

6. Планирование имитационных моделй с экспериментами
Планирование эксперимента позволяет оптимизировать трудовые, временные и материальные затраты на проведение исследований.
Основы теории: построение экономичных планов, по результатам измерений в точках которых, можно делать выводы о неизвестных параметрах функций регрессии, причем делать это на основе четко формализованных процедур.
Рассмотрим двухуровневые планы, в которых влияние на результат эксперимента входных переменных изучается на двух уровнях: при наибольшем и наименьшем значении переменной в исследуемой области.
Рассмотрим простой эксперимент, в котором участвуют только две переменных x – фактор и y – отклик. Тогда x – входная, независимая (экзогенная) переменная, а y – выходная, зависимая (эндогенная) переменная.
Каждый фактор xi, i=1,k может принимать в эксперименте одно из нескольких значений (уровней). Фиксированный набор уровней факторов определяет одно из возможных состояний системы. Каждому фиксированному набору уровней факторов соответствует точка в многомерном пространстве, называемом факторным пространством, а множество этих точек образует поверхность отклика (рис. 6.1).
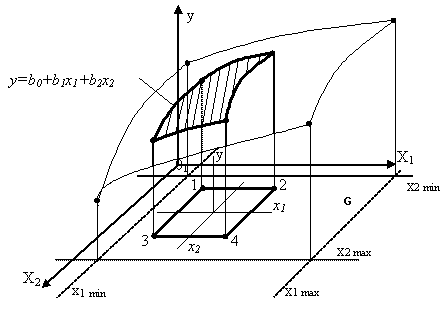
Рис 6.1. Поверхность отклика
На рис. 6.1 показана поверхность отклика для двухфакторного эксперимента. X1 и X2 – факторы, которые в точках 1, 2, 3, 4 принимают определенные значения, которым отвечают соответствующие точки на поверхности. Эксперименты не могут быть реализованы во всех точках факторного пространства, а лишь в принадлежащих допустимой области (на рисунке для двух факторов это плоскость X101X2). Ximin÷Ximax – диапазон изменения факторов.
Связь между факторами и реакцией можно представить в виде соотношения
y=f (X1.......Xn).
Функция f – функция реакции, а геометрический образ, соответствующий функции – поверхность отклика. Функция y=f (X1.......Xn) - не известна. Целью эксперимента является описание этой поверхности в интересной для исследования области варьирования факторов либо определение экстремального значения отклика. Вторая задача может быть сведена к пошаговому выполнению первой, поэтому вначале нас будет интересовать только поиск аналитического выражения близкого к искомой функции в заданной области. Поиск осуществляется на основе обработки данных в т. 1, 2, 3, 4 факторного пространства. Эксперимент нужно поставить так, чтобы при минимальных затратах ресурсов, варьируя факторы, построить математическую модель и оценить ее характеристики.
При планировании изменяются одновременно несколько факторов, которые должны быть совместимы (осуществимы все их комбинации) и независимы (возможность установить фактор на любом уровне независимо от уровней других).
Выбор факторов. При проведении эксперимента факторы могут быть управляемыми и неуправляемыми, наблюдаемыми и ненаблюдаемыми, изучаемыми и неизучаемыми, количественными и качественными, фиксированными и случайными.
После того, как факторы выбраны, нужно определить область, ограничивающую их возможное варьирование и назначить основной уровень. Разница значений между верхним и нижним уровнем не может быть больше физически возможной. Интервал варьирования не может быть меньше ошибки фиксирования уровня фактора, иначе верхний и нижний уровни будут неразличимы.
Факторы, которые нельзя учесть по тем или иным признакам нужно стабилизировать на постоянных уровнях.
Для экспериментального планирования наибольшее применение нашли модели в виде алгебраических полиномов, которые стремятся привести к линейным путем введения фиктивных переменных. Для оценки коэффициентов этих моделей используют методы регрессии.