

4895
.pdfМИНИСТЕРСТВО ОБРАЗОВАНИЯ РФ
Воронежская государственная лесотехническая академия
П Р И К Л А Д Н А Я М Е Х А Н И К А
Методические указания к лабораторным работам для студентов специальности 240400 – Организация и безопасность движения
Воронеж 2002
2
УДК 621.01 Карамышев Е.В., Бартенев И.М., Карамышев В.Р. Прикладная механи-
ка: Методические указания к лабораторным работам для студентов специальности 240400 – Организация и безопасность движения.
Печатается по решению редакциионно-издательского совета ВГЛТА
Рецензент канд. техн. наук, доцент Е.М. Попов
3
ЛАБОРАТОРНАЯ РАБОТА № 1
ОПРЕДЕЛЕНИЕ МОМЕНТОВ ИНЕРЦИИ ЗВЕНЬЕВ МЕХАНИЗМА
Цель работы – овладение навыками экспериментального определения центра масс и момента инерции звена.
Оборудование
Для выполнения работы необходимы: прибор ТММ-25 или призма на опоре, секундомер, рычажные весы и набор подставок с призмами, измерительная линейка, испытуемое звено.
Общие и теоретические сведения
При решении многих задач динамики механизмов нужно учитывать механические параметры звеньев: массу m каждого звена, положение центра масс C и момент инерции I .
Масса служит мерой инертности звена при поступательном движении. От характера геометрического размещения массы в звене зависит положение центра масс. Момент инерции служит мерой инертности звена во вращательном движении. Он одновременно учитывает и величину массы и закономерность её расположения в звене. Роль момента инерции во вращательном движении аналогична роли массы в поступательном движении.
Для уяснения момента инерции рассмотрим вращение звена вокруг некоторой оси О с угловой скоростью ω. Обозначим массу элементарной частицы mi , а её линейную (окружную) скорость -νi .
Кинетическая энергия звена будет равна сумме кинетических энергий всех его частиц:
E = ∑ |
mυ 2 |
(1.1) |
|
i i |
|||
2 |
|||
|
|
Принимая во внимание, что νi = ωri , где ri – расстояние элементарной частицы от оси вращения, получим
Е = |
ω2 |
∑m r2 |
(1.2) |
|
|||
|
2 |
i i |
|
|
|
|
В этой формуле величина ∑miri2 называется моментом инерции звена относительно оси О
I o= ∑miri2 . |
(1.3) |
Таким образом, момент инерции звена относительно некоторой оси представляет собой сумму произведений масс всех частиц звена, на квадраты их расстояний до этой оси.
В случае сплошного тела момент инерции выражается интегралом
I o = ∫ r2dm , |
(1.4) |
где интегрирование должно распространяться по всей массе звена.
Моменты инерции измеряются положительными числами с размерностью кг м2.
4
Отношение Io/m имеет размерность квадрата длины и обозначается через ρо2 .
Величина ρо называется радиусом инерции звена относительно той же оси О, для которой определён I o .
В практике обычно имеют дело с плоским движением звеньев. Поэтому важно знать момент инерции относительно оси, перпендикулярной к плоскости движения звена. Часто в расчётах эта ось является центральной, т.е. она проходит через центр масс С звена. Связь между моментами инерции относительно параллельных осей, одна из которых центральная,
устанавливается теоремой Гюйгенса: |
|
Io = Ic+ml2 , |
(1.5) |
где Io – момент инерции относительно некоторой оси О; |
|
Ic – центральный момент инерции; |
|
l - рассояние от центра масс С до оси О. |
|
Из теоремы Гюйгенса следует, что центральный момент инерции звена |
|
всегда меньше момента инерции относительно |
любой другой параллельной |
оси. |
|
Механические параметры звеньев могут определяться как расчётным путём, так и экспериментально. Расчётный способ применяется для звеньев, представляющих собой однородные тела простой формы. В случае неоднородных тел и тел, имеющих сложные геометрические формы, определение механических параметров производится экспериментально.
Определение массы звена Массу звена можно определить путём взвешивания на рычажных весах
различных конструкций: десятичных, чашечных, аналитических, и др. Определение центра масс звена
В зависимости от формы и размеров звеньев используются различные методы экспериментального определения центра масс. Рассмотрим некоторые из этих методов, применяемых к звеньям симметричной формы.
1.Определение центра масс на призме (рис.1.1, а). Звено укладывают на горизонтальное ребро призмы так, чтобы оно находилось в равновесии. Точки касания звена с призмой отмечают и соединяют прямой линией. Точка пересечения этой линии с осью симметрии звена будет совпадать с центром масс.
2.Определение центра масс с помощью отвеса (рис.1.1,б). Звено подвешивают на одной нити, прикреплённой к двум концам звена. В точке подвеса укрепляют отвес. Центр масс будет находиться на пересечении линии отвеса с осью симметрии звена.
3.Метод реакций (рис.1.1,в). Звено устанавливают на две призмы, одна из которых находится на чашке весов, а другая , регулируемая по высоте, на неподвижном основании. Вторую чашку весов уравновешивают гирями. По
весу гирь определяют реакцию RА. Из условия равновесия звена можно определить координату b центра масс:
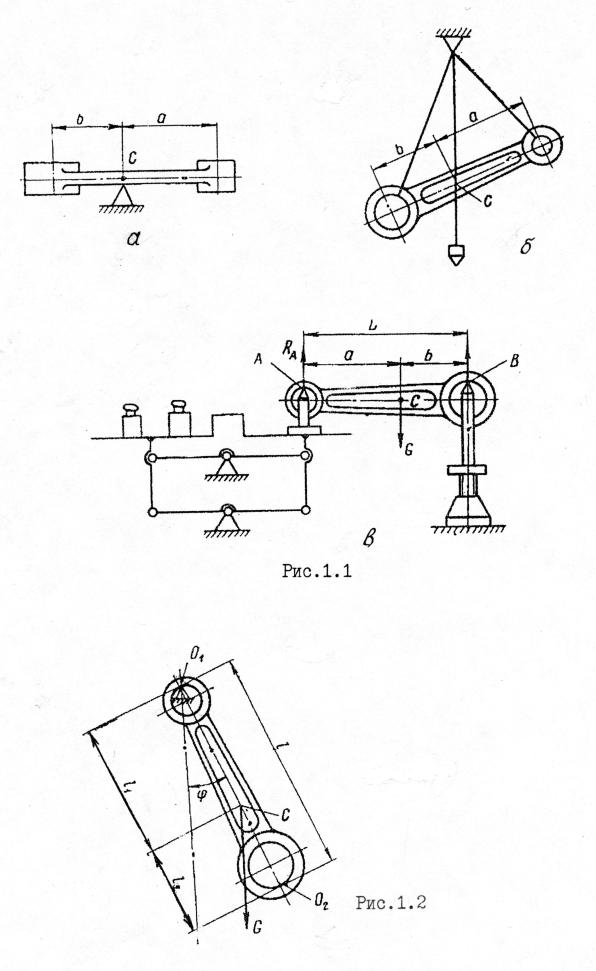
5

6 |
|
b = RA L, |
(1.6) |
G
где G – вес звена;
L – расстояние между опорами звена.
4. Метод двукратного покачивания. Сущность этого метода заключается в определении центра масс и момента инерции звена методом физического маятника.
Метод физического маятника применяют к таким звеньям, которые можно попеременно подвешивать за две точки, расположенные на продольной оси симметрии звена по обе стороны от центра масс (шатуны, кривошипы, рычаги и т.п.) и периода колебаний.
Испытуемое тело подвешивают на горизонтальном ребре неподвижной призмы (рис.1.2) и сообщают ему малые колебания. В этом случае звено представляет собой физический маятник с осью вращения О1 , называемой осью подвеса. Если пренебречь трением в опоре О1 и сопротивлением возду-
ха, то уравнение движения физического маятника можно записать как |
(1.7) |
I1ϕ + mgl1 sinϕ = 0 , |
&&
где I1 – момент инерции звена относительно оси подвеса О1;
ϕ - угол отклонения оси симметрии звена от вертикали, град.; m – масса звена, кг.;
g – ускорение силы тяжести, м/с2;
l1 – расстояние от центра масс до оси подвеса О1 , м.
При малых колебаниях sinϕ можно выразить через ϕ. Тогда получим
|
ϕ.. + |
mgl1 |
ϕ = 0 |
(1.8) |
||||||||||||
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
I1 |
|
|
|
|
|
|
|
|
||
Введя обозначение |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
mgl1 |
= k2 , |
(1.9) |
||||||||||||
|
|
|
|
|
|
|||||||||||
|
|
|
I1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
придём к уравнению |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
&& |
ϕ = 0. |
(1.10) |
||||||||||||||
ϕ |
+ k |
|||||||||||||||
Это однородное линейное дифференциальное уравнение с постоянны- |
||||||||||||||||
ми коэффициентами описывает гармонические колебания с частотой |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
K = |
|
mgl |
1 |
|
|
|
|
|
|
(1.11) |
|||||
|
|
|
I1 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
и периодом колебаний |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2π |
|
|
|
|
|
|
|
|
|
|||||
Т1 |
= |
= 2π |
|
|
|
|
I1 |
. |
(1.12) |
|||||||
|
|
|
|
|||||||||||||
|
|
|
k |
|
|
|
|
|
|
|
|
mgl1 |
|
|||
7
Из последнего выражения находим
I1 = |
T 2 |
mgl1 . |
(1.13) |
|
1 |
||||
4π 2 |
||||
|
|
|
Для определения центрального момента инерции Iс , используя формулу Гюйгенса, получаем
Iс = I1- ml12 = ml1 |
|
T12 |
g − l |
|
. |
(1.14) |
|
|
1 |
||||||
|
|
4π |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
Уравнение является расчётным для определения центрального момента инерции испытуемого звена. Величины m, Т1 и l1 находятся экспериментально. Если расстояние l1 неизвестно и не может быть измерено, то для его определения проводят ещё один опыт. Звено подвешивают за другую точку подвеса О2 и замеряют период колебаний Т2 . Момент инерции l2 звена относительно новой оси подвеса О2 найдём по формулe, аналогичной (1.13):
|
|
= |
T 2 |
mgl2 , |
(1.15) |
|
I |
|
2 |
||||
2 |
4π 2 |
|||||
|
|
|
|
и получим другое выражение для центрального момента инерции звена
Iс = I2- ml22 = ml2 |
|
T22 |
g − l |
. |
(1.16) |
|
|
||||||
|
|
4π |
2 |
|
2 |
|
|
|
|
|
|
|
|
В этих уравнениях величина l2 обозначает расстояние от центра масс до оси подвеса О2 .
Вводя обозначение l1 + l2 = l и решая совместно полученные уравнения относительно координаты l1 центра масс, получаем:
l1 = l |
4π 2l −T 2 g |
. |
(1.17) |
||
|
2 |
|
|||
|
|
|
|
|
|
|
8π 2l − (T 2 |
+ T |
2 )g |
|
|
|
1 |
|
2 |
|
|
Следует отметить, что у физического маятника изохронными являются только малые колебания. Поэтому при экспериментальном определении
периодов колебаний звено должно отклоняться от вертикали на угол не более 5…10о .
Порядок выполнения работы
1.Определить на весах массу m испытуемого звена.
2.Подвешивая звено на призме сначала за одну, затем за другую точку
подвеса, определить периоды полных колебаний Т1 и Т2 . При колебании звено должно отклоняться от вертикального положения на угол 5…10о (в приборе ТММ-25 – в пределах клиновидной планки). Период колебаний (время двойного размаха звена) определяется секундомером как среднее из 20 колебаний. Опыт повторить три раза.
8
3.Измерить расстояние l между точками подвеса и по формуле (3) определить положение центра масс звена. Проверить положение центра масс звена одним из изложенных выше методов.
4.Определить по формуле (1) момент инерции звена I1 относительно
оси О1.
5. Определить по формуле (2) центральный момент инерции звена Ic.
Оформление отчёта
1. |
Схема установки |
|
|
|
2. |
Масса испытуемого звена m, кг. |
|
||
3. |
Расстояние между осями подвеса О1 и О2 , l, м. |
|||
4. |
Таблица наблюдений |
|
|
|
Номер |
Период коле- |
Номер |
Период коле- |
|
Опыта |
баний Т1, с |
Опыта |
баний Т2, с |
|
1 |
|
1 |
|
|
2 |
|
2 |
|
|
3 |
|
3 |
|
|
|
|
(Среднее) |
|
(Среднее) |
5. |
Определение координаты центра масс l1 , м; |
|
||
6. |
Определение моментов инерции звена I1, кгм2 и I2, , кгм2. |
|||
Контрольные вопросы
1.Какие свойства тела характеризуют момент инерции ?
2.От каких параметров зависит величина момента инерции ?
3.Может ли одно и то же тело обладать несколькими значениями массы, моментов инерции ?
4.Относительно какой оси момент инерции звена является наимень-
шим ?
5.Может ли тело большой массы обладать меньшим моментом инерции, чем тело с меньшей массой ? Если да то в каком случае?
6.Можно ли при определении момента инерции считать, что вся масса звена сосредоточена в его центре масс подобно тому, как это делается при определении равнодействующей сил массы и главного вектора сил инерции ?
9
ЛАБОРАТОРНАЯ РАБОТА № 2
ОПРЕДЕЛЕНИЕ КОЭФФИЦИЕНТА ПОЛЕЗНОГО ДЕЙСТВИЯ ЧЕРВЯЧНОГО РЕДУКТОРА
1. Цель работы и общие сведения Целью работы являются теоретическое и экспериментальное
определение коэффициента полезного действия (КПД) червячного редуктора. Теоретически коэффициент полезного действия закрытой червячной
передачи (редуктора) определяется выражением
η=η1η2η3 , |
(2.1) |
где η1 – коэффициент, учитывающий потери в опорах и муфте; η2 – коэффициент, учитывающий потери на перемешивание и
разбрызгивание масла; η3 – коэффициент, учитывающий потери в зацеплении.
Приближённо произведение η1η2 учитывают множителем (0,91…0,97), где меньшие значения соответствуют подшипникам скольжения и значительной вязкости масла. Для испытываемого редуктора η1η2 = 0,95…0,97.
При ведущем червяке потери в зацеплении определяются по аналогии винт-гайка, т.е.
η3= |
tgγ w |
, |
(2.2) |
||
tg(γ |
w |
+ϕ / ) |
|||
|
|
|
|
|
|
где γw – угол подъёма линии винта червяка по начальному цилиндру; ϕ′ - приведённый угол трения;
Величина угла
|
|
γw = arctg |
z1 |
, |
|
|
(2.3) |
|
|
q + 2x |
|
|
|||
|
|
|
|
|
|
|
|
где Ζ1 – число заходов червяка; |
|
|
|
|
|||
q – коэффициент диаметра червяка; |
|
|
|
|
|||
x – коэффициент смещения. |
|
|
|
|
|||
Значение |
η3 |
увеличивается |
с |
ростом |
угла |
подъёма |
|
γw , т.е. с увеличением числа заходов Ζ1 ( см. формулу2.3). Однако увеличение Ζ1 нежелательно, так как это уменьшает передаточное число редуктора.
Приведённый угол трения |
|
ϕ′ = arctg ƒ, |
(2.4) |
где ƒ - коэффициент трения в зацеплении, величина которого зависит от скорости скольжения материалов пары (колесо-червяк, твёрдости и чистоты активных поверхностей, зацепления, качества смазки и ряда других факторов. Однако решающее значение имеет скорость скольжения

10
Vs = |
πm(q + 2x)n1 |
м/с, |
(2.5) |
60 1000 cosγw |
где m – модуль зацепления, мм;
n – частота вращения червяка, мин –1.
При известной Vs значения ƒ и ϕ′ определяются по табл. 2.1 (меньшие значения соответствуют твёрдым шлифованным и полированным
червякам). |
|
|
|
|
|
|
|
Таблица 2.1 |
|
|
Значения параметров |
|
|
|
Vs, м/с |
ƒ |
|
ϕ′ |
|
0,01 |
0,11…0,12 |
|
6017′…6051′ |
|
|
|
|
|
|
0,1 |
0,08…0,09 |
|
4034′…5009′ |
|
|
|
|
|
|
0,25 |
0,065…0,075 |
|
3043′…4017′ |
|
|
|
|
|
|
0,5 |
0,055…0,065 |
|
3009′…3043′ |
|
|
|
|
|
|
1 |
0,045…0,055 |
|
2035′…3009′ |
|
|
|
|
|
|
1,5 |
0,04…0,05 |
|
2017′…2052′ |
|
|
|
|
|
|
2 |
0,035…0,045 |
|
2000′…2035′ |
|
|
|
|
|
|
2,5 |
0,03…0,04 |
|
1043′…2017′ |
|
|
|
|
|
|
3 |
0,028…0,035 |
|
1036′…2000′ |
|
|
|
|
|
|
4 |
0,023…0,03 |
|
1026′…1043′ |
|
|
|
|
|
|
7 |
0,018…0,026 |
|
1002′…1029′ |
|
|
|
|
|
|
10 |
0,016…0,024 |
|
0055′…1022′ |
|
|
|
|
|
|
15 |
0,014…0,020 |
|
0048′…1009′ |
|
|
|
|
|
|
Из табл. 2.1 видно, что с увеличением Vs значения ƒ и ϕ′ уменьшаются, что увеличивает КПД. Это обьясняется тем, что повышение Vs приводит к постепенному переходу от режимов полусухого и полужидкостного трения к жидкостному.
Экспериментальное значение КПД редуктора определяется по формуле