

5.1 Расчет параметров выбранного приводного двигателя
Индуктивность рассеяния статорной обмотки двигателя:

где
 –
индуктивное сопротивление рассеяния
фазы статора;
–
индуктивное сопротивление рассеяния
фазы статора;
 – номинальная
электрическая угловая частота тока
статора;
– номинальная
электрическая угловая частота тока
статора;
 – номинальная
частота напряжения питания двигателя;
– номинальная
частота напряжения питания двигателя;
Полная индуктивность обмотки статора:

где:

Индуктивность рассеяния роторной обмотки двигателя:

где  – индуктивное сопротивление рассеяния
фазы ротора.
– индуктивное сопротивление рассеяния
фазы ротора.
Полная индуктивность обмотки ротора:

Коэффициент рассеяния:

Коэффициент электромагнитной связи ротора:
Коэффициент электромагнитной связи статора:
Электромагнитная постоянная времени статорной цепи:
Электромагнитная постоянная времени роторной цепи:
5.2 Составление структурной схемы
Принцип векторного управления асинхронным двигателем основан на преобразовании координат двигателя (напряжения, тока, магнитного потока и т.д.), которые измеряются в неподвижном положении относительно вращающейся системы координат x, y. В результате этого преобразования выбираются компоненты соответствующих обобщенных векторов во вращающейся системе координат, которые имеют постоянные значения. Их управление позволяет раздельно управлять скоростью и переключением потока асинхронного двигателя.
Использование условий, которые компенсируют основные нелинейности асинхронного двигателя в системе управления как элемента САУ, позволяет математически описать динамические состояния АД с помощью векторной системы управления, соответствующей математическим элементам описания таких режимов для двигателя постоянного тока с двузонным регулированием скорости. Это позволяет применять принципы управления ведомым устройством к асинхронному приводу.
В системе координат x, y, связанной с вектором потокосцепления ротора, электромагнитный момент АД определяется:
 ,
(73)
,
(73)
где  - количество пар полюсов асинхронного
двигателя;
- количество пар полюсов асинхронного
двигателя;
 - коэффициент
электромагнитной связи ротора;
- коэффициент
электромагнитной связи ротора;
 - вектор потокосцепления
ротора, Вб;
- вектор потокосцепления
ротора, Вб;
 - составляющая
тока статора на оси y, А.
- составляющая
тока статора на оси y, А.
Таким
образом, из выражения (73) следует, что
путем стабилизации потокосцепления
ротора,
 управление электромагнитным моментом
сводится к управлению составляющей
тока
управление электромагнитным моментом
сводится к управлению составляющей
тока
 ,
как управление двигателем постоянного
тока с неизменным током возбуждения.
,
как управление двигателем постоянного
тока с неизменным током возбуждения.
Вектор обобщенного потокосцепления ротора определяется:
 ,
(74)
,
(74)
где  - взаимная индуктивность обмоток статора
и ротора, Гн;
- взаимная индуктивность обмоток статора
и ротора, Гн;
 - постоянная времени
контура ротора, с.
- постоянная времени
контура ротора, с.
Из
выражения следует, что стабилизация
или регулирование потокосцепления
ротора может быть достигнута путем
стабилизации или управления проекцией
тока .
.
На основе системы дифференциальных уравнений, описывающих электромагнитные процессы асинхронного двигателя и структурной схемы асинхронного двигателя как объекта управления, структурная схема системы векторного управления представлена в виде модуля потокосцепления ротора и угловой скоростью ротора. Структурная схема системы автоматического регулирования с косвенной ориентацией по вектору потокосцепления ротора представлена на рисунке 10.
Потокосцепление
ротора не зависит напрямую от составляющей
 .
Канал регулирования потокосцепления
содержит два апериодических звена с
передаточными функциями:
.
Канал регулирования потокосцепления
содержит два апериодических звена с
передаточными функциями:
 и
и
 ,
(75)
,
(75)
Следовательно, была построена двухконтурная система подчиненного регулирования с внутренним контуром управления по току статора и с внешней, по модулю потокосцепления ротора.
Канал управления скоростью содержит два контура регулирования: внутренний - по току статора , внешний - по угловой скорости ротора.
В схеме СУЭП сформированы два канала регулирования, параметры регуляторов которых рассчитываются так:
Передаточная
функция
 примет вид:
примет вид:
 ,
(76)
,
(76)
где  - активное сопротивление статора, Ом;
- активное сопротивление статора, Ом;
 - электромагнитная
постоянная времени статорной цепи, с.
- электромагнитная
постоянная времени статорной цепи, с.
Передаточная
функция
 примет вид:
примет вид:
 ,
(77)
,
(77)
где - взаимная индуктивность, Гн;
- электромагнитная постоянная времени роторной цепи, с
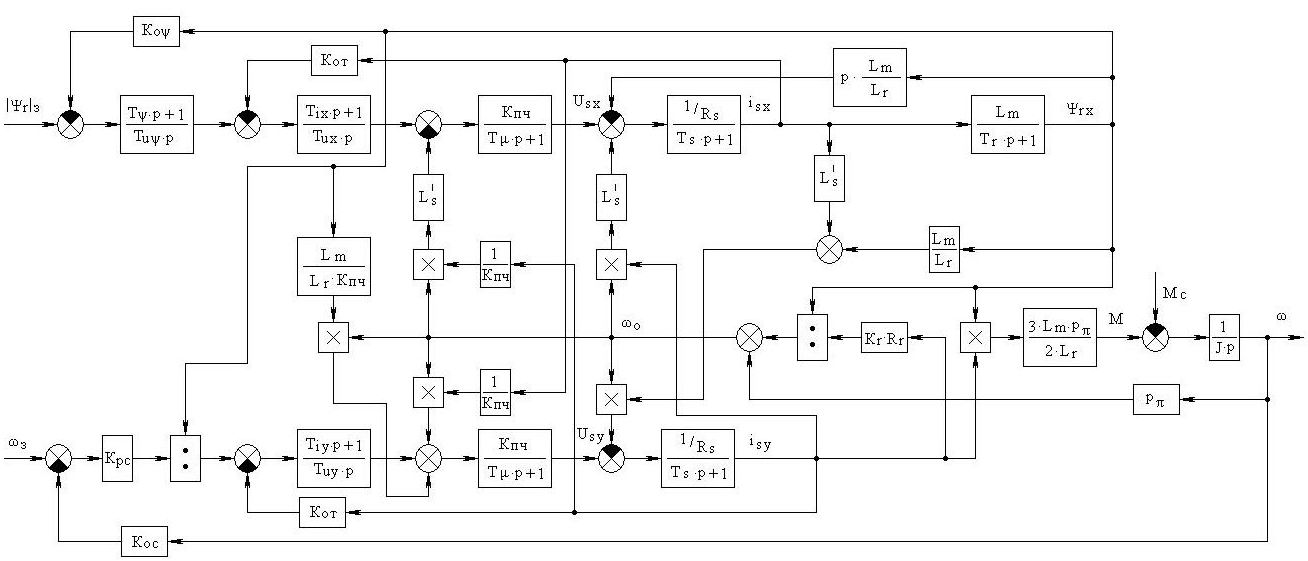
Рисунок 10 - Структурная схема системы автоматического регулирования с косвенной ориентацией по вектору потокосцепления ротора
Динамические свойства преобразователя частоты с блоками измерения и преобразования координат могут быть упрощенно представлены передаточной функцией инерционного звена:
 ,
(78)
,
(78)
где  - коэффициент усиления преобразователя
частоты;
- коэффициент усиления преобразователя
частоты;

 - постоянная времени
преобразователя частоты (
- постоянная времени
преобразователя частоты ( с).
с).
Поскольку максимальное напряжение на выходе преобразователя частоты составляет 400 В, то коэффициент усиления преобразователя частоты определится по формуле:
 ,
(79)
,
(79)
где  - максимальное напряжение на выходе
преобразователя частоты, В;
- максимальное напряжение на выходе
преобразователя частоты, В;
 - максимальное
напряжение управления, В.
- максимальное
напряжение управления, В.
По формуле определим передаточную функцию преобразователя частоты:
 (80)
(80)
Согласно методу расчета подчиненных систем управления, каждый контур канала рассчитывается на модульный оптимум с помощью ПИ-регуляторов, которые компенсируют возмущения соответствующих апериодических звеньев.
Внутренний
контур регулирования составляющие тока
 содержит ПИ-регулятор тока с передаточной
функцией:
содержит ПИ-регулятор тока с передаточной
функцией:
 ,
(81)
,
(81)
где  - электромагнитная постоянная времени
статорной цепи, с;
- электромагнитная постоянная времени
статорной цепи, с;
 - постоянная времени
контура регулирования составляющей
тока
- постоянная времени
контура регулирования составляющей
тока
 ,
с.
,
с.
Постоянная времени контура регулирования составляющей тока определится по формуле:
 ,
(82)
,
(82)
где - постоянная времени преобразователя частоты, с;
- коэффициент усиления преобразователя частоты;
 - коэффициент
обратной связи по току;
- коэффициент
обратной связи по току;
- активное сопротивление статора, Ом.
Коэффициент обратной связи по току определится по формуле:
 ,
(83)
,
(83)
где  -
напряжение обратной связи по току, В.
-
напряжение обратной связи по току, В.
Тогда передаточная функция внутреннего контура регулирования составляющей тока примет вид:
 (84)
(84)
Постоянная времени интегратора ЗИТ определяется соотношением:
 ,
(85)
,
(85)
где  – допустимая скорость изменения тока
– допустимая скорость изменения тока
Номинальное значение потокосцепления определится по формуле:
 Вб,
(86)
Вб,
(86)
где  - номинальный момент эквивалентного
двигателя;
- номинальный момент эквивалентного
двигателя;
 ,
(87)
,
(87)
где  - число пар полюсов двигателя;
- число пар полюсов двигателя;
 - коэффициент
роторной цепи;
- коэффициент
роторной цепи;
 - моментная
составляющая номинального тока статора,
А.
- моментная
составляющая номинального тока статора,
А.
Коэффициент цепи обратной связи контура регулирования потокосцепления ротора асинхронного двигателя определится по формуле:
 ,
(88)
,
(88)
где  - напряжение обратной связи по
потокосцеплению, В;
- напряжение обратной связи по
потокосцеплению, В;
 - номинальное
значение потокосцепления, Вб.
- номинальное
значение потокосцепления, Вб.
Постоянная времени интегрирования контура регулирования потокосцепления ротора асинхронного двигателя определится по формуле:
 с,
(89)
с,
(89)
где - постоянная времени преобразователя частоты, с;
 - взаимная
индуктивность, Гн;
- взаимная
индуктивность, Гн;
 - коэффициент цепи
обратной связи контура регулирования
потокосцепления ротора асинхронного
двигателя;
- коэффициент цепи
обратной связи контура регулирования
потокосцепления ротора асинхронного
двигателя;
 -
коэффициент обратной связи по току.
-
коэффициент обратной связи по току.
Внешний контур регулирования потокосцепления содержит ПИ-регулятор потока с передаточной функцией:
 ,
(90)
,
(90)
где  - электромагнитная постоянная времени
роторной цепи, с;
- электромагнитная постоянная времени
роторной цепи, с;
 - постоянная времени
интегрирования контура регулирования
потокосцепления ротора, с.
- постоянная времени
интегрирования контура регулирования
потокосцепления ротора, с.
Канал регулирования тока Isy и момента содержит одно апериодическое звено, настроенное на модульный оптимум, имеющее вид:
 ,
(91)
,
(91)
где  - активное сопротивление статора, Ом;
- активное сопротивление статора, Ом;
 - электромагнитная
постоянная времени статорной цепи, с.
- электромагнитная
постоянная времени статорной цепи, с.
Следовательно,
внутренний контур регулирования тока
 имеет ПИ-регулятор тока с той же
передаточной функцией, что и в контуре
регулирования тока
,
имеющий вид:
имеет ПИ-регулятор тока с той же
передаточной функцией, что и в контуре
регулирования тока
,
имеющий вид:

 ,
(92)
,
(92)
где  - электромагнитная постоянная времени
статорной цепи, с;
- электромагнитная постоянная времени
статорной цепи, с;
 - постоянная времени
контура регулирования составляющей
тока
,
с.
- постоянная времени
контура регулирования составляющей
тока
,
с.
Коэффициент обратной связи по скорости считается по формуле:
 ,
(93)
,
(93)
где  - напряжение обратной связи по скорости,
В;
- напряжение обратной связи по скорости,
В;
 - номинальная
угловая скорость двигателя, с-1.
- номинальная
угловая скорость двигателя, с-1.
На входе регулятора скорости должен быть включен блок деления, аналогично с системами двузонного регулирования скорости двигателя постоянного тока.
Тогда передаточная функция регулятора скорости примет вид:
 ,
(94)
,
(94)
где  - суммарный момент инерции двигателя;
- суммарный момент инерции двигателя;
 ,
(95)
,
(95)
где  - масса ролика;
- масса ролика;
 - диаметр ролика;
- диаметр ролика;
 - коэффициент
обратной связи по току;
- коэффициент
обратной связи по току;
 - номинальное
значение потокосцепления, Вб;
- номинальное
значение потокосцепления, Вб;
- постоянная времени преобразователя частоты, с;
- число пар полюсов двигателя;
 - коэффициент
обратной связи по скорости
- коэффициент
обратной связи по скорости
Если ввести компенсирующие воздействия Uкх и Uку, которые позволяют нивелировать влияние перекрестных обратных связей, качество регулирования улучшится.
При наличии компенсирующих сигналов объект регулирования можно описать следующими функциями:
 =
=
 ;
(96)
;
(96)
 =
=

 ;
(97)
;
(97)
 =
= ;
(98)
;
(98)
 ;
(99)
;
(99)
 =
= .
(100)
.
(100)
В соответствии с уравнениями можно получить упрощенную САР АД, представленную на рисунке 11.

Рисунок 11 - Упрощенная структурная схема объекта регулирования с векторным управлением
Эта система имеет канал регулирования скорости с подчиненным контуром регулирования тока и локальную систему стабилизации потокосцепления ротора, в которой применяется подчиненный контур регулирования тока .
Если использовать компенсационные обратные связи, в системе обеспечивается условие автономии для стабилизации потокосцепления ротора.
Это условие, в свою очередь, позволяет выполнять синтез регулятора потока (РП) и тока РТХ независимо от координат системы стабилизации скорости. Указанные условия автономности применимы также к регуляторам скорости РС и тока РТУ. Также упрощен синтез система, за счёт того, что контуры регулирования токов одинаковы.
Последовательно с регулятором скорости устанавливается блок деления, который нивелирует влияние узла умножения при задании электромагнитного момента. При изменении потокосцепления ротора обеспечивается постоянный передаточный коэффициент разомкнутой системы по скорости.
При таком построении системы регулирования динамические характеристики системы векторного управления частотно-регулируемым электроприводом аналогичны динамическим характеристикам систем управления электроприводами постоянного тока.
Кроме того, использование таких систем связано с использованием сложного ПЧ. Такой ПЧ, как правило, содержит АИ с ШИМ, в котором вентили работают при повышенной частоте коммутации.
Упрощенная схема САР с косвенной ориентацией по вектору потокосцепления ротора представлена на рисунке 12.
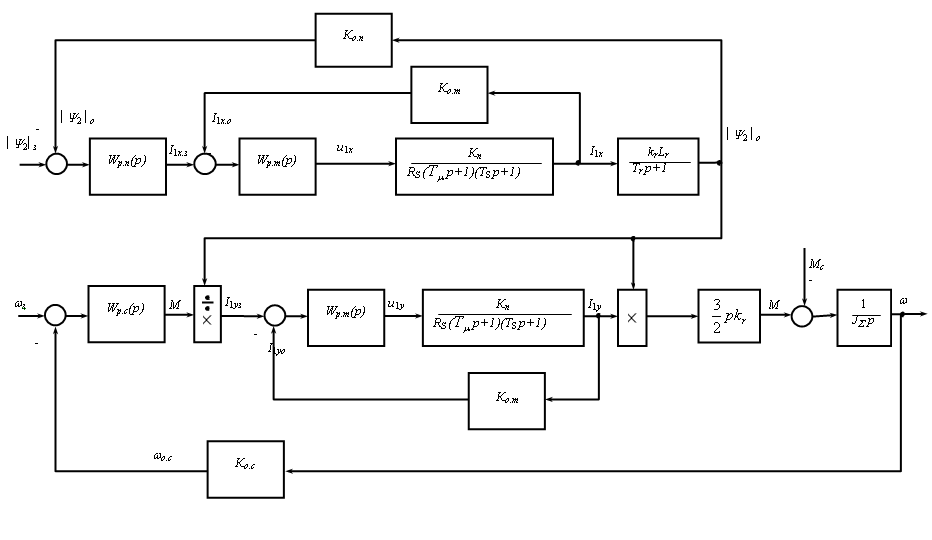
Рисунок 12 – Упрощенная структурная схема системы автоматического регулирования с косвенной ориентацией по вектору потокосцепления ротора