13. Регулирование скорости изменением числа пар полюсов.
Применяется только для АД с короткозамкнутым ротором типа «беличья клетка» (если АД с фазным ротором, нужно было бы менять число пар полюсов на роторе, что невыгодно).
Изменять р (число пар полюсов) можно 2 способами:
1. применять несколько обмоток, которые уложены в одних пазах и имеют разное число пар полюсов;
2. применять обмотку, которая позволяет изменять р переключением схемы соединений обмотки.
АД с переключением р называются многоскоростными. Бывают:
1. двухскоростные – одна обмотка на статоре, у которой переключение р составляет два к одному, т.е. р2: р1=2:1;
2. трёхскоростные – 2 обмотки, одна из которых имеет переключение р два к одному (р2: р1=2:1);
3. четырёхскоростные – 2 обмотки, каждая из которых имеет переключение р два к одному (р2: р1=2:1).
Рассмотрим принцип переключения р:
Н а
первой картинке ток течёт по полуфазам
в одном направлении, создаётся 4 полюса.
При переключении перемычки с к1-н2 на
к1-к2 ток во второй полуфазе меняет
направление. Теперь полюсов два.
а
первой картинке ток течёт по полуфазам
в одном направлении, создаётся 4 полюса.
При переключении перемычки с к1-н2 на
к1-к2 ток во второй полуфазе меняет
направление. Теперь полюсов два.
Рассмотрим два возможных соединения обмоток:
« звезда»
→ «звезда-звезда»
звезда»
→ «звезда-звезда»
а) полуфазы соединены последовательно – ток одинаковый.
б) полуфазы соединены параллельно – токи текут в разном направлении – р уменьшается в 2 раза.
 при
переходе от а к б скорость увеличивается
в 2 раза.
при
переходе от а к б скорость увеличивается
в 2 раза.
 мощность
увеличилась в 2 раза (ток в два раза
увеличился, так как считается сумма
токов 2х полуфаз).
мощность
увеличилась в 2 раза (ток в два раза
увеличился, так как считается сумма
токов 2х полуфаз).
 const,
т.к. и мощность и частота увеличились в
2 раза.
const,
т.к. и мощность и частота увеличились в
2 раза.
«треугольник» → «звезда-звезда»

а) полуфазы соединены последовательно – ток одинаковый.
б) полуфазы соединены параллельно – токи текут в разном направлении – р уменьшается в 2 раза.
 const
const
при переходе от а к б скорость увеличивается в 2 раза.
 момент
уменьшается
момент
уменьшается
n11 — синхронная
частота вращения при числе пар полюсов
p1,
n12
— при числе пар полюсов p2 = 2p1.
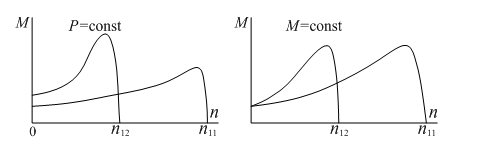
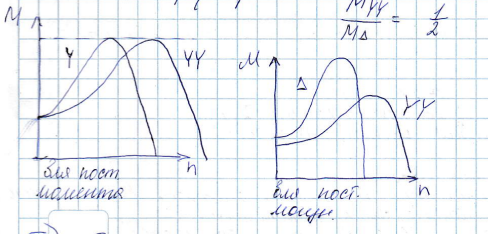 рафики
ниже иллюстрируют полученные зависимости:
рафики
ниже иллюстрируют полученные зависимости:
14. Регулирование скорости уменьшением величины первичного напряжения.

Механические характеристики АД
При
уменьшении напряжения U1
момент вращения изменяется пропорционально
квадрату напряжения (U12).
Значит, меняются механические
характеристики. По ним видно, что
скольжение также изменяется (т.е.
изменяется частота, т.к.
 ),
но оно меняется незначительно. Чтобы
добиться большего изменения s,
в цепь ротора вводят добавочное
сопротивление. Скольжение меняется в
пределах
),
но оно меняется незначительно. Чтобы
добиться большего изменения s,
в цепь ротора вводят добавочное
сопротивление. Скольжение меняется в
пределах

Однако у
этого способа регулирования есть
недостаток: при увеличении скольжения
увеличиваются потери ( т.е. кпд уменьшается.
т.е. кпд уменьшается.
15. Регулирование частоты вращения ад с фазным ротором. Регулирование с помощью реостата в цепи ротора. Регулирование посредством введения добавочной эдс во вторичную цепь ротора.
1. Регулирование с помощью реостата в цепи ротора.
Этот способ регулирования частоты похож на реостатный пуск фазного двигателя, отличие в том, что реостат должен быть рассчитан на длительную нагрузку, и регулирование сопротивления должно быть плавным.
При
 - отношение новое скольжения к старому,
откуда
- отношение новое скольжения к старому,
откуда
 -
величина добавочного сопротивления
-
величина добавочного сопротивления
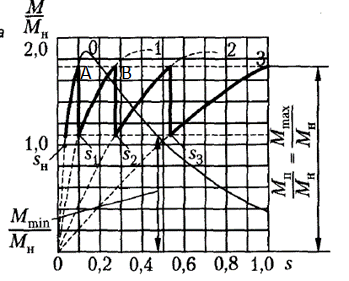
0 – мех. х-ка без доб. сопротивления, 1,2,3 – с добавочным сопротивлением.
Достигнув т. А, введём добавочное сопротивление, соответствующее кривой 1. Поскольку скорость не можем измениться скачком, мы попадаем в т. S1. Теперь Мэм<Мст, значит, появился Мдин<0, скорость начинает замедляться, а скольжение расти, таким образом мы переходим по кривой 1 из т. S1 в т. B. И так далее аналогично.
Минусы:
1) увеличиваются потери на добавочном сопротивлении
2) диапазон регулирования зависит от величины Мст (при малых нагрузках скорость регулируется в малом диапазоне).
2![]() .
Регулирование частоты вращения введением
добавочной ЭДС во вторичную цепь
двигателя.
.
Регулирование частоты вращения введением
добавочной ЭДС во вторичную цепь
двигателя.
Если в цепь ротора подключить источник эдс, то потери скольжения
Можно будет
использовать с пользой. Подключаемый
источник эдс должен иметь частоту
 .
.
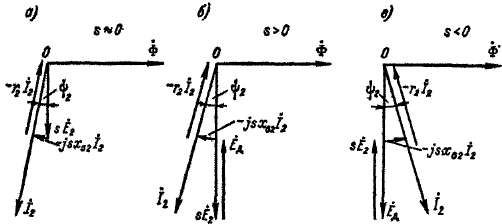
1. Рассмотрим вариант, когда Eд=0 (диаграмма А):
-
 уравнение вращающегося ротора
уравнение вращающегося ротора
![]()
Откуда
2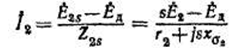 .
встречное включение эдс (приёмник эдс)
(диаграмма Б):
.
встречное включение эдс (приёмник эдс)
(диаграмма Б):
- ток уменьшается при включении эдс
![]()
M = СмI2Ф
– момент уменьшается, тогда скорость
вращения ротора уменьшается, скольжение
возрастёт. С ростом скольжения начнёт
расти ток и соответственно момент. Когда
 получим новый режим работы с другой
скоростью.
получим новый режим работы с другой
скоростью.
3. согласное включение эдс (источник энергии) (диаграмма В):
- при включении эдс ток увеличится, значит
увеличится М (M = СмI2Ф), тогда
скорость вращения ротора начнёт
увеличиваться (т.к.
при включении эдс ток увеличится, значит
увеличится М (M = СмI2Ф), тогда
скорость вращения ротора начнёт
увеличиваться (т.к.
 ,
а скольжение – уменьшаться. Ток продолжит
расти, пока скольжение не станет
отрицательным.
,
а скольжение – уменьшаться. Ток продолжит
расти, пока скольжение не станет
отрицательным.
![]()
Векторные диаграммы для трех случаев: