

9.2. Генераторы постоянного тока
9.2.1. Принцип работы гпт
Генератор преобразует механическую энергию первичного двигателя в электрическую энергию. Принцип работы ГПТ основан на явлении электромагнитной индукции. Если посредством первичного двигателя привести якорь машины во вращение с постоянной угловой частотой ω и подать постоянное напряжение в обмотку возбуждения статора (см. рис. 9.1а), то в каждом стержне обмотки якоря будет наводиться ЭДС e1 = Bcpl v, где Bcp = Фp/Sя = = 2pФв/πdl – средняя магнитная индукция в зазоре под полюсом машины, Тл; Sя = πdl – площадь активной части якоря в м2; p – число пар полюсов статора; v = d/2ω = (d/2)2πn/60 = = πdn/60, где l и d – активная длина стержня и диаметр якоря; n и ω – частота вращения вала ГПТ (об/мин) и угловая частота (рад/с) вращения якоря.
После подстановки получим выражение ЭДС якоря
Eя = (N / 2a)e1 = (pN / 60a)nФв = CEnФв,
где CE = pN / 60a – коэффициент ЭДС, определяемый конструктивными особенностями машины; N и 2a – число стержней и число параллельных ветвей якорной обмотки.
Как видно, ЭДС якоря прямо пропорциональна произведению магнитного потока статора Фв на частоту вращения n якоря. Если к зажимам якорной обмотки подключить приёмник R, то ЭДС якоря вызовет в цепи ток Iя = I (рис. 9.3а). Напряжение на зажимах обмотки якоря
9.2.2. Свойства и характеристики генератора независимого возбуждения Свойства генераторов постоянного тока определяются их основными характеристиками: холостого хода, внешней и регулировочной Рассмотрим работу ГПТ независимого возбуждения (рис. 9.3а). Его обмотка возбуждения ОВ подключается к источнику постоянного тока, а к выводам обмотки приведенного во вращение якоря присоединяется нагрузка R. Тогда под действием ЭДС якоря Ея в цепи нагрузки возникает ток I. Проводники с током обмотки якоря находятся в магнитном поле, созданном МДС обмотки возбуждения, поэтому в соответствии с законом Ампера возникают электромагнитные силы и электромагнитный момент Mэм, направленный противоположно моменту приводного двигателя. Таким образом, при работе машины в режиме генератора создаётся противодействующий электромагнитный момент Mэм, который должен быть преодолен первичным двигателем. Недостатком ГПТ независимого возбуждения является потребность в постороннем источнике постоянного напряжения для создания магнитного потока Фв машины. Характеристика холостого хода (ХХ) Eя = Ux = f(Iв) (n = const; I = 0) снимается при разомкнутой цепи приёмника и показывает, как нужно изменять ток возбуждения Iв посредством реостата Rр, чтобы получить те или иные значения ЭДС Eя генератора. Так как при постоянной частоте вращения (n = const) ЭДС якоря прямо пропорциональна магнитному потоку Фв, то характеристика ХХ подобна кривой намагничивания Фв(Iв), называемой магнитной характеристикой машины. Поскольку магнитная цепь машины выполняется из электротехнической стали, являющейся магнитномягким материалом, то характеристика Eя = f{Iв) представляет узкую петлю гистерезиса (рис. 9.3б). При отсутствии тока в обмотке возбуждения (Iв = 0) в якоре (при его вращении) индуктируется небольшая ЭДС Eя0 (равная 13% от напряжения Uн), обусловленная остаточным магнитным потоком Фв0. Важнейшей характеристикой ГПТ является внешняя характеристика U = f(I), представляющая собой зависимость напряжения U на выводах генератора от тока нагрузки I при Iв = const (рис. 9.3в). Внешняя характеристика U = Eя RяIя ГПТ независимого возбуждения жёсткая: напряжение U незначительно (на 610% от Eя при I = Iн) уменьшается с ростом тока нагрузки I из-за падения напряжения в цепи якоря и реакции якоря – воздействия магнитного поля якоря Фя, создаваемого МДС обмотки якоря Fя = wя Iя, на основной магнитный поток Фв машины, которое вызывает искажение магнитного потока Фв статора и, в конечном итоге, уменьшение ЭДС Ея якорной обмотки. При КЗ во внешней цепи ток якоря Iк = Iяк превышает номинальный ток Iян в десятки раз. Такой ток недопустим для коллектора, щёток и обмотки якоря. Поэтому ГПТ защищают от токов КЗ быстродействующими реле и контактором. Допустимая кратковременная (несколько секунд) перегрузка ГПТ током: I = (22,5)Iн. Регулировочной характеристикой называют характеристику Iв = f(I) (рис. 9.3г) при n = = сonst и U = const. Она показывает, как следует изменять ток возбуждения, чтобы поддерживать постоянным напряжение U генератора при изменении нагрузки (тока I). Как следует из рис. 9.3а и б для стабилизации напряжения U необходимо соответствующим образом изменять ЭДС Ея якоря путём изменения тока Iв. Поскольку напряжение генератора снижается при увеличении нагрузки, ток возбуждения необходимо увеличивать. 9.3. Свойства и характеристики ГПТ с самовозбуждением Для возбуждения ГПТ с самовозбуждением необходимо: • наличие остаточного магнитного потока Фв0 полюсов машины, • согласное включение обмотки возбуждения с остаточным магнитным потоком Фв0, • иметь сопротивление цепи возбуждения, меньшее так называемого критического сопротивления Rв.кр, т.е. Rв < Rв.кр. 
Рассмотрим процесс самовозбуждения ГПТ параллельного возбуждения (рис. 9.4а). В режиме ХХ (Eя = f(Iв)) ток во внешней цепи I = 0, а в обмотке возбуждения и в обмотке якоря протекает небольшой ток, обусловленный остаточной ЭДС якоря Еяо (рис. 9.4б). Если обмотка ОВ подключена к цепи якоря таким образом, что создаваемый её МДС магнитный поток совпадает по направлению с остаточным магнитным потоком, то ЭДС якоря (соответственно магнитный поток Фв и ток Iв обмотки возбуждения) будет возрастать. Процесс самовозбуждения генератора заканчивается, когда падение напряжения на обмотке ОВ станет равным ЭДС якоря, т.е. Ея = RвIв (точка A, рис. 9.4б). Если увеличивать сопротивление цепи возбуждения (посредством реостата Rр, (см. рис. 9.4a), то точка А пересечения прямой RвIв с характеристикой Eя(Iв) сместиться влево (рис. 9.4б). При достижении значения сопротивления Rв.кр цепи возбуждения, называемого критическим, напряжение U на зажимах генератора будет неустойчивым, практически не превышающим ЭДС Еяо. Поэтому сопротивление цепи возбуждения Rв генератора должно быть меньше критического значения сопротивления Rв.кр. Генераторы последовательного возбуждения не нашли широкого применения из-за непостоянства выходного напряжения, поэтому их характеристики не рассматриваются.
Внешняя
(вольтамперная)
характеристика
ГПТ параллельного возбуждения U
= f(I),
т.е.
U
= Ея
– RяIя,
где Iя
= I
+ Iв
–
ток якорной обмотки, отличается более
резким падением напряжения (рис.
9.4в)
при увеличении тока I
нагрузки
(на 1020
% от Е Причинами падения напряжения U являются: • увеличение падения напряжения RяIя в цепи якоря; • реакция якоря; • уменьшение тока возбуждения Iв = U / Rв, вызванное первыми двумя причинами, приведшими к снижению напряжения U на зажимах обмотки ОВ. У генераторов параллельного возбуждения при уменьшении сопротивления R нагрузки ток I увеличивается до определённого предела, называемого критическим Iкр = (1,52,5)Iн. При дальнейшем уменьшении сопротивления R ток I уменьшается вследствие размагничивания машины (уменьшения тока возбуждения). При КЗ машина будет полностью размагничена, поэтому ток КЗ Iк обычно невелик (определяется небольшой остаточной ЭДС (Iк = Еяо / Rя)). Однако при внезапном КЗ вследствие медленного изменения магнитного потока и ЭДС якоря ток I в переходном режиме может превысить номинальное значение в несколько раз, что может вызвать перегрев щеточно-коллекторного узла. Поэтому в цепь управления этих генераторов включают реле, которое отключает цепь якоря в случае, если ток якоря превысит установленное значение. Регулировочная характеристика Iв = f(I) при n = const и U = const имеет такой же вид (рис. 9.4г), как регулировочная характеристика ГПТ независимого возбуждения, однако проходит круче, так как, чтобы скомпенсировать большее снижения напряжения, необходимо увеличивать ток возбуждения в большей степени. При встречном включении обмоток возбуждения при увеличении тока нагрузки напряжение на выходе генератора резко падает (кривая 2, рис. 9.5б). Такую вольтамперную характеристику, называемую крутопадающей, имеют генераторы для дуговой сварки (типа ПСО-300 и ПСГ-500), обеспечивающие постоянство тока при колебаниях сопротивления цепи вследствие изменения длины электрической дуги. 9.3. ДВИГАТЕЛИ ПОСТОЯННОГО ТОКА
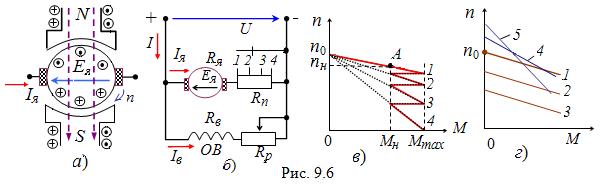
9.3.3. Противо-ЭДС и баланс мощностей цепи якоря ДПТ Если вращающий момент М больше момента сопротивления Mс механизма на валу, т.е. M > Mс, то якорь начинает вращаться. Однако при вращении якоря его проводники пересекают магнитный поток Фв и, согласно закону электромагнитной индукции, в них индуктируется ЭДС. Суммарную ЭДС всех проводников якорной обмотки называют противо-ЭДС, так как направление ЭДС противоположно направлению тока якоря Iя (см. рис. 9.6б). Уравнение электрического равновесия для якорной обмотки выглядит следующим образом: U = Eя + RяIя, где U − напряжение на зажимах якорной обмотки. Умножив члены последнего уравнения на ток Iя, получим уравнение баланса мощностей цепи якоря ДПТ: Рэ = UIя = EяIя + Rя(Iя)2, которое показывает, что электрическая мощность Рэ, подводимая к якорю двигателя из сети, преобразуется в электромагнитную мощность Рэм = = EяIя = М/ω и мощность электрических потерь ΔРя = Rя(Iя)2 в обмотке якоря. 9.3.4. Классификация ДПТ по способу возбуждения ДПТ классифицируют по способу возбуждения: • независимое, • параллельное (шунтовое), • последовательное (сериесное) и • смешанное (сериесно-шунтовое или компаундное). |
||||
В ДПТ параллельного возбуждения обмотка ОВ подключена параллельно с обмоткой якоря к сети (рис. 9.6б). В цепь ОВ включен регулировочный реостат с сопротивлением Rр, а в цепь якоря – пусковой реостат с сопротивлением Rn. В ДПТ параллельного возбуждения ток возбуждения Iв = U/(Rв + Rp), Ток якоря Iя = (U – Eя/Rя = (U – CEnФв)/Rя, где U – напряжение, подводимое к электродвигателю; Rя – сопротивление цепи якоря. В начальный момент пуска ДПТ частота вращения якоря n = 0, поэтому противо-ЭДС Ея = = 0. Напомним, что пуском называют процесс разгона якоря от неподвижного состояния до установившегося значения частоты вращения якоря, когда вращающий электромагнитный момент М двигателя равен моменту сопротивления механизма на валу – моменту нагрузки Мс, т.е. М = Мс. В процессе пуска вращающий момент должен быть больше момента нагрузки (М > Мс). Чтобы ограничить недопустимо большой пусковой ток Iяп = U/Rя в обмотке якоря и, как следствие, возникающий рывок или удар на валу и искрение в контактах щётки-коллектор, последовательно с якорем включают пусковой реостат Rп (рис. 9.6б), сопротивление кoторого рассчитывают из условия, чтобы пусковой ток Iяп = U/(Rя + Rп) ≤ (22,5)Iян, где Iян – номинальный ток якоря.
При
этом двигатель
развивает достаточно большой пусковой
момент Мп
= (24)Мн.
Это обеспечивает быстрый разгон
механизма на валу. По мере разгона
двигателя
ЭДС
якоря Е 9.3.5. Скоростная и механические характеристики ДПТ параллельного возбуждения Электромеханические свойства ДПТ определяются его скоростной n(Iя) или механической n(M) характеристиками. Скоростная характеристика представляет зависимость частоты вращения n от тока якоря Iя при U = const и Iв = const. Уравнение естественной скоростной характеристики получают из рассмотренного выше выражeния n = (U – RяIя)/(CЕФв) = (U/CЕФв) – (Rя/CЕФв)Iя. Механическая характеристика n(M) представляет зависимость частоты вращения якоря n от развиваемого ДПТ момента М = Мс при условии постоянства напряжения U сети и сопротивлений в цепи якоря и в цепи возбуждения. Заменив ток Iя в выражении скоростной характеристики значением из выражения вращающего момента М = СMIяФв, получим уравнение естественной механической характеристики (кривая 1, рис. 9.6в) n = (U/CЕФв) – (Rя/СЕФвСМФв)M = n0 – Δn, где n0 = U/CEФв – частота вращения якоря при "идеальном" ХХ (Мс = 0) и сопротивлениях Rп = 0 и Rр = 0, а также при напряжении на якоре U = Uн и магнитный поток двигателя Фв = = Фвн. Естественная механическая характеристика n(M) ДПТ параллельного возбуждения является жесткой, так как снижение частоты вращения Δn при моменте сопротивления на валу М = Мсн составляет (37)% от n0. Если сопротивление пускового реостата Rп > 0 (Rр = 0), получают искусственные, так называемые реостатные механические характеристики 24 (рис. 9.6в), проходящие через точку n0 – частоту вращения ХХ двигателя. Чем больше сопротивление Rп, тем характеристика круче. 9.3.6. Пуск ДПТ параллельного возбуждения Прямой пуск двигателя (Rп = 0) применяют только для двигателей малой мощности (до 1 кВт), у которых сопротивление якорной цепи относительно велико и обмотка якоря не успевает нагреться. Пуск двигателя с использованием пускового реостата называют реостатным. Перед пуском для получения максимального пускового момента при допустимом пусковом токе регулировочный реостат в обмотке возбуждения полностью выводят (Rр = 0, при этом магнитный поток Фв имеет максимальное значение), а рукоятку переключателя пускового реостата устанавливают в положение 4 при наличии трёх ступеней реостата, (см. рис. 9.6б), при котором сопротивление Rп имеет максимальное значение. В начальный период пуск осуществляется по реостатной характеристике 4 (рис. 9.6в); при этом двигатель развивает максимальный пусковой момент. По мере разгона сопротивление пускового реостата Rп ступенчато уменьшают; разгон двигателя осуществляется по отдельным отрезкам реостатных характеристик 4, 3 и 2 (см. жирные линии на рис. 9.6, в). При полностью выведенном сопротивлении Rп и достижении значения М = Мн частота вращения n якоря устанавливается на естественной мехaнической характеристике 1 (точка А). При пуске двигателей большой мощности использование пускового реостата (из-за его громоздкости и значительных потерь энергии) становится неэффективным. В этом случае применяют безреостатный пуск при пониженном напряжении, подводимом к цепи якоря. Получаемые (при условии, что Rп = 0 и Rр = 0) искусственные механические характеристики имеют вид 2 и 3 (рис. 9.6г) и проходят параллельно естественной 1 и тем ниже, чем меньше величина напряжения U. Регулировочный реостат Rр позволяет изменять ток возбуждения Iв двигателя и его магнитный поток Фв. При этом будет изменяться и частота вращения якоря n. При номинальном напряжении на якоре (Rп = 0) и уменьшении магнитного потока (Rр > 0) механические характеристики имеют вид 4 и 5 (рис. 9.6г) и проходят тем выше естественной 1 и круче её, чем меньше магнитный поток. 9.3.7. Способы регулирования частоты вращения и реверсирование ДПТ параллельного возбуждения Из рассмотрения механических характеристик двигателя следует, что при моменте М = = Мс = const частоту вращения якоря n = U/(CEФв) – M(Rя + Rn)/(CECMФв2) = n0 – Δn можно регулировать тремя способами: • реостатным – изменением сопротивления цепи якоря (Rя + Rп = var); • полюсным – изменением магнитного потока полюсов (Rв + Rр = var); • якорным – изменением напряжения, подводимого к якорю (U = var). Реверсирование ДПТ можно обеспечить изменением направления тока или в обмотке якоря, или в обмотке возбуждения. 9.3.7. Рабочие характеристики ДПТ параллельного возбуждения
На
рис. 9.7 изображены рабочие характеристики
рассматриваемого двигателя. Они
п Характеристики n(P2) и M(P2) являются практически линейными, а зависимости P1(P2), Iя(P2) и η(P2) имеют характер, общий для всех электрических машин. Иногда рабочие характеристики строят в зависимости от тока якоря Iя. Для двигателя параллельного возбуждения моментная характеристика М(Iя) при U = const и Фв = const представляется в виде прямой, проходящей через начало координат. Механические и рабочие характеристики ДПТ независимого возбуждения аналогичны характеристикам ДПТ параллельного возбуждения, так как у них ток возбуждения Iв также не зависит от тока якоря Iя. 9.3.7. Свойства и характеристики ДПТ последовательного возбуждения
При токе якоря Iя < (0,80,9)Iян, когда магнитная система машины не насыщена, магнитный поток Фв = kфIя. При дальнейшем возрастании тока якоря поток Фв растёт медленнее, чем ток Iя, и при больших нагрузках (Iя > Iян) можно считать, что поток Фв ≈ const. В соответствии с этим изменяются зависимости n = f(Iя) и M = f(Iя)
Поэтому частота вращения n будет снижаться с ростом магнитного потока в бoльшей степени по сравнению с частотой вращения ДПТ параллельного возбуждения (см. участок аb кривой 1 на рис. 9.8б), т.е. ДПТ последовательного возбуждения имеет более мягкую механическую характеристику по сравнению с механической характеристикой ДПТ параллельного возбуждения. Зависимость M = f(Iя) на участке аb (рис. 9,8в) – параболического типа, что создаёт большой пусковой момент при разгоне механизма. При небольших нагрузках (М < Мн/4) частота вращения n резко возрастает, как говорят, двигатель идёт в "разнос", что опасно с точки зрения механической прочности якоря. В виду этого нельзя допускать работу ДПТ последовательного возбуждения при ХХ и при малых нагрузках.
т.е. по мере насыщения магнитной системы машины жёсткость механической характеристики n = f(М) возрастает, а гиперболическая зависимость M = f(Iя) переходит в наклонную прямую (см. рис. 9.8б и в). При пуске с реостатом Rп, ограничивающим пусковой ток и момент до допустимых значений Iп и Mп, характеристика n = f(М) проходит ниже характеристики 1 (см. кривую 2 на рис. 9.8б). Несмотря на указанные недостатки, ДПТ последовательного возбуждения широко применяются в различных электрических приводах, особенно там, где имеет место изменение нагрузочного момента Мс в широких пределах и тяжелые условия пуска (грузоподъёмные и поворотные механизмы, тяговый привод и др.). 9.3.8. Свойства и характеристики ДПТ смешанного возбуждения
В
ДПТ смешаного возбуждения магнитный
поток создаётся в результате совместного
действия МДС двух обмоток возбуждения
– параллельной и последовательной
(рис.
9.9а).
Поэтому
механическая
характеристика 1
(рис.
9.9б)
ДПТ
смешанного возбуждения располагается
между характеристиками ДПТ
последовательного (кривая
2)
и
параллельного ( В зависимости от соотношения МДС последовательной и параллельной обмоток возбуждения характеристики n = f(М) и M = f(Iя) ДПТ смешанного возбуждения при номинальном режиме можно приблизить к характеристике 2 (при малой МДС параллельной обмотки) или к характеристике 3 (при малой МДС последовательной обмотки). Одним из достоинств ДПТ смешанного возбуждения является то, что он, обладая мягкой механической характеристикой при небольших нагрузках на валу, может работать при ХХ, так как его частота вращения n0 при ХХ имеет конечное значение. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. Изобразите схематически устройство МПТ. 2. Объясните принцип работы ГПТ. 3. Объясните устройство и назначение коллектора. 4. Напишите формулу ЭДС и формулу электромагнитного момента МПТ. 5. Изобразите схемы генераторов независимого, параллельного и смешанного возбуждения; покажите на них направления токов и ЭДС. 6. Объясните процесс самовозбуждения ГПТ. 7. Сравните внешние характеристики различных типов генераторов. 8. Выведите уравнение механической характеристики ДПТ. 9. Изобразите схемы двигателей параллельного, последовательного и смешанного возбуждения; покажите на них направления токов и ЭДС 10. Перечислите способы пуска ДПТ. 11. Изобразите и объясните реостатные механические характеристики двигателя параллельного и последовательного возбуждения. 12. В каком случае возможен "разнос" ДПТ. 13. Перечислите способы регулирования частоты вращения двигателя параллельного возбуждения и укажите их достоинства и недостатки. 14. Какие двигатели (с какой системой возбуждения) применяются в приводах электротранспорта. 15. Начертите схему универсального коллекторного двигателя и назовите области его применения. 16. Перечислите достоинства и недостатки микродвигателя с дисковым якорем. 17. Покажите выходные характеристики тахогенератора постоянного тока. 18. Изобразите эскиз устройства микродвигателя постоянного тока с полым якорем. 19. Начертите схему электромашинного усилителя с поперечным полем и объясните принцип его действия.
|
||||
|
||||
 U
= Eя
– RяIя
= СEФвn
– RяIя,
где Rя
и Iя
– сопротивление цепи и ток якоря.
U
= Eя
– RяIя
= СEФвn
– RяIя,
где Rя
и Iя
– сопротивление цепи и ток якоря. У
ГПТ смешанного
возбуждения (рис.
9.5а)
при согласном включении
последовательной
и параллельной обмоток возбуждения
их магнитные потоки складываются,
и дополнительная ЭДС, обусловленная
магнитным потоком последовательной
обмотки, компенсирует падение
напряжения в обмотке якоря и уменьшение
ЭДС
Ея
от
снижения тока возбуждения. В этом
случае при изменении тока
нагрузки
I
напряжение
U
остаётся практически постоянным
(кривая
1,
рис. 9.5б).
У
ГПТ смешанного
возбуждения (рис.
9.5а)
при согласном включении
последовательной
и параллельной обмоток возбуждения
их магнитные потоки складываются,
и дополнительная ЭДС, обусловленная
магнитным потоком последовательной
обмотки, компенсирует падение
напряжения в обмотке якоря и уменьшение
ЭДС
Ея
от
снижения тока возбуждения. В этом
случае при изменении тока
нагрузки
I
напряжение
U
остаётся практически постоянным
(кривая
1,
рис. 9.5б).
 ёточно-коллекторный
узел выполняет
роль механического переключателя
тока, обеспечивая неизменность
направления токов в проводниках ОЯ,
проходящих под соответствующим
магнитным полюсом (N
или S)
индуктора, и изменение направления
токов в этих проводниках при
пересечении ими так называемой
геометрической
нейтрали (нейтралей)
машины: для двухполюсной машины
нейтраль совпадает с горизонтальной
осью (рис.
9.6а),
а для многополюсной − геометрические
нейтрали проводят через центр и
между полюсами N
и S,
где расположены щётки.
ёточно-коллекторный
узел выполняет
роль механического переключателя
тока, обеспечивая неизменность
направления токов в проводниках ОЯ,
проходящих под соответствующим
магнитным полюсом (N
или S)
индуктора, и изменение направления
токов в этих проводниках при
пересечении ими так называемой
геометрической
нейтрали (нейтралей)
машины: для двухполюсной машины
нейтраль совпадает с горизонтальной
осью (рис.
9.6а),
а для многополюсной − геометрические
нейтрали проводят через центр и
между полюсами N
и S,
где расположены щётки.
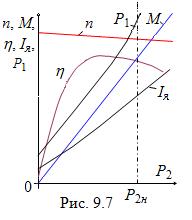 редставляют
собой зависимости потребляемой
мощности P1,
тока Iя,
частоты вращения n,
мoмента M
и
КПД η
от отдаваемой мощности P2
на валу
двигателя при U
= const и
Iв
= const.
редставляют
собой зависимости потребляемой
мощности P1,
тока Iя,
частоты вращения n,
мoмента M
и
КПД η
от отдаваемой мощности P2
на валу
двигателя при U
= const и
Iв
= const.
 В
ДПТ последовательного
возбуждения (рис.
9.8a)
ток
возбуждения Iв
= Iя
=
I,
поэтому магнитный поток Фв
является функцией тока якоря Iя.
Характер этой зависимости изменяется
в зависимости от нагрузки двигателя.
В
ДПТ последовательного
возбуждения (рис.
9.8a)
ток
возбуждения Iв
= Iя
=
I,
поэтому магнитный поток Фв
является функцией тока якоря Iя.
Характер этой зависимости изменяется
в зависимости от нагрузки двигателя. При
токе
якоря Iя
< (0,80,9)Iян
При
токе
якоря Iя
< (0,80,9)Iян
 При
токе Iя
> 0,9Iян
частота вращения
При
токе Iя
> 0,9Iян
частота вращения
 кривая
3)
возбуждения.
кривая
3)
возбуждения.