

Методическое пособие 703
.pdfдвигателя в БДПТ является постоянство угла сдвига между основными гармониками э.д.с. Е0, наведенной в обмотке полем ротора Ф0, и фазного напряжения U:
= const. |
(3.4) |
Из рассмотрения принципа работы БДПТ нетрудно заметить, что величина этого угла определяется углом сдвига в пространстве осей полюсов ротора двигателя и датчика, если предположить, что оси полюсов одноименных фаз их статоров совпадают. Угол не зависит от нагрузки на валу и напряжения сети.
Работа синхронного двигателя в качестве БДПТ в соответствии с условиями (3) и (4) обеспечивает полное отсутствие опасности выхода двигателя из синхронизма. Изменение скорости вращения и соответственно частоты тока в обмотке с изменением напряжения сети или нагрузки на валу обусловливает возможность плавного регулирования скорости двигателя в широких пределах. Рабочие характеристики БДПТ подобны соответствующим характеристикам коллекторного двигателя постоянного тока, а угол эквивалентен углу сдвига щеток с геометрической нейтрали.
Известно, что в коллекторных двигателях число коммутируемых секций выбирается максимально возможным с целью снижения э.д.с. коммутации и обеспечения безыскровой коммутации.
В БДПТ число обмоток (фаз), переключаемых коммутатором, должно выбираться минимально возможным, обеспечивающим необходимые рабочие свойства двигателя. Увеличение числа фаз двигателя связано с усложнением схемы коммутатора и датчика положения. С другой стороны, уменьшение числа фаз приводит к нежелательному увеличению их индуктивности. Величина индуктивности обмотки статора БДПТ зависит от мощности двигателя, геометрии активных частей и т.д.
141
Повышенная индуктивность коммутируемых цепей БДПТ (по сравнению с коллекторными машинами) определенным образом сказывается на его рабочих свойствах, как будет показано ниже.
Влияние индуктивности обмоток статора при анализе целого ряда физических процессов, протекающих в бесконтактном двигателе постоянного тока, нельзя не учитывать вследствие большого ее значения. В обычном двигателе постоянного тока с коллектором и щетками индуктивность отдельных секций весьма незначительна. Объясняется это тем, что общее весьма большое число витков обмотки якоря разбивается на большое число секций, равное числу коллекторных пластин. В результате каждая секция имеет небольшое число витков, а следовательно, и небольшую индуктивность, которая пропорциональна квадрату числа витков (L ~ 2).
В бесконтактном двигателе постоянного тока обмотка статора (якоря), общее число витков которой не меньше, чем обмотки якоря контактного (коллекторного) двигателя, разбивается максимум на 3...4 обмотки-секции, каждая из которых содержит большое число витков и, следовательно (так как L ~ 2) обладает значительной индуктивностью. Если в обычных двигателях постоянного тока индуктивность секций практически учитывается лишь при анализе коммутационного искрения, то в бесконтактных двигателях ее необходимо учитывать и при анализе основных процессов, определяющих рабочие характеристики.
Рассмотрим вначале влияние индуктивности обмоток на силу и характер изменения тока и вращающего момента. Для упрощения анализа предположим, что: 1) ЭДС вращения Е, наводимая потоком постоянного магнита, за время открытого состояния транзистора (данной обмотки) постоянна по величине; 2) транзисторы коммутатора мгновенно замыкают и разрывают цепь обмотка якоря - источник питания; 3) взаимоиндуктивность между обмотками мала и ею можно
142
пренебречь.
С учетом сделанных допущений уравнение напряжений можно записать так:
U = E + L |
di |
+ ir. |
(3.5) |
|
|||
|
dt |
|
|
Выражение тока двигателя может быть получено путем решения этого уравнения относительно тока:
i = |
U E |
(1 - е-t/T), |
(3.6) |
|
|||
|
r |
|
|
где Т = L/r - постоянная времени.
Анализируя это выражение тока, нетрудно заметить, что он устанавливается не мгновенно, а нарастает по экспоненте. Установившееся значение тока (при t = ) равно значению тока, которое имеет место при отсутствии индуктивности (7-5). Обозначив этот ток IL=0, получим
i = IL=0(1 - е-t/T). |
(3.7) |
При больших частотах вращения, |
когда время t между |
включением и отключением обмотки невелико, то есть значительно меньше Т, ток в обмотке не успевает достигнуть установившегося значения. Чем больше частота вращения, тем меньше максимум тока, тем больше он отличается от IL=0. Индуктивность L замедляет процесс нарастания тока, поэтому чем больше L, тем больше ток i отличается от IL=0.
Вращающий момент двигателя прямо пропорционален току якоря и магнитному потоку постоянного магнита (7-4). Пренебрегая пульсацией момента из-за неравномерного вращения МДС статора (см. рис. 7,5), а также уменьшением магнитного потока ротора из-за размагничивающего действия токов статора (якоря), что при наличии хорошо стабилизированного магнита вполне допустимо (см. гл.8),
143
выражение вращающего момента можно записать в виде
М = сМФi = сМФ |
U E |
(1 - е-t/T) |
(3.8) |
|
|||
|
r |
|
|
или
М = МL=0 |
+ МL = сМФ |
U E |
- сМФ |
U E |
е-t/T . |
(3.9) |
r |
|
|||||
|
|
|
r |
|
||
Анализируя выражение момента (9), замечаем, что оно состоит из двух частей. Первая МL=0 не зависит от времени. Она равна моменту двигателя при отсутствии индуктивности (7-6). Вторая МL является переменной составляющей. Она появляется из-за индуктивности L. При L = 0 она равна нулю. При всех скоростях вращения двигательного режима (при U>E) вторая составляющая имеет отрицательное значение. Это свидетельствует о том, что, так же как и ток, вращающий момент бесконтактного двигателя уменьшается с ростом индуктивности его обмоток.
На рис. 3.5, а представлены механические характеристики бесконтактного двигателя при различных индуктивностях обмоток L и различных напряжениях питания - коэффициентах сигнала . Они аналогичны характеристикам обычного исполнительного двигателя постоянного тока при якорном управлении только при L 0 нелинейны. Нелинейность характеристик увеличивается с увеличением L. Влияние L особенно велико при выходе из двигательного режима.
Частоту вращения бесконтактных двигателей можно регулировать в широких пределах путем изменения напряжения питания U (коэффициента сигнала ). На практике, однако, этот способ не получил широкого применения. Дело в том, что в схему бесконтактного двигателя органически входит коммутатор, который по существу является усилителем мощности. Воздействуя на входящие в
144

коммутатор транзисторы можно регулировать и стабилизировать частоту вращения ротора бесконтактного двигателя с помощью весьма незначительных мощностей управления. На практике чаще всего применяются частотноимпульсные способы регулирования и стабилизации.
На рис.5,б представлены рабочие характеристики бесконтактного двигателя со стабилизацией частоты вращения при малых моментах сопротивления.
Для осуществления регулирования частоты вращения на статоре двигателя размещаются дополнительные тахогенераторные обмотки, напряжение с которых, пропорционально частоте вращения вала электродвигателя поступает на схему сравнения с выхода которой сигнал рассогласования поступает на схему управления, которая вызывает соответствующие изменения силы тока в силовых обмотках С. Таким образом замыкается обратная связь и стабилизируется частота вращения ротора.
Рис. 3.5. Механическая (а) и регулировочная (б) характеристики бесконтактного двигателя постоянного тока
(L2>L1)
145
На рис. 3.6 представлена практическая схема включения бесконтактного электродвигателя типа БДС-02, используемого в магнитофонах модели “ВЕСНА”.
На вход усилителя постоянного тока, выполненного на транзисторах VT4, VT5 (и управляющего работой электронных ключей), подается напряжение, равное разности напряжений с обмоток тахогенератора и опорного напряжения стабилитронов VD14, VD15 или VD16. Пока это напряжение не превысит напряжения пробоя стабилитронов, транзистор VT5 остается открытым и частота вращения вала увеличивается. По мере разгона, когда напряжение тахогенератора превысит напряжение пробоя стабилитрона, транзистор VT5 закроется и электродвигатель отключится от источника питания. В результате возникает процесс включения и выключения, аналогичный процессу при работе электродвигателя с центробежным регулятором.
146
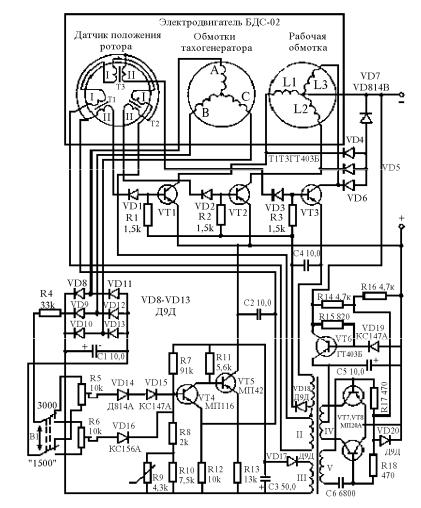
Рис. 3.6. Практическая схема включения бесконтактного электродвигателя постоянного тока типа БДС-0,2
Регулировку частоты вращения вала производят с помощью подстроечных резисторов R5 и R6. Температурная стабилизация осуществляется с помощью терморезистора R9, включенного в цепь базы транзистора VT4. Питается стабилизатор частоты вращения от обмотки III трансформатора
147
T4 через диод VD17.
Большинство электродвигателей не имеют специальных мест для крепления, так как они предназначены для размещения в ферромагнитном экране. Между корпусом двигателя и экраном прокладывают полоски из мягкой резины, а сам экран прикрепляют к плате механизма. Такой способ крепления позволяет снизить шум и вибрацию от электродвигателя, а также ослабить электромагнитные поля рассеяния, создающие помехи при записи и воспроизведении.
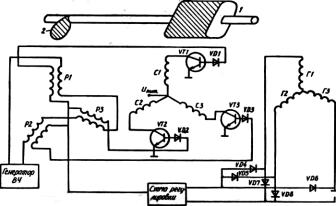
На рис. 3.7 показана функциональная схема питания бесконтактного электродвигателя постоянного тока.
Рис. 3.7. Функциональная схема питания бесконтактного двигателя постоянного тока
Такой двигатель имеет рабочие обмотки, соединенные звездой, ток в которых коммутируется транзисторными коммутаторами. Очередностью включения транзисторов коммутатора управляет датчик положения, находящийся на одном валу с ротором 1. В ротор вмонтированы постоянные магниты возбуждения. Датчик положения 2 управляет работой специальных трансформаторов, на которые подаются колебания высокой частоты от внешнего генератора. Для
148

осуществления регулирования частоты вращения на статоре двигателя размещены дополнительные тахогенераторные обмотки.
В настоящее время разработаны БДПТ не требующие вспомогательного высокочастотного генератора. Момент коммутации тока в обмотках определяется с помощью магнита датчика положения и элемента Холла, включенного в цепь управления коммутатором. Такие двигатели были применены в магнитофоне-приставке “Вега МП-120” на рис. 3.8.
Рис. 3.8. Принципиальная схема питания двигателя магнитофона “Вега МП-120”
На микросхеме DA1-1 и транзисторе VT1 собран усилитель-формирователь сигнала таходатчика (головка BV1), на микросхемах DD3-1 и DD3-2 - ждущий мультивибратор, управляющий работой транзистора VT9, который выполняет роль переменного резистора в цепи усилителя на транзисторах VT10, VT11. На элементах DD3-3 и DD3-4 собран второй ждущий мультивибратор, который управляет генератором пилообразного тока, выполненного на транзисторе VT4. Компаратор напряжения на микросхеме DA1-2 сравнивает опорное напряжение с делителя R27, R28, R29 и выделяет
149
сигнал ошибки. На микросхемах DA2-1 и DA2-2 собраны усилители напряжения, питающие обмотки L1L2 и L3L4 ведущего двигателя. В цепь эмиттера составного транзистора VT10, VT11 включены токовые выводы датчика Холла. Изменение тока, вызванное отклонением частоты вращения двигателя, влияет на величину напряжения на холловских выводах датчика (при прохождении мимо него магнитов ротора). Тем самым осуществляется регулирование и стабилизация скорости вращения двигателя. Резисторами R8А и R22А балансируются усилители обмоток двигателя, коэффициент усиления регулируется резисторами R14P и R30P. Резистор R28 регулирует скорость вращения ведущего двигателя.
3.2. Система бесконтактного электропривода современного видеомагнитофона
Рассмотрим коротко специфику систем бесконтактного электропривода современных видеомагнитофонов. Во всех современных видеомагнитофонах коммутирующее устройство (КУ) выполняют только на специализированных микросхемах. Причем существуют два подхода при конструировании: размещение КУ непосредственно в БДПТ или отдельно, на плате системы управления и авторегулирования. На рис. 3.9 приведена принципиальная схема КУ видеомагнитофона
SANYO - VHR-3100EE.
150