

3.4.3. Обучающий алгоритм обратного распространения
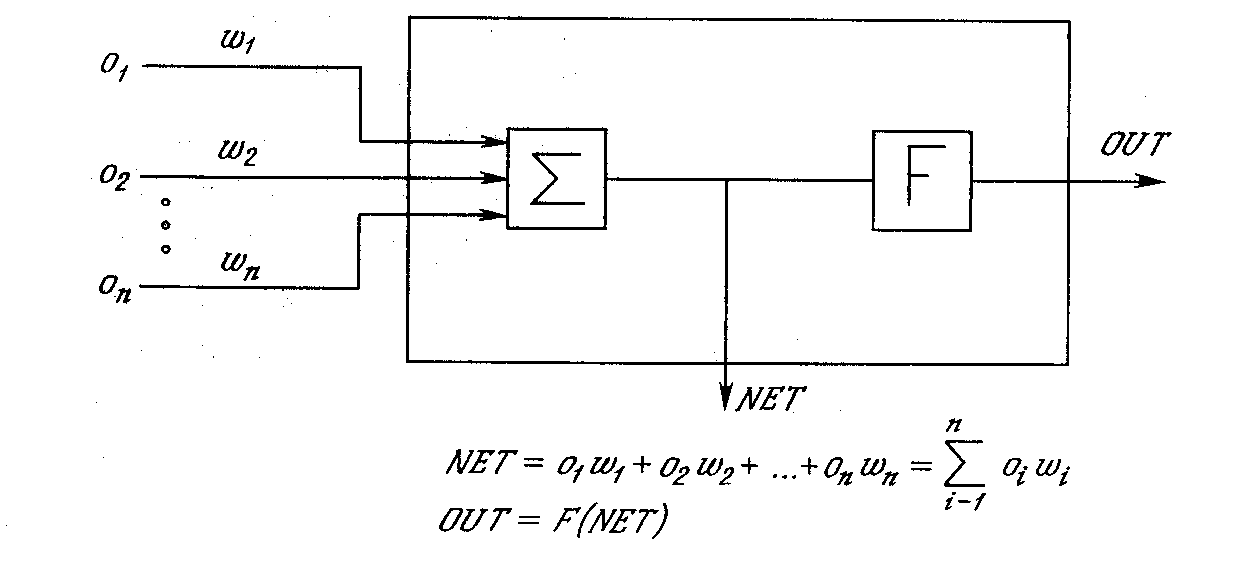
Рис. 3.13. Искусственный нейрон с активационнной функцией
На рис. 3.13 показан нейрон, используемый в качестве основного строительного блока в сетях обратного распространения. Подается множество входов, идущих либо извне, либо от предшествующего слоя. Каждый из них умножается на вес, и произведения суммируются. Эта сумма, обозначаемая NET, должна быть вычислена для каждого нейрона сети. После того, как величина NET вычислена, она модифицируется с помощью активационной функции и получается сигнал OUT [85].
На рис. 3.14 показана активационная функция, обычно используемая для обратного распространения
![]() .
(3.5)
.
(3.5)
![]() .
(3.6)
.
(3.6)
Как показывает уравнение (3.6), эта функция, называемая сигмоидом, весьма удобна, так как имеет простую производную, что используется при реализации алгоритма обратного распространения [75].
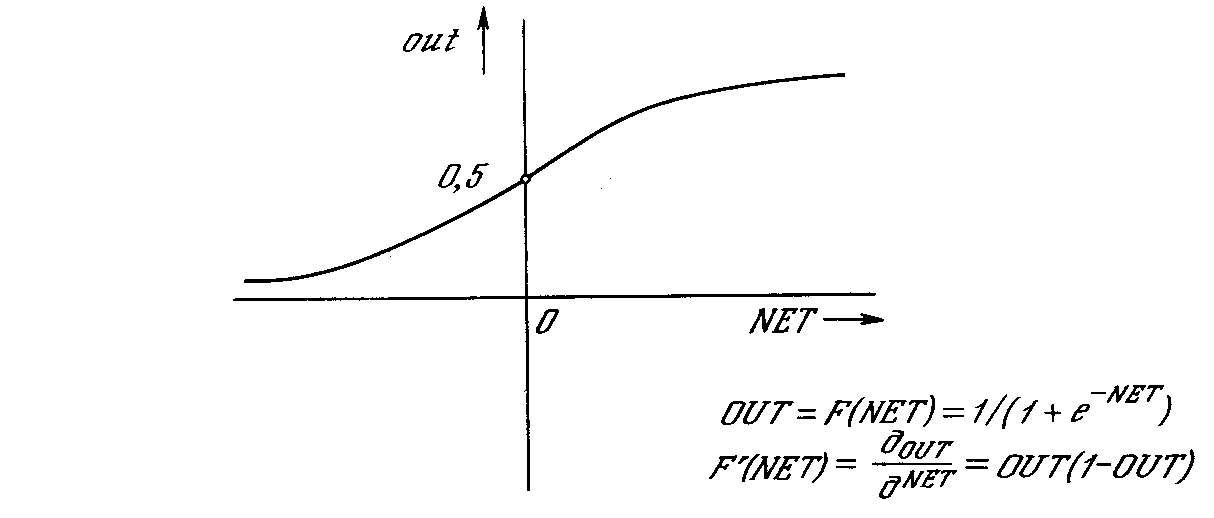
Рис. 3.14. Сигмоидальная активационная функция
Сигмоид, который иногда называется также логистической, или сжимающей функцией, сужает диапазон изменения NET так, что значение OUT лежит между нулем и единицей. Как указывалось выше, многослойные нейронные сети обладают большей представляющей мощностью, чем однослойные, только в случае присутствия нелинейности. Сжимающая функция обеспечивает требуемую нелинейность [76].
В действительности имеется множество функций, которые могли бы быть использованы. Для алгоритма обратного распространения требуется лишь, чтобы функция была всюду дифференцируема [78]. Сигмоид удовлетворяет этому требованию. Его дополнительное преимущество состоит в автоматическом контроле усиления. Для слабых сигналов (величина NET близка к нулю) кривая вход-выход имеет сильный наклон, дающий большое усиление. Когда величина сигнала становится больше, усиление падает. Таким образом, большие сигналы воспринимаются сетью без насыщения, а слабые сигналы проходят по сети без чрезмерного ослабления.
На рис. 3.15 изображена многослойная сеть, которая может обучаться с помощью процедуры обратного распространения. (Для ясности рисунок упрощен.) Первый слой нейронов (соединенный с входами) служит лишь в качестве распределительных точек, суммирования входов здесь не производится. Входной сигнал просто проходит через них к весам на их выходах. А каждый нейрон последующих слоев выдает сигналы NET и OUT, как описано выше.
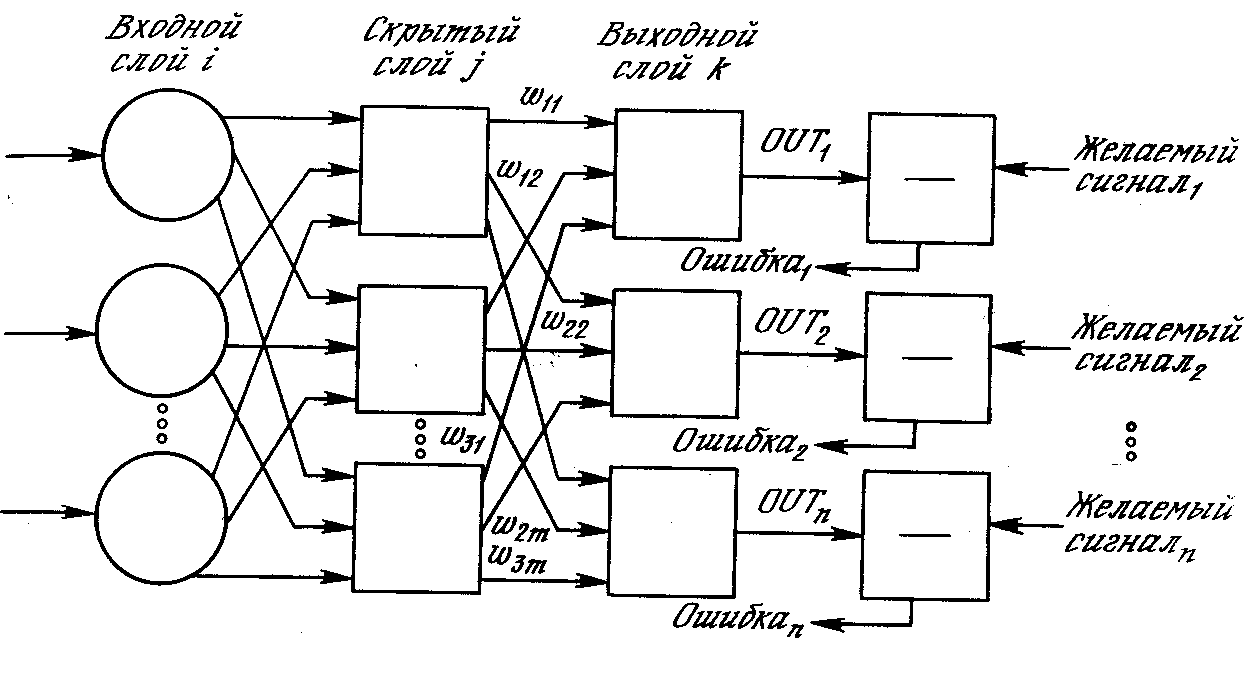
Рис. 3.15. Двухслойная сеть обратного распространения ( – желаемый сигнал)
Процедура обратного распространения применима к сетям с любым числом слоев [81]. Однако для того, чтобы продемонстрировать алгоритм, достаточно двух слоев. Сейчас будут рассматриваться лишь сети прямого действия, хотя обратное распространение применимо и к сетям с обратными связями.
3.4.4. Алгоритм обучения искусственной нейронной сети
Целью обучения сети является такая подстройка ее весов, чтобы приложение некоторого множества входов приводило к требуемому множеству выходов. Для краткости эти множества входов и выходов будут называться векторами. При обучении предполагается, что для каждого входного вектора существует парный ему целевой вектор, задающий требуемый выход [79]. Вместе они называются обучающей парой. Как правило, сеть обучается на многих парах.
Алгоритм обратного распространения ошибок опирается на обобщение дельта-правила [82]. Представим производную ошибки в виде:
![]() ,
,
где E – сумма квадратов ошибок для сети, - наблюдаемый выход элемента.
![]() ,
следует из 3.1 .
,
следует из 3.1 .
Для функции активности выходом является то есть:
![]() ,
,
а для производной f получим:
![]() .
.
Исходя из этого, и принимая во внимание, что
![]() ,
,
получим:
![]() .
.
Указанная ошибка
![]() соответствует
ошибке выходного элемента, но ошибка
скрытого элемента не связана с целевым
выходным значением непосредственно
[77]. Поэтому весовые значения скрытого
элемента следует скорректировать
пропорционально его «вкладу» в величину
ошибки следующего слоя. Для скрытого
элемента величина ошибки вычисляется
по формуле:
соответствует
ошибке выходного элемента, но ошибка
скрытого элемента не связана с целевым
выходным значением непосредственно
[77]. Поэтому весовые значения скрытого
элемента следует скорректировать
пропорционально его «вкладу» в величину
ошибки следующего слоя. Для скрытого
элемента величина ошибки вычисляется
по формуле:
![]() ,
,
где индекс k соответствует слою, посылающему ошибку обратно.
На первой стадии происходит инициализация весов малыми значениями, например, из диапазона -0,3 и +0,3. Обучение предполагается управляемым, поскольку с каждым входным образцом связывается целевой выходной образец. Обучение продолжается до тех пор, пока изменение усредненной квадратичной ошибки не окажется меньше некоторого допустимого значения при переходе от одной эпохи к следующей [32]. Если в процессе обучения наступает момент, когда ошибка в сети попадает в рамки допустимого изменения, говорят, что наблюдается сходимость. Другим критерием окончания обучения можно считать наступление момента, когда выход каждого учебного образца оказывается в рамках допустимого отклонения от соответствующего целевого выходного образца.
Чтобы уменьшить вероятность того, что
изменения весов приобретут осциллирующий
характер, вводится инерционный член
![]() ,
добавляемый в пропорции, соответствующей
предыдущему изменению веса:
,
добавляемый в пропорции, соответствующей
предыдущему изменению веса:
![]() .
.
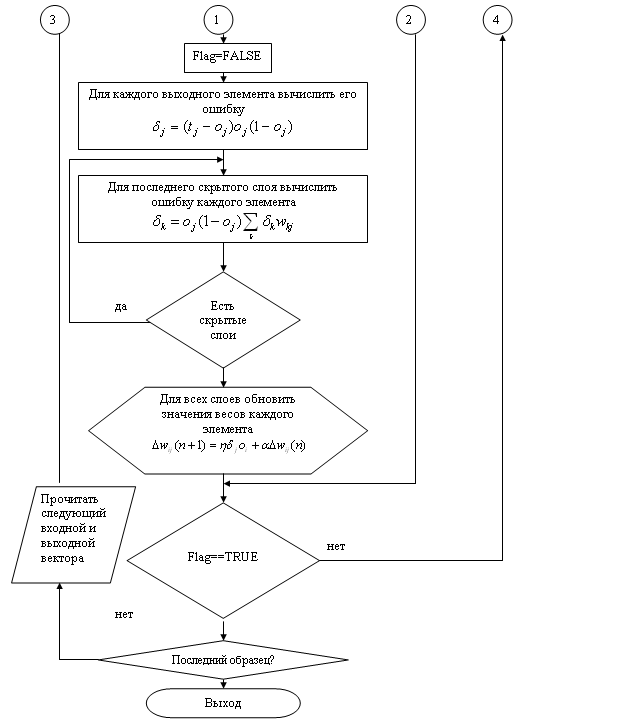
Таким образом, изменение веса на шаге n+1 оказывается зависящим от изменения веса на шаге n. Алгоритм обратного распространения в целом представлен на блок схеме (рис. 3.16).
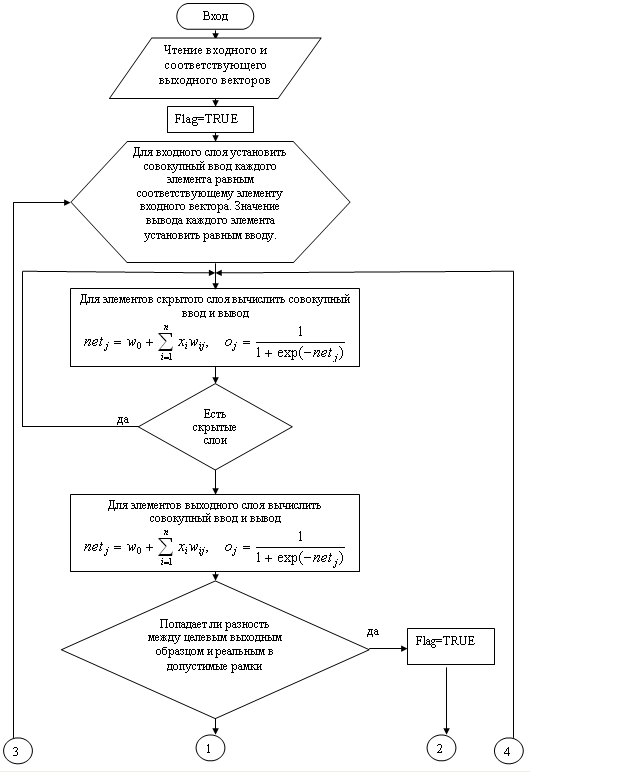
Рис. 3.16. Структурная схема алгоритма
обратного распространения ошибки
да
Flag=TRUE







Р


 ис.
3.16. Продолжение
ис.
3.16. Продолжение