-В.
Рис. 4.7. Схема включения (а) и порядок чередования импульсов напряжения на выводах двигателей ДШ, ДШ-А, ДШ-В (б); БУ - блок управления
Шаговые двигатели нашли достаточно широкое применение. Они используются в системах программного управления металлорежущими станками, в лентопротяжных механизмах, в исполнительных устройствах управления задвижками и вентилями на трубопроводах, в устройствах для перемещения стержней ядерных реакторов и т. д.
Шаговые двигатели используются как двигатели, скорость вращения и отрабатываемые углы которых могут
163

изменяться за счет подачи различного числа импульсов. Шаговые двигатели обеспечивают квантованное движение. Они находят применение как преобразователи числа импульсов в угловые перемещения, как сумматоры импульсов, на базе их может быть построена система дистанционной передачи угла поворота и т. д.
Как правило, шаговые двигатели используются в разомкнутой системе управления. Однако иногда, чтобы исключить опасность пропуска импульсов, двигатели эти можно использовать в замкнутой системе (рис. 4.8). Следует иметь в виду, что в замкнутых системах после отработки заданного перемещения возможны колебания около точки позиционирования, обусловленные задержкой в цифровых блоках.
Рис. 4.8. Замкнутая цепь управления шаговым двигателем. СР - счетный регистр; ДП - датчик положения
Наглядный вариант выходного каскада схемы управления шаговым двигателем приведен на рис. 4.9.
164
I0
I1 
I2
 I3
I3
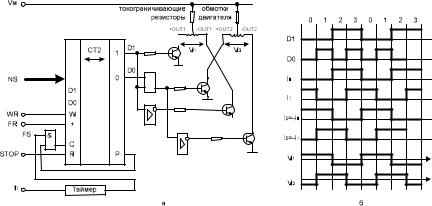
Рис. 4.9. Выходной каскад схемы управления шаговым двигателем: а – схема, б – временная диаграмма
Цифровые сигналы D0 и D1, из которых формируется напряжения бегущей волны, вырабатываются реверсивным счетчиком. В счетчик по команде записи WR загружается число шагов NS. Счетчик считает до тех пор, пока его содержимое не станет равным нулю. В этот момент на выходе переноса Р появляется 0 и счет прекращается, так как сигналом Р закрывается вентиль, подающий импульсы частоты шагания FS на счетный вход счетчика. Частота шагания обычно формируются из тактовой частоты FT счетчиком или таймером. Сигнал FR задает направление счета, и, следовательно, направление вращения двигателя. Сигнал STOP служит для останова двигателя. Заметим, что рассмотренную схему можно реализовать программно, как последовательность команд микро-ЭВМ.
Нетрудно видеть, что представленный на рис. 4.9,б способ коммутации обмоток не единственный. Наибольшее практическое распространение получили 3 способа коммутации, представленные на рис. 4.10.
165
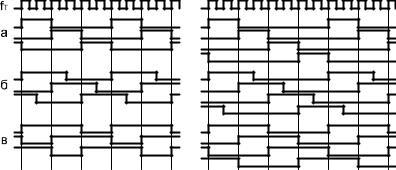
Рис. 4.10. Временные диаграммы тока в обмотках трех- и четырехфазных двигателей при: а – одно-, б – полутора и в –
двухфазных способах запитывания обмоток
Классификация производится по количеству обмоток, в которые одновременно подается ток. На рис. 4.10, а в обмотки поочередно подается ток, на рис. 4.10, в - ток поочередно подается в две обмотки. Промежуточный случай представлен на рис. 4.10, б, где ток подается поочередно в одну или две обмотки. В зарубежной литературе эти способы получили названия соответственно 1 phase excitation, 2 phase excitation и 1 -2 phase excitation, что можно перевести как одно-, двух- и полутора-фазными способами возбуждения (запитывания) обмоток.
Момент сил на валу шагового двигателя зависит от способа запитывания обмоток. Очевидно, что при двухфазном способе он выше по сравнению с однофазным. На высоких скоростях предпочтителен полуторафазный способ.
Практические схемы управления имеют более разветвленную логику управления, мостовой выходной каскад и, как правило, содержат широтно-импульсный ограничитель тока. Логика управления обычно дополняется сигналами запрета и поворота фаз. Мостовой выходной каскад устанавливается, чтобы изменять направление тока в обмотке
166
двигателя при питании от однополярного источника. Команда поворота фаз производит указанное изменение направления: в зависимости от ее положения работают транзисторы одной из диагоналей моста. Широтно-импульсный ограничитель тока служит для снижения мощности развиваемой выходным каскадом.
Устройство типовой схемы управления шаговым двигателем приведено на рис. 4.11. (Для ясности показан только один выходной каскад.) Как видно из pисунка, вход Р управления полярностью открывает вентиль G1 или G2 , вследствие чего цифровой сигнал со входа открывает транзисторы только одной из диагоналей моста: T1,T4 при Р = 1
и T2,T3 при Р = 0. Соответственно изменяется полярность
напряжения, прикладываемая к обмотке двигателя. Широтноимпульсный ограничитель добавляет в схему компаратор, токоизмерительный резистор и таймер. Таймер состоит из диода, RC-цепочки и триггера Шмитта. Ограничитель
стабилизирует величину тока |
в обмотке |
по уровню |
|
Iмах = VREF/RS |
следующим |
образом: |
положим для |
определённости, что в данный момент времени Р= 1, IN1= 1, Q=1, (конденсатор RC-цепочки таймера разряжен), напряжение на токоизмерительном резисторе RS меньше VREF: ILRS< VREF . (IL- ток через индуктивность обмотки). В этом случае будут открыты транзисторы T1 и T4 , а ток IL будет плавно нарастать до величины Iмах. . После срабатывания компаратора через диод D зарядится конденсатор RC-цепочки таймера. На время TM (длительности разряда конденсатора) закроются транзисторы T1 и T4 .В течение этого времени на обмотке будет напряжение обратной полярности и ток уменьшится на величину ΔI=VL(TM /L). VL VM , VM - напряжение на обмотке, L-индуктивность обмотки двигателя. После окончания импульса таймера откроются транзисторы T1 и T4 иполярность напряжения на обмотке изменится снова. Ток в обмотке снова
167
начнет нарастать, причем на величину I он нарастет практически за то же время Тм, так как во время спада тока напряжение на обмотке практически такое же как и во время нарастания. Следовательно, средний ток IW в обмотке равен:
I |
|
i |
|
I |
I |
|
, |
(4.4) |
|
|
|
||||||
|
W |
MAX |
2 |
|
MAX |
|
|
|
Назначение выводов схемы приведено в таблице ниже.
|
Назначение выводов схемы |
СИМВОЛ |
НАЗНАЧЕНИЕ |
P |
Направление тока в обмотках |
IN1 |
Вход фазы 1 |
IN2 |
Вход фазы 2 |
RC |
Времязадающая RC цепочка таймера ограничителя |
|
тока |
COM |
Общий вывод выходного каскада |
UM |
Вывод установки максимального тока выходного |
|
каскада |
OUT1+ |
Неинвертирующий выход фазы 1 |
OUT1- |
Инвертирующий выход фазы 1 |
VM |
Напряжение питания выходного каскада |
Шаговый двигатель можно заставить работать в режиме свободного хода, когда его скорость будет определяться приложенным напряжением и нагрузкой на валу. Для этого нужно, чтобы импульсы, из которых формируется напряжение
168
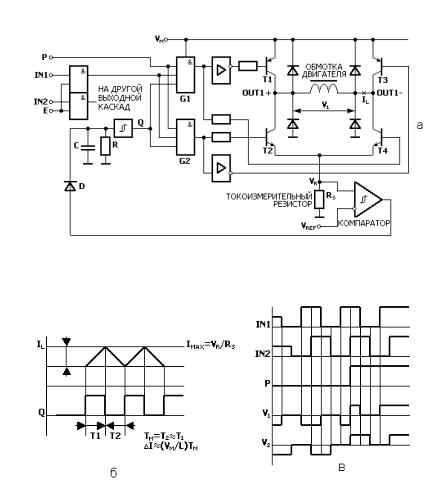
Рис. 4.11. Устройство схемы управления шаговым двигателем а,б, в – временные диаграммы управления полярностью и ограничение тока
бегущей волны, вырабатывались как функция угла поворота ротора, то есть его положения. Устройство и работа схемы управления шаговым двигателем в режиме свободного хода представлены на рис. 4.12. Для ясности рассматриваемый
169
двигатель имеет одну пару полюсов ротора и две обмотки статора. Обмотки подключены через токоограничивающие резисторы, напряжение с датчиков поступают на вход триггеров Шмитта. На рис. 4.12, в показаны все 4 возможные комбинации знаков тока в обмотках и соответствующие им положения ротора. Эти положения находятся под углом 45 к вертикали, точно напротив датчиков положения. При нахождении ротора в окрестности датчика происходит срабатывание соответствующего триггера, в результате чего в обмотки подается ток, притягивающий ротор к следующему по ходу вращения датчику. Направление вращения задается переключателем. При вращении в отрицательном направлении (по часовой стрелке) контакт переключателя поднят вверх (FR = 1), напряжение U1 коммутирует ток I1 в обмотке 1, U0 – ток I0 в обмотке 0. В исходном состоянии, когда по обмоткам не протекает ток, ротор будет притянут полюсом к сердечнику одной из катушек, то есть займет положение под углом 0 или 90 к вертикали. При подаче питания триггеры установятся в какие-то состояния, ротор будет стремиться занять соответствующее положение. При этом он либо достигнет, либо пройдет мимо датчика, вызывая перебрасывание соответствующего триггера, после чего начнется равномерное вращение двигателя. Заметим, что описанная процедура работы и особенно запуска надежна, если датчики вырабатывают напряжение только по положению, без влияния скорости ротора. Наиболее простыми и надежными датчиками, являются датчики Холла, поэтому они практически вытеснили все другие типы датчиков из применения в двигателях.
170