

ЛР2_3
.pdfЛабораторная работа № 2 Позиционный режим работы сервопривода. Поиск начального положения.
Цель работы
Освоить настройку сервоусилителяASD-A2 в режиме регулирования положения, освоить методы установки вала двигателя в исходное положение. Определить ошибку системы по контуру скорости и показатели качества по контуру положения для каждой реализации переходного процесса. Выбрать наилучшие значения параметров на основании расчетов.
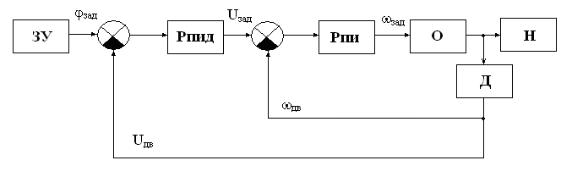
Функциональная схема исследуемой системы автоматического управления
Обозначения:
ЗУ – задающее устройство; Рпид – регулятор по положению; Рпи – регулятор по скорости;
О – объект управления – электродвигатель;
Д – датчик (в качестве него используется z-импульс энкодера); Н – нагрузка.
Расчет показателей качества для каждой реализации переходного процесса
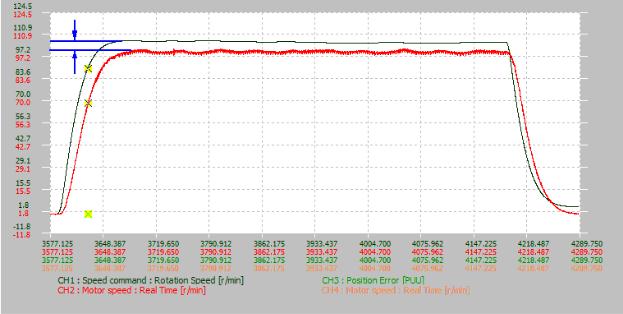
Пример определения ошибки системы по контуру скорости:
Кп |
Ки |
500 |
0 |
Величина деления по вертикали: (110,9 - 97,2)/9 = 1,522 об/мин Разность между установившимся действительным и заданным значениями скорости составляет приблизительно 4 деления.
Ошибка системы: θ = 4×1,522 = 6,1 об/мин
|
|
Кп |
|
Ки |
|
θ, |
|
|
|
|
об/мин |
||
|
|
|
|
|
|
|
1 |
500 |
0 |
6,1 |
|||
2 |
1000 |
0 |
4,3 |
|||
3 |
1500 |
0 |
1,7 |
|||
4 |
2000 |
0 |
1,6 |
|||
5 |
2500 |
0 |
1,1 |
|||
6 |
3000 |
0 |
0,9 |
|||
7 |
|
3000 |
|
1 |
|
0 |
8 |
3000 |
50 |
0 |
|||
9 |
3000 |
100 |
0 |
|||
10 |
|
3000 |
|
200 |
|
0 |
Вывод
Наилучшее значение коэффициента пропорционального усиления Кп = 3000, а коэффициента интегрального усиления Ки – любое, большее 0, так как эти значения параметров позволяют получить ошибку системы, равную 0.
2
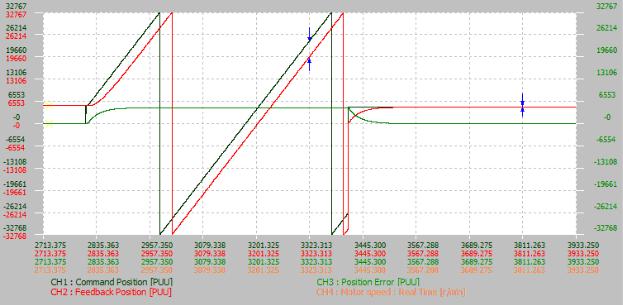
Пример определения показателей качества по внешнему контуру:
Кп |
Кд |
Ки |
40 |
0 |
0 |
Величина деления по вертикали: (26214 - 19660)/9 = 728,2 Кинетическую ошибку определим по второму наклонному участку, ближе к концу участка (в
установившемся режиме). Расстояние между наклонными прямыми составляет приблизительно 6 делений. Тогда кинетическая ошибка:
θкин = 6×728,2 = 4369
По текстовому файлу уточним значение ошибки, оно составляет 4650.
Из графика видно, что наибольшее значение кинетической ошибки в данном случае равно значению в установившемся режиме.
Определим установившиеся значения заданной и действительной характеристик (последний участок графика) по данным из текстового файла:
Uз уст = 4838
Uр уст = 4570
Статическая ошибка: θст = 4838 - 4570 = 268
Пусть ширина коридора допустимого отклонения от заданного значения составляет ±5 %. Определим границы коридора:
1,05Uз уст = 5080
0,95Uз уст = 4596
Действительное установившееся значение не входит в коридор ±5 % от Uз уст, следовательно, время регулирования в данном случае нельзя определить.
Действительная характеристика на последнем участке, начиная от момента подачи значения 4838, не превышает этого значения, следовательно, перерегулирование равно 0.
Для каждой реализации переходного процесса время регулирования Тр определяется следующим образом: по текстовому файлу определяется число отсчетов между моментом появлением сигнала Uз уст и прекращением выхода сигнала за границы коридора 0,95Uз уст ÷ 1,05Uз уст, затем число отсчетов умножается на 0,125 мс.
3
Перерегулирование рассчитывается по формуле σ = (Uр max - Uз уст) / Uз уст × 100 %. Для разных переходных процессов максимальное значение кинетическая ошибка либо принимает в начале подачи линейно изменяющегося сигнала, либо это значение равно значению в установившемся режиме.
№ |
Кп |
Кд |
Ки |
θкин |
θкин max |
θст |
Tp, мс |
σ, % |
1 |
40 |
0 |
0 |
4650 |
4650 |
268 |
- |
0 |
2 |
50 |
0 |
0 |
3824 |
3824 |
291 |
- |
0 |
3 |
100 |
0 |
0 |
2156 |
2156 |
157 |
- |
0 |
4 |
150 |
0 |
0 |
1600 |
1600 |
163 |
- |
0 |
5 |
200 |
0 |
0 |
1323 |
1323 |
171 |
- |
0 |
6 |
250 |
0 |
0 |
1153 |
1157 |
170 |
- |
0 |
7 |
300 |
0 |
0 |
1045 |
1045 |
143 |
- |
0 |
8 |
100 |
0 |
1 |
1916 |
2105 |
133 |
- |
44,8 |
9 |
100 |
0 |
25 |
507 |
1700 |
184 |
- |
144,0 |
10 |
100 |
0 |
50 |
504 |
1552 |
96 |
- |
125,6 |
11 |
100 |
100 |
1 |
503 |
673 |
1 |
10,5 |
33,1 |
12 |
100 |
100 |
25 |
505 |
669 |
12 |
1,0 |
0 |
13 |
100 |
100 |
50 |
505 |
665 |
24 |
30,9 |
0,3 |
14 |
200 |
0 |
10 |
625 |
1214 |
104 |
- |
117,1 |
15 |
200 |
0 |
25 |
510 |
1149 |
98 |
- |
82,5 |
16 |
200 |
0 |
50 |
504 |
1092 |
82 |
- |
76,8 |
17 |
200 |
100 |
10 |
510 |
510 |
0 |
13,0 |
50,0 |
18 |
200 |
100 |
50 |
505 |
505 |
24 |
8,1 |
28,4 |
19 |
300 |
0 |
1 |
949 |
1033 |
23 |
1196,9 |
19,6 |
20 |
300 |
0 |
10 |
491 |
967 |
79 |
- |
59,8 |
21 |
300 |
0 |
20 |
490 |
945 |
77 |
- |
54,3 |
22 |
300 |
0 |
50 |
489 |
905 |
64 |
- |
57,5 |
23 |
300 |
25 |
0 |
906 |
906 |
100 |
- |
0 |
24 |
300 |
50 |
0 |
767 |
767 |
56 |
- |
1,2 |
25 |
300 |
80 |
0 |
600 |
600 |
20 |
6,4 |
13,4 |
26 |
300 |
100 |
0 |
489 |
489 |
10 |
8,4 |
23,7 |
27 |
300 |
100 |
1 |
490 |
490 |
8 |
7,1 |
23,5 |
28 |
300 |
100 |
10 |
490 |
490 |
12 |
13,5 |
23,4 |
Вывод
Наилучшее значение коэффициента пропорционального усиления Кп = 100, коэффициента дифференциального усиления Кд = 100, коэффициента интегрального усиления Ки = 25, так как эти значения параметров позволяют получить наименьшее время регулирования Тр при перерегулировании σ < 10 %. Статическая ошибка при таких значениях параметров достаточно мала, кинетическая ошибка не слишком велика по сравнению с значениями, которые она принимает при других параметрах.
4
Лабораторная работа № 3 Позиционный режим работы сервопривода. Настройка начального положения
качающегося основания.
Цель работы
Освоить настройку сервоусилителяASD-A2 качающегося основания в позиционном режиме. Определить показатели качества по контуру положения для каждой реализации переходного процесса. Выбрать наилучшие значения параметров на основании расчетов.
Функциональная схема исследуемой системы автоматического управления
Обозначения:
ЗУ – задающее устройство; Рпид – регулятор по положению; Рпи – регулятор по скорости;
О – объект управления – электродвигатель; Д – оптический датчик; Н – нагрузка.
5
Расчет показателей качества для каждой реализации переходного процесса
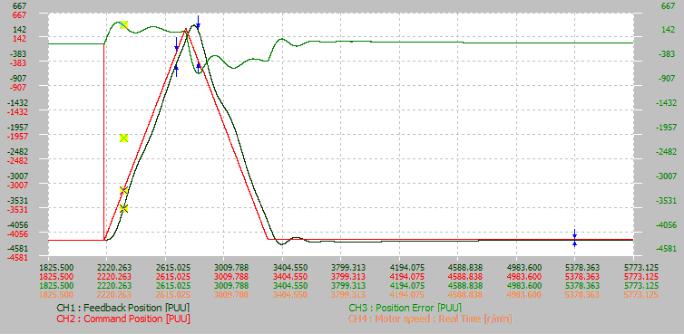
Пример определения показателей качества по внешнему контуру:
Кп |
Ки |
Тд |
Тф |
30 |
0 |
0 |
5 |
Величина деления по вертикали: (142 - ( - 383)) / 9 = 58,3 Кинетическую ошибку определим по наклонному участку, ближе к концу участка (в
установившемся режиме). Расстояние между наклонными прямыми составляет приблизительно 6 делений. Тогда кинетическая ошибка:
θкин = 6×58,3 = 350
Расстояние между наклонными прямыми при максимальной кинетической ошибке составляет приблизительно 10 делений. Максимальное значение кинетической ошибки:
θкин max = 10×58,3 = 583
По данным из текстового файла уточним значение кинетической и максимальной кинетической ошибок:
θкин = 376 θкин max = 503
Определим установившиеся значения заданной и действительной характеристик (последний участок графика) по данным из текстового файла:
Uз уст = -4225
Uр уст = -4159
Статическая ошибка: θст = - 4159 - ( - 4225) = 66
Пусть ширина коридора допустимого отклонения от заданного значения составляет ±5 %. Определим границы коридора:
1,05Uз уст = -4436
0,95Uз уст = -4014
По текстовому файлу определим число отсчетов между моментом появлением сигнала Uз уст и прекращением выхода сигнала за границы коридора 0,95Uз уст ÷ 1,05Uз уст, оно равно 200.
6
Время регулирования равно произведению числа отсчетов и 0,125 мс:
Тр = 200×0,125 = 25 мс
Перерегулирование рассчитаем по формуле (Uр max определяем по текстовому файлу для последнего участка):
σ = |Uр max - Uз уст| / |Uз уст| × 100 % = | - 4280 - ( - 4225)| / 4225 × 100 % = 1,3 %
№ |
Кп |
Ки |
Тд |
Тф |
θкин |
θкин max |
θст |
Tp, мс |
σ, % |
1 |
30 |
0 |
0 |
2 |
349 |
466 |
29 |
270,0 |
1,5 |
2 |
30 |
0 |
0 |
5 |
401 |
503 |
66 |
25,0 |
1,3 |
3 |
30 |
1 |
0 |
5 |
258 |
642 |
8 |
18,8 |
2,4 |
4 |
30 |
2 |
0 |
5 |
150 |
721 |
18 |
306,3 |
4,5 |
5 |
30 |
5 |
0 |
5 |
25 |
761 |
38 |
131,3 |
6,4 |
6 |
30 |
10 |
0 |
5 |
116 |
666 |
13 |
0 |
4,7 |
7 |
30 |
2 |
25 |
5 |
144 |
629 |
11 |
153,1 |
3,6 |
8 |
30 |
2 |
20 |
10 |
137 |
625 |
14 |
6,0 |
2,3 |
9 |
30 |
2 |
20 |
20 |
130 |
630 |
15 |
8,4 |
3,7 |
10 |
30 |
2 |
100 |
2 |
64 |
428 |
7 |
0 |
2,6 |
11 |
30 |
2 |
100 |
20 |
66 |
452 |
6 |
0 |
2,9 |
12 |
30 |
2 |
100 |
50 |
72 |
481 |
3 |
0 |
3,3 |
13 |
35 |
0 |
0 |
5 |
340 |
497 |
54 |
18,8 |
3,0 |
14 |
40 |
0 |
0 |
5 |
314 |
490 |
45 |
7,1 |
2,6 |
15 |
40 |
1 |
0 |
5 |
192 |
604 |
10 |
9,4 |
3,8 |
16 |
45 |
0 |
0 |
5 |
246 |
476 |
45 |
1,6 |
3,2 |
17 |
45 |
1 |
0 |
5 |
164 |
581 |
3 |
1,0 |
4,0 |
18 |
45 |
4 |
0 |
5 |
59 |
715 |
14 |
95,8 |
9,1 |
19 |
45 |
6 |
0 |
5 |
49 |
755 |
7 |
104,0 |
12,0 |
20 |
45 |
10 |
0 |
5 |
45 |
879 |
3 |
968,8 |
18,7 |
21 |
50 |
0 |
0 |
5 |
207 |
463 |
49 |
1,0 |
3,1 |
22 |
50 |
2 |
20 |
20 |
47 |
567 |
1 |
43,5 |
5,1 |
23 |
100 |
0 |
0 |
5 |
23 |
400 |
44 |
0 |
3,4 |
Вывод
Наилучшие значения: Кп = 30, Ки = 2, Тд = 100, Тф = 50, так как эти значения параметров позволяют получить наименьшее время регулирования Тр при перерегулировании σ < 10 %. Статическая ошибка при таких значениях параметров достаточно мала, кинетическая ошибка не слишком велика по сравнению с значениями, которые она принимает при других параметрах.
7