

Силовой расчет входного звена
Силовой расчет входного звена состоит в определении силы реакции в кинематической паре О соединения входного звена 1 со стойкой 6.
Для
выполнения этой задачи изображаем в
масштабе длин схему начального механизма,
состоящего из входного звено 1 и стойки
6 (рис. 6.13, а). В точке А1
прилагаем к входному звену 1 вектор
силы реакции
![]() от оторванного шатуна 2 механизма, а в
точке А7
– вектор силы реакции
от оторванного шатуна 2 механизма, а в
точке А7
– вектор силы реакции
![]() от оторванного шатуна 4. Необходимо
учесть, что
от оторванного шатуна 4. Необходимо
учесть, что
![]() ,
а
,
а
![]() .
.
Вектор
реакции
![]() (см.
рис. 6.13, а) проводим параллельно, но
противоположно вектору реакции
(см.
рис. 6.13, а) проводим параллельно, но
противоположно вектору реакции
![]() ,
имеющемуся на плане сил структурной
группы звеньев 2-3 (см. рис. 6.12). Вектор
реакции
,
имеющемуся на плане сил структурной
группы звеньев 2-3 (см. рис. 6.12). Вектор
реакции
![]() (см. рис. 6.13,а) проводим параллельно, но
противоположно вектору реакции
(см. рис. 6.13,а) проводим параллельно, но
противоположно вектору реакции
![]() ,
имеющемуся на плане сил структурной
группы звеньев 4-5 (см. рис. 6.10).
,
имеющемуся на плане сил структурной
группы звеньев 4-5 (см. рис. 6.10).
![]() (Н);
(Н);
![]() (Н).
(Н).
Сила инерции и момент силы инерции звена 1 по известным формулам получаются равными нулю.
![]() ,
так как
;
,
так как
;
![]() ,
так как
.
,
так как
.
а)
б)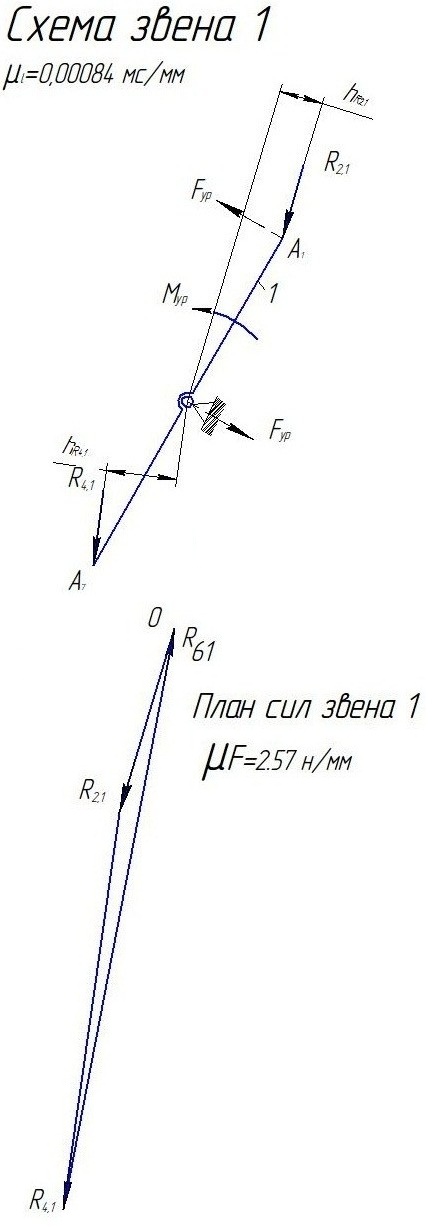



Рис. 6.13. Схема начального механизма (а) и план сил входного звена 1(б)
Для
того, чтобы в рассматриваемый момент
времени входное звено находилось в
равновесии, прилагаем к нему условный
уравновешивающий момент сил
![]() .
Направление стрелки этого момента сил
принимаем произвольно. Если при дальнейшем
расчете значение
получится отрицательным, то это означает,
что действительное направление этого
момента сил является противоположным
принятому направлению.
.
Направление стрелки этого момента сил
принимаем произвольно. Если при дальнейшем
расчете значение
получится отрицательным, то это означает,
что действительное направление этого
момента сил является противоположным
принятому направлению.
Силовой расчет выполняем в следующем порядке:
Cчитаем
звено 1 находящимся в равновесии.
Приравниваем нулю сумму моментов всех
сил и моментов сил, действующих на это
звено
![]() .
.
![]()
![]() (Нм).
(Нм).
Приравниваем нулю векторную сумму всех сил, действующих на звено 1.
![]() .
.
![]() .
.
В
соответствии с уравнением в масштабе
сил
![]() строим план сил (см. рис. 6.13, б), на котором
находим реакцию
строим план сил (см. рис. 6.13, б), на котором
находим реакцию
![]() во вращательной кинематической паре
О .
во вращательной кинематической паре
О .
![]() (Н).
(Н).
Проверка правильности выполнения силового расчета по теореме н.Е.Жуковского
Выполняем проверку силового расчета по теореме Н.Е.Жуковского. Для этого изображаем план скоростей шестизвенного механизма, повернутый на 90˚ против направления движения часовой стрелки (рис. 6.14). В соответствующие точки плана прилагаем все внешние силы и силы уравновешивающие. Повернутый план называется рычагом Н.Е. Жуковского.
К
рычагу прилагаются только силы. Моменты
сил, действующие на звенья механизма,
предварительно заменяются парами сил.
Затем эти силы прилагаются к рычагу.
Заменяем парами момент сил инерции
шатуна
4 (см. рис. 6.9, а), момент сил инерции
![]() шатуна 2 (см. рис. 6.11, а) и уравновешивающий
момент сил
(см. рис. 6.13, а). Векторы этих сил показываем
пунктирными линиями.
шатуна 2 (см. рис. 6.11, а) и уравновешивающий
момент сил
(см. рис. 6.13, а). Векторы этих сил показываем
пунктирными линиями.


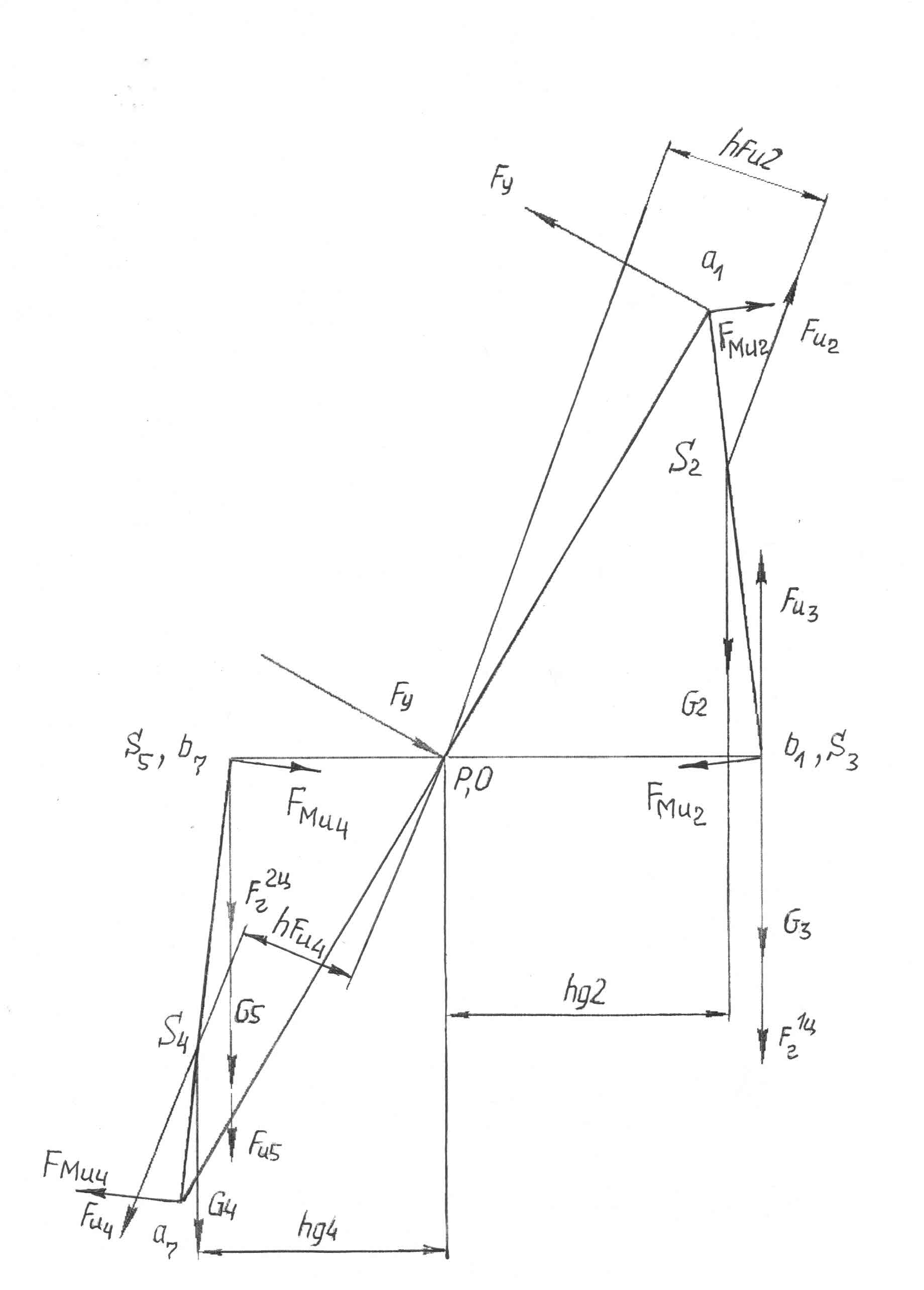
Рис. 6.14. Рычаг Н.Е.Жуковского
Вычисляем
силы
![]() и
от моментов сил инерции звеньев 2 и 4:
и
от моментов сил инерции звеньев 2 и 4:
![]() ;
;
![]() .
.
Составляем условие равновесия рычага Жуковского. Сумма моментов всех сил, приложенных к рычагу относительно точки полюса, должна быть равна нулю: ∑МР=0.
![]()
Находим отсюда величину уравновешивающей силы:
![]()
![]()
Вычисляем уравновешивающий момент сил:
![]() .
.
Ошибка силового расчета механизма составляет:
 .
.
Ошибка силового расчета не превышает наибольшего допустимого значения ошибки (5%).
На рис. П.4 приведен вид второго листа курсового проекта.