

Распишем уравнение относительно рисков:
![]()
Аналогично получим решение относительно противодействующих параметров:
![]() (3.31)
(3.31)
Продифференцируем одно уравнение и подставим в него другое:
![]() (3.32)
(3.32)
![]() (3.33)
(3.33)
Полученное
выражение является уравнением
гармонического осциллятора с периодом
![]() .
.
Рассмотрим систему как замкнутую и обладающую свойством робастной устойчивости по отношению к неопределенности внешних воздействий (рисков). Схем реализации процесса в такой постановке задачи представлена на рис. 3.11 [85, 86, 105].
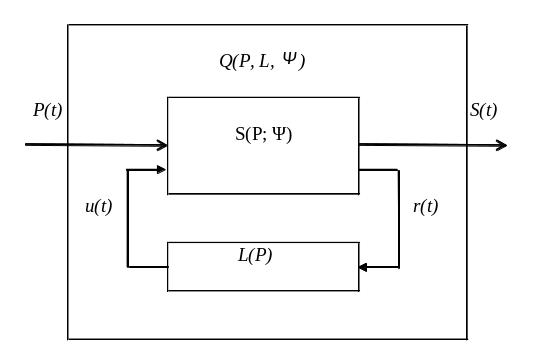
Рис. 3.11. Схема работы экономической системы под воздействием
возмущающих параметров.
На рис. 3.11 приняты следующие обозначения: S(P; Ψ), L(P), Q(P; K; Ψ) – передаточные матрицы объекта, регулятора и замкнутой системы соответственно. Символом Ψ обозначена передаточная матрица той части объекта, которая представляет неопределенность в задании его математической модели.
Предположим, что замкнутая система Q(P; L; Ψ) обладает свойством робастной устойчивости по отношению к неопределенности Ψ (P). В этом случае будем говорить, что регулятор u=L(P)r обеспечивает робастную устойчивость замкнутой системы [85, 105].
Проиллюстрируем понятие робастной устойчивости для систем с неструктурированными неопределенностями (не моделируемой динамикой). На примере объекта инвестиционного управления со скалярными входом u и выходом y, которые связаны между собой уравнением
![]() ,
(3.34)
,
(3.34)
где
![]() –
номинальная передаточная функция.
Объект с математической моделью (3.34)
стабилизируется регулятором
–
номинальная передаточная функция.
Объект с математической моделью (3.34)
стабилизируется регулятором
![]() ,
(3.35)
,
(3.35)
где L(P) - передаточная функция системы (3.34, 3.35).
С целью формализации дальнейшего рассмотрения проблемы, введем ряд понятий, позволяющих количественно характеризовать возмущения математических моделей. Предположим, что передаточная функция L(P) регулятора не изменяется в процессе функционирования, а передаточная функция объекта подвергается воздействию неструктурированных возмущений непараметрического типа. В результате подобного воздействия, регулятор (3.35) фактически замыкает не объект с моделью (3.34), а другой объект
![]() ,
(3.36)
,
(3.36)
передаточная
функция
![]() которого отличается от номинальной
.
которого отличается от номинальной
.
В связи с наличием указанной неопределенности неструктурированного типа, возникают два естественных вопроса, ответы на которые позволяют оценивать качество стабилизирующего регулятора (3.35) в плане допустимости неконтролируемых вариаций математической модели объекта:
будет ли сохраняться устойчивость системы при условии, что возмущение передаточной функции объекта находятся в заданных границах;
каковы предельно допустимые границы изменения возмущений, которые не приводят к потере устойчивости.
Поставленные вопросы относятся к области анализа меры робастной устойчивости динамических систем. Определим показатель Ψ(P) абсолютного возмущения модели (или возмущения номинальной передаточной функции ):
![]() .
(3.37)
.
(3.37)
Соответственно, относительным возмущением модели или номинальной передаточной функции будем называть рациональную дробь
![]() .
(3.38)
.
(3.38)
Взвешенным относительным возмущением модели или номинальной передаточной матрицей (или просто возмущением либо неопределенностью) будем считать
 ,
(3.39)
,
(3.39)
где ![]() – это
заданная весовая дробно рациональная
функция.
– это
заданная весовая дробно рациональная
функция.
Введение
весовой функции
в определение возмущения (3.39) модели
обусловлено амплитудно-частотными
характеристиками (АЧХ)
![]() и
и
![]() для номинального и возмущенного объектов
соответственно.
для номинального и возмущенного объектов
соответственно.
Введем
допустимую границу возмущения номинальной
математической модели, определяя ее
ограничением сверху (для каждой частоты)
величины модуля относительного изменения
АЧХ положительным числом
![]() (это число можно считать заданным в %).
Иными словами, введение функции
(это число можно считать заданным в %).
Иными словами, введение функции
![]() определяет
условие
определяет
условие
![]() ,
(3.40)
,
(3.40)
задающее допустимый «коридор» для вариаций АЧХ фактического (возмущенного) объекта (3.34), что изображено на рис. 3.12.

Рис.3.12. Допустимый «коридор» для вариаций АЧХ
фактического (возмущенного) объекта
Таким
образом, функция частоты
![]() – это относительная ширина допустимого
коридора для АЧХ возмущенного объекта.
Заметим, что работать аналитически с
условием (3.39) не вполне удобно. Вместо
него можно использовать соотношение
вида
– это относительная ширина допустимого
коридора для АЧХ возмущенного объекта.
Заметим, что работать аналитически с
условием (3.39) не вполне удобно. Вместо
него можно использовать соотношение
вида
![]() ,
(3.41)
,
(3.41)
которое является более сильным, чем (3.41), что следует из неравенства
![]() ,
(3.42)
,
(3.42)
справедливого для любых двух комплексных чисел S и Sn. Таким образом, выполнение (3.41) влечет за собой выполнение (3.40).
Итак, если задано дробно-рациональное выражение и для всех передаточных функций объектов с возмущенными моделями выполняется условие (3.41), то согласно (3.38) будет выполняться неравенство
![]() ,
(3.43)
,
(3.43)
то есть АЧХ относительного возмущения модели не выйдет за пределы области допустимого возмущения.
Кроме того, согласно формуле (3.39), для АЧХ взвешенного относительного возмущения ΨP модели объекта будет выполняться неравенство
![]() ,
(3.44)
,
(3.44)
которое можно трактовать, как нормированное ограничение на допустимые вариации линеаризованной модели.
Таким образом, представляется возможным определить «коридор» значений прогнозируемых параметров. Экономически это будут предельные значения влияния факторов как внешних, так и внутренних на результат реализации проекта. Условия нестабильности экономической системы могут быть определены количественно с условиями предельно допустимых отклонений, что дает возможность прогнозирования результатов процесса, подвергаемого непараметрическим воздействиям.
Рассмотрим реализацию модели оценки устойчивости на исследуемом процессе. В данном случае, при адаптации к работе реального объекта, система может быть представлена как совокупность реализаций внутри фазового пространства, верхняя граница которого определена функцией максимальной прибыли без учета рисков, а нижняя – функцией прибыли с максимальным уровнем риска. Границы определены функциями:
fmax(x) = -18,55x2 +1330,1x - 0,96, (3.45)
fmin(x) = -16,08х2 +990,41х +226,24 (3.46)
Система описывается линейными дифференциальными уравнениями.
Для устойчивости линейного дифференциального уравнения n-го порядка с постоянными коэффициентами необходимо и достаточно, чтобы корни характеристического уравнения имели неположительные вещественные части, причем корни с нулевой вещественной частью должны быть простыми. Графически коридор вариаций представлен на рис. 3.13.
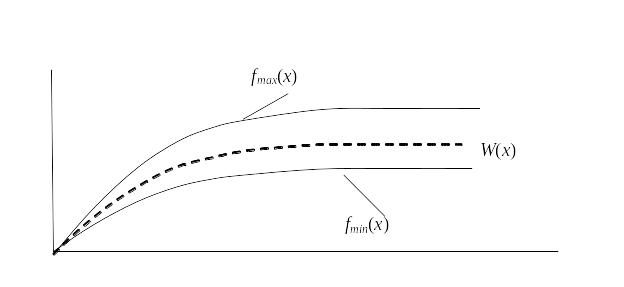
Рис.3.13. Коридор вариаций параметров системы.
В соответствии с рис. 3.13
![]() ˂
˂![]() (3.47)
(3.47)
На основании (3.45) и (3.46) получим:
-16,08х2 +990,41х +226,24 ˂ -18,55x2 +1330,1x - 0,96 (3.48)
Решая квадратное неравенство, получим интервал значений [0,67; 136]. Если х – количество этажей высотного объекта, то в данном случае реализация будет эффективна на указанном интервале значений.
Функция частоты – это относительная ширина допустимого коридора для АЧХ возмущенного объекта.
Р ешая
систему уравнений
ешая
систему уравнений
= -16,08х2 +990,41х +226,24
= -18,55x2 +1330,1x - 0,96,
получим
значение функции W(x),
являющееся границей интервала [![]()
![]() ,
определяющее центральное положение
прогнозной линии относительно коридора
варьирования:
,
определяющее центральное положение
прогнозной линии относительно коридора
варьирования:
W(x)= -1,2х2+169,9х-113,6.
Метод позволяет конструировать прогнозные значения исследуемых параметров при заданном коридоре вариаций признака.