

4395
.pdf11
где τ – время запаздывания объекта.
Необходимо установить значения составляющих вектора a и b , после чего задать время интегрирования и значение частоты ω. Для того, чтобы на экране отображалось 2–3 периода х и у независимо от ω, перед нажатием кнопки «старт» следует установить значение k p из расчѐта ωk p = 2–3. Затем на вход этого объекта необходимо подать гармонический сигнал. Исследовать выходной гармонический сигнал следует после того, как прекратится собственная составляющая движения и сохранится только синусоида со своей фазой и амплитудой.
Для исключения ошибки в определении ϕ следует для каждого значения ω провести 2–3 измерения и выбрать совпадающие значения.
Порядок выполнения работы Задание
1.Изучить методику экспериментального получения частотных характеристик
2.Провести экспериментальные испытания, необходимые для построения частотных характеристик объекта управления.
3.Построить по экспериментально полученным точкам зависимости:
−амплитудно-частотную характеристику – M э(ω) ;
−фазово-частотную характеристику – ϕэ (ω) ;
−амплитудно-фазовую характеристику – Wэ (iω) .
4. Рассчитать аналитически амплитудно-фазовую характеристику –
W(iω)
5. Вычислить максимальную погрешность:
Лабораторная работа выполняется в следующем порядке:
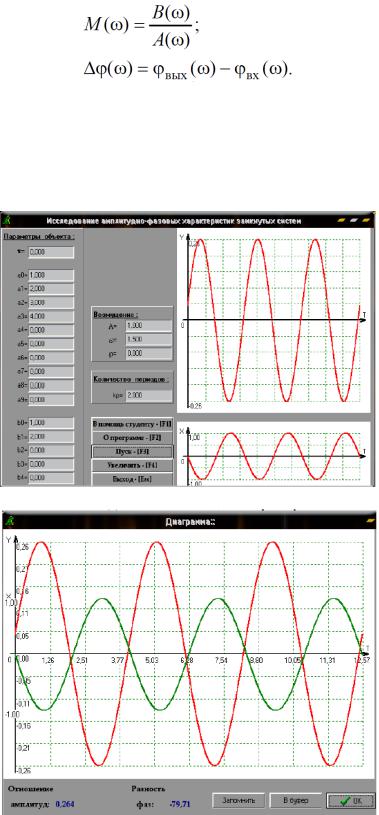
1.Осуществить запуск программы (лабораторной работы). На экране монитора отображается окно программы.
2.Изучить окно программы. Окно содержит четыре раздела: параметры объекта, параметры воздействия и управляющие параметры (рис. 5). Параметры воздействия: А – амплитуда; ω – циклическая частота;
ϕ– начальный сдвиг фаз в градусах; kp – количество выводимых на экран периодов возмущающего воздействия при ω = 1.
3.Изучить используемые клавиши с дополнительной информацией.
4.Ввести параметры объекта, заданные преподавателем.
5.Нажать на «Пуск» и после окончания собственной составляющей нажать кнопку «Стоп».
6.Нажать кнопку «Увеличить».
12
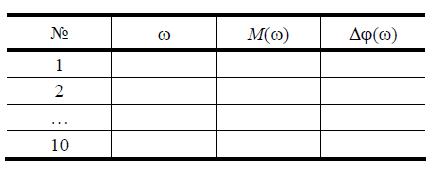
7.В открывшемся окне (рис. 6) находится график входного и выходного сигналов, а также значения отношения амплитуд – M(ω) и разность фаз – ϕ(ω) , вычисленных по формуле:
8.С помощью кнопки «В буфер» скопировать график в память, а с помощью кнопки «Запомнить» – записать полученные данные в память и занести результат в текстовый файл «Laba2.txt».
9. Постепенно увеличивая значения ω так, чтобы интервал в ϕ(ω) составлял 20 – 30°, снять результаты 10 – 15 экспериментов (значения интервала частоты будут неравномерными).
Рисунок 5 – Диалоговое окно задания параметров
Рисунок 6 – Установившиеся колебания
13
10. Занести результаты машинного эксперимента в табл. 1.
Таблица 1
Примечание: При каждом значении частоты необходимо провести несколько экспериментов, добиваясь получения истинного значения разности фаз (необходимо добиться совпадения 3–4 результатов по каждому значению частоты).
11.По полученным данным, взятым из файла «Laba2.txt», построить графики АЧХ, ФЧХ, АФХ на миллиметровой бумаге или бумаге в клетку.
12.По заданной передаточной функции моделируемого объекта управления вывести, а затем построить графики частотных характеристик: АЧХ, ФЧХ и АФХ ( можно с применением ПК).
13.Сравнить выведенные теоретически и полученные экспериментальным путѐм частотные характеристики. Определить погрешность экспериментальных данных.
Контрольные вопросы
1.Какое отображение называется конформным отображением?
2.Какая характеристика называется амплитудно-фазовой?
3.Как экспериментально определить амплитудно-частотную и фазово-частотную характеристики?
4.Какая связь имеется между передаточной функцией и амплитуднофазовой характеристикой?
5.Какая из частотных характеристик является основной и какова взаимосвязь между различными частотными характеристиками?
14
Лабораторная работа № 3 Статические и динамические характеристики элементов
автоматических систем
Цель работы: изучение основ функционирования автоматических систем, содержащих как линейные, так и нелинейные элементы, и математического описания автоматических систем с использование статических и динамических характеристик.
Общие сведения
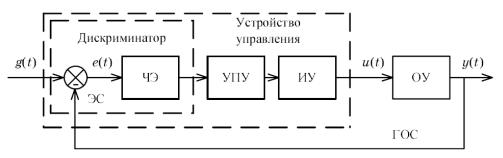
Большинство автоматических систем состоит из некоторых типовых по назначению устройств или функциональных элементов, совокупность которых приведена в общем виде на рис. 7.
Рисунок 7 – Структурная схема типовой автоматической системы
В число этих элементов входят: элемент сравнения ЭС, чувствительный элемент ЧЭ, усилительно преобразующее устройство УПУ, исполнительное устройство ИУ и объект управления ОУ. Элемент сравнения вместе с чувствительным элементом образует дискриминатор, а вся цепочка показанных последовательно соединенных звеньев (исключая объект управления) - устройство управления. Существенно наличие петли главной обратной связи ГОС, означающей, что показанная система является замкнутой.
Элементы автоматических систем характеризуются их назначением, принципом действия, устройством (конструкцией), электрической схемой и т. п. Каждый из этих элементов имеет вход и выход и описывается математическими выражениями, связывающими его выходную величину с входной. Данная математическая связь определяет тип звена, к которому относится отдельный рассматриваемый элемент. При этом различают два случая:
–зависимость выходной величины элемента от входной соответствует установившемуся режиму;
–зависимость выходной величины элемента от входной соответствует неустановившемуся (переходному) режиму.

15
В первом случае зависимость “выход-вход” есть статическая характеристика, во втором – динамическая характеристика.
Статическая характеристика элемента описывается алгебраическими уравнениями. По виду статической характеристики элементы автоматических систем разделяются на две группы – линейные звенья и нелинейные звенья.
Статическая характеристика нелинейного звена в общем случае имеет следующий вид: x2 = F(x1), где F(…) – некоторая нелинейная функция своего аргумента. Существенно, что статические характеристики звеньев замкнутых автоматических систем являются нечетными функциями, т. е. F(–x) = –F(x). Это означает, что с изменением знака входной величины изменяется знак его выходной величины, что принципиально необходимо для функционирования замкнутых автоматических систем. При наличии даже небольшой асимметрии в характеристике одного из элементов возникает ошибка автоматической системы в виде смешения управляемой величины y(t) относительно задающего воздействия g(t) (что можно наблюдать в ходе выполнения лабораторной работы).
Динамическая характеристика звена автоматической системы определяется дифференциальным уравнением, отражающим динамические процессы в нем. Следует сказать, что различные по физическим принципам действия элементы часто описываются одинаковыми дифференциальными уравнениями, поэтому их относят к одной группе динамических звеньев.
Иллюстрация работы замкнутой автоматической системы, в составе которой могут быть звенья с различными статическими характеристиками, проводится в лабораторной работе на примере системы, эквивалентная структурная схема которой показана на рис. 8. Эквивалентная схема разомкнутой части системы приведена цепочкой последовательно соединенных безынерционного звена со статической характеристикой F(e) и линейного динамического звена, определяющего динамические свойства исследуемой системы.
Рисунок 8 – Эквивалентная структурная схема
Линейная динамическая модель системы (рис. 8) основана на методе стандартных переходных характеристик и соответствует астатической системе первого порядка. При этом передаточная функция разомкнутой части системы имеет следующий вид:
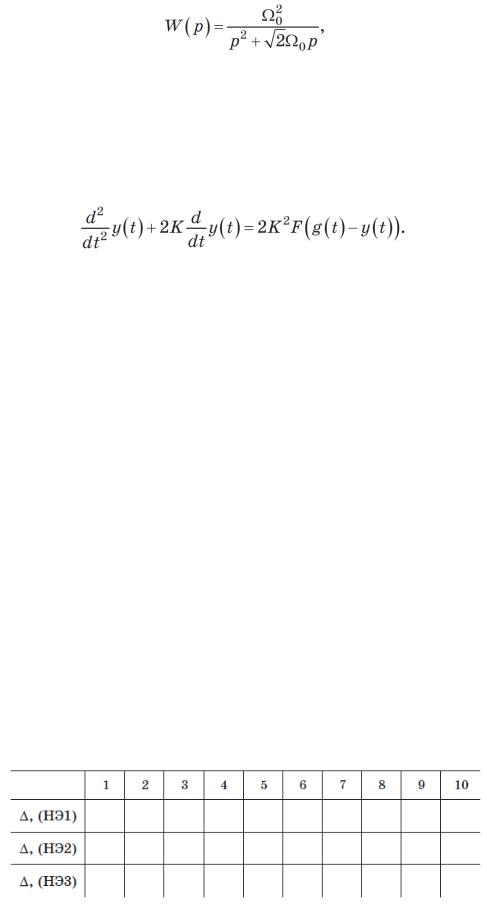
16
где p = c+j ω – оператор Лапласа;  – параметр, определяющий быстродействие системы.
– параметр, определяющий быстродействие системы.
Величина  связана с добротностью автоматической системы по
связана с добротностью автоматической системы по
скорости K соотношением  . Таким образом, дифференциальное уравнение рассматриваемой замкнутой автоматической системы можно записать в следующем виде:
. Таким образом, дифференциальное уравнение рассматриваемой замкнутой автоматической системы можно записать в следующем виде:
Численное решение данного дифференциального уравнения приводится в рабочих листах программы MathCad. Возможность изменения вида нелинейной функции F(…)непосредственно в рабочем листе (за счет подстановки соответствующих функций F1, F2,...) позволяет наглядно оценить специфику процесса автоматического управления при различных статических характеристиках.
Порядок выполнения работы
1.По согласованию с преподавателем выбрать виды нелинейности элемента автоматической системы (не менее трех) для исследования в лабораторной работе. Уточнить значения параметров модели динамической части автоматической системы и задающего воздействия.
2.Запустить программу моделирования и определить установившееся среднеквадратическое значение ошибки для линейной системы.
3.Ввести выбранную функцию F(e) в дифференциальное уравнение системы. Изменяя амплитуду гармонического задающего воздействия в пределах от 1 до 10, фиксировать на каждом шаге моделирования установившееся среднеквадратическое значение ошибки , заполняя результатами графы таблицы зависимости установившегося среднеквадратического значения ошибки от амплитуды задающего воздействия для исследуемых автоматических систем.
Таблица 2
17
Контрольные вопросы
1.Задача управления. Структурная схема типовой автоматической системы.
2.Понятия и определения статических и динамических характеристик элементов автоматической системы (Примеры).
3.Методы математического описания статических и динамических характеристик (Примеры).
4.Классификация автоматических систем по типу статических и динамических характеристик.
5.Методика моделирования автоматических систем в программе
MathCad.
Лабораторная работа № 4 Исследование динамических звеньев линейных автоматических
систем
Цель работы: изучение типовых динамических звеньев линейных автоматических систем, и способов их соединения с целью получения требуемой передаточной функции.
Общие сведения
В задачах анализа и синтеза различных автоматических систем наиболее часто используется разбиение на отдельные динамические звенья. Под динамическим звеном понимается устройство любого физического вида и конструкции, но описываемое определенными дифференциальными уравнениями.
Классификация звеньев автоматических систем производится именно по виду дифференциального уравнения. Одни и те же уравнения могут описывать весьма разнообразные устройства (механические, гидравлические, пневматические, электрические и т. д.). Для теории автоматического управления это будет один и тот же тип звена.
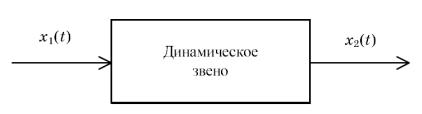
Обозначив входную величину звена (рис. 9) через x1, а выходную – через x2, проведем классификацию звеньев по виду их реакции на входное воздействие.
Рисунок 9 – Входная и выходная величины динамического звена

18
Взвеньях позиционного, или статического, типа линейной зависимостью x2 = kx1 связаны входная и выходная величины в установившемся режиме (рис.10, а). Коэффициент пропорциональности k между входной и выходной величинами представляет собой коэффициент передачи звена.
Взвеньях интегрирующего типа линейной зависимостью  связаны производная выходной величины и входная величина в установившемся режиме (рис.10, б). В этом случае для установившегося
связаны производная выходной величины и входная величина в установившемся режиме (рис.10, б). В этом случае для установившегося
режима будет справедливым равенство  , откуда и произошло название этого типа звеньев. Коэффициент пропорциональности k в этом случае также является коэффициентом передачи звена. Если входная и выходная величины звена имеют одинаковую размерность, то коэффициенту передачи соответствует размерность, с–1.
, откуда и произошло название этого типа звеньев. Коэффициент пропорциональности k в этом случае также является коэффициентом передачи звена. Если входная и выходная величины звена имеют одинаковую размерность, то коэффициенту передачи соответствует размерность, с–1.
Рисунок 10 – Связь входной и выходной величин
в установившемся режиме:
а– позиционное звено, б – интегрирующее звено,
в– дифференцирующее звено.
Взвеньях дифференцирующего типа линейной зависимостью
 связаны в установившемся режиме выходная величина и производная входной (рис. 10, в), откуда и произошло название этого типа звеньев. Коэффициент пропорциональности k является коэффициентом
связаны в установившемся режиме выходная величина и производная входной (рис. 10, в), откуда и произошло название этого типа звеньев. Коэффициент пропорциональности k является коэффициентом
19
передачи звена. Если входная и выходная величины звена имеют одинаковую размерность, то коэффициенту передачи соответствует размерность, с.
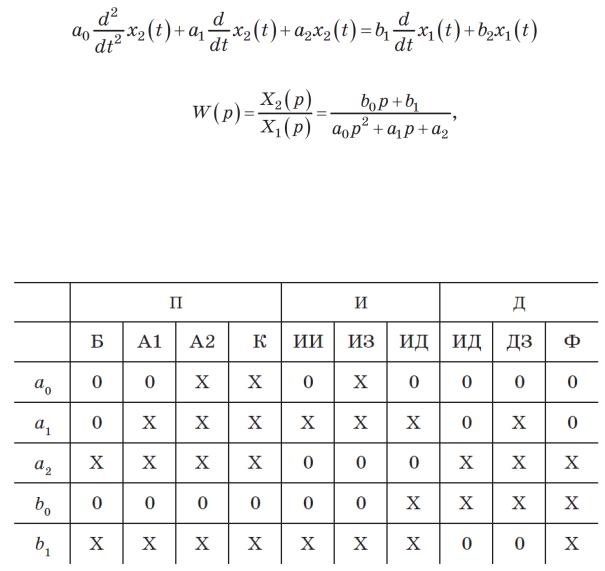
Классификация звеньев производится по виду дифференциального уравнения или, что то же, по виду передаточной функции звена. Под типовыми динамическими звеньями понимают те, которые описываются дифференциальными не выше второго порядка:
и соответственно имеющие передаточные функции вида:
где a0, a1, a2, b0, b1 – коэффициенты, определяющие тип звена в соответствии с таблицей коэффициентов передаточных функций типовых динамических звеньев, в которой показано, какие из коэффициентов a0, a1, a2, b0, b1 должны быть равны нулю и какие могут принимать различные значения X для определенного типового динамического звена.
Таблица 3
Принятые буквенные обозначения: П – позиционные звенья:
Б – безынерционное, А1 – апериодическое первого порядка,
А2 – апериодическое второго порядка, К – колебательное (предельным случаем которого является
консервативное звено при a1 = 0);
20
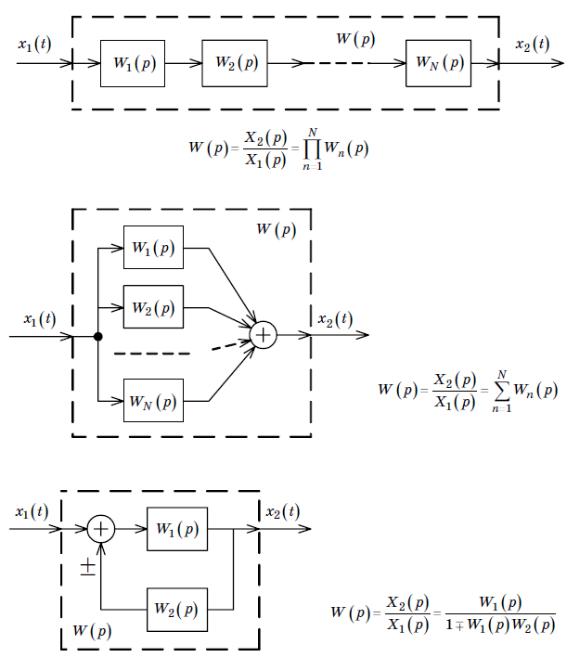
Рисунок 11 – Соединения динамических звеньев: a – последовательное, б – параллельное,
в– встерчно-параллельное (охват звена обратной связью).
И– интегрирующие звенья:
ИИ– идеально интегрирующее,
ИЗ – интегрирующее с замедлением, ИД – изодромное; Д – дифференцирующие звенья:
ИД – идеально дифференцирующее, ИД – дифференцирующее с замедлением, Ф – форсирующее.