

4062
.pdf31
Условия (4.12) и (4.13) будут удовлетворены только тогда, когда центр масс тела будет лежать на оси вращения, являющейся одной из главных осей инерции.
Тело считается уравновешенным статически, если выполняется только условие (4.12), и уравновешенным динамически, если выполняется только условие (4.13).
Динамическая неуравновешенность, или динамический дисбаланс Д
вращающегося тела измеряется величиной |
|
Д = ∑Gi ri ai [Hм2]. |
(4.14) |
Статическая неуравновешенность, или статический дисбаланс |
С , ха- |
рактеризующий оставшуюся неуравновешенность, измеряется статическим моментом
С = GrS [Hм], |
(4.15) |
где G- вес вращающегося тела, Н.
Неуравновешенное тело на практике чаще всего уравновешивают при помощи добавочных масс (противовесами). Вращающиеся тела, у которых общая длина значительно меньше их диаметра (шкивы, маховики, зубчатые колеса), имеют незначительные центробежные моменты инерции Jra, поэтому такие тела достаточно уравновесить только статически.
Пусть тело вращения массой m статически не уравновешено (рис.4.4). Центр масс S данного тела расположен на расстоянии от оси вращения rs. При уравновешивании противовес массой mпр помещают на линии N-N, проходящей через центр тяжести S перпендикулярно оси вращения, и закрепляют грузик с противоположной стороны.
Массу противовеса находим из уравнения |
|
|||
mпр |
= m |
rs |
. |
(4.16) |
|
||||
|
|
r |
|
|
|
|
пр |
|
|
Вместо установки противовеса можно удалить часть массы с противоположной стороны. Величина удаляемой массы должна быть равна массе противовеса.
Если конструктивно установить противовес на линии N-N не удается, можно заменить его на два противовеса массами m1 и m2, расположенных на расстояниях a1 и а2 от линии N-N.
Р1 |
N |
|
Р2 |
|
mпр |
||||
m1 |
m2 |
|||
|
|
rпр |
|
|
rs |
|
|
|
|
а1 |
N |
а2 |
|
|
|
Ри |
|
||
Рис. 4.4 Схема уравновешивания вращающегося тела |
||||
32
Массы m1 и m2 определяются из уравнений
mrs=m1rпр+m2 rпр;
m1rпрa1- m2 rпрa2=0,
откуда
m1 = m (rs a2 ) ; rпр a1 + a2
m2 = m rпр (a1 + a2 ) .
Сложив массы этих противовесов, получим
m1 + m2 = m rs = mпр ,
rпр
а из отношения найдем
m1 = a2 . m2 a1
(4.17)
(4.18)
(4.19)
(4.20)
(4.21)
(4.22)
Из приведенных формул следует, что один противовес массой mпр может быть заменен двумя противовесами с массами m1 и m2, расположенных на линии, параллельной оси вращения тела и подобранных так, чтобы их суммарная масса равнялась массе mпр, а их общий центр масс S совпадал с положением противовеса mпр.
Динамическое гашение колебаний
Как было отмечено выше, динамическое гашение осуществляется за счет ввода в конструкцию дополнительных устройств – виброгасителей.
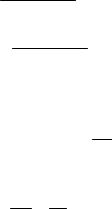
Пружинный одномассивный инерционный динамический гаситель
Объект, колебания которого необходимо снизить, представлен в виде массы М, прикрепленной к основанию пружиной с жесткостью с. Колебания объекта возбуждаются либо периодической силой, действующей на объект, либо вибрациями основания. Для уменьшения колебаний объекта к нему присоединяется динамический гаситель массой mг, имеющий пружину с жесткостью сг и вязкий демпфер с коэффициентом трения bг.
|
33 |
|
|
|
|
|
|
При настройке частоты |
|||
|
|
упругих колебаний га- |
|||
с |
|
сителя ωг = |
сг |
mг |
на |
|
|
|
|
|
|
|
|
частоту внешних воз- |
|||
М |
|
буждений ω колебания |
|||
|
|
объекта оказываются |
|||
|
|
пропорциональными |
|||
bг |
сг |
потерям в гасителе. |
|
||
|
При этом частота анти- |
||||
|
|
||||
|
|
резонанса совпадает с |
|||
mг |
|
частотой резонанса ис- |
|||
Рис. 4.5 Схема одномассивного инерционного |
ходной модели систе- |
||||
мы. |
|
|
|
||
динамического гасителя |
|
|
|
|
|
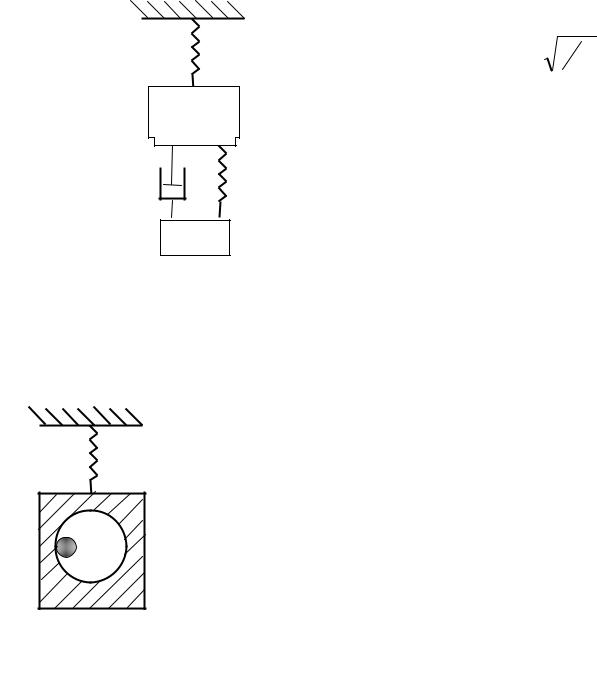
Катковые инерционные динамические гасители |
|
|
|
||
Рассмотрим демпфируемый объект с одной степенью свободы, возбуждае- |
|||||
|
мый гармонической силой G(t)=G0cos(ωt+φ) и |
||||
|
снабженный шариковым гасителем массой mги |
||||
с |
радиусом rг, расположенным в цилиндрической |
||||
|
полости радиусом r(рис.4.6). |
|
|
|
|
m |
Рассматриваемая система описывается следую- |
||||
|
щими дифференциальными уравнениями: |
|
|
||
mг |
(m+mг)х"+сх=G0cos(ωt+ψ)+(r- |
|
|
|
|
|
|
|
|
||
|
rг)mг(φ'2cosφ+φ"sinφ); |
|
|
|
|
Рис.4.6 Схема каткового |
mг(r-rг)2 φ"= mг (r-rг) х" sinφ, |
|
(5.23 ) |
||
инерционного |
где х- продольная координата объекта; φ- отно- |
||||
динамического гасителя |
|||||
|
сительная угловая координата положения гасите- |
||||
ля, отсчитываемая от вертикальной оси. Условие стабилизации объекта при |
|||||
х=х'=х"=0 будет |
|
|
|
|
|
|
φ=ωгt+φ0, |
|
|
(4.24) |
|
при этом условии гаситель совершает равномерное вращение. |
|
|
|||
Центробежная реакция, передаваемая равномерно вращающимся телом |
|||||
демпфируемому объекту, полностью уравновешивает возбуждение и обеспе- |
|||||
чивает стабилизацию объекта. |
|
|
|
|
|
34
Библиографический список
1.Артоболевский И.И. Теория механизмов и машин: Учеб. для втузов.- 4-е изд., перераб. и доп. – М.:Наука. 1988.-640 с.
2.Гончаров П.Э. Теория механизмов и машин: Учеб. пособие / П.Э. Гончаров, П.И. Попиков, С.А. Колосов.-Воронеж, 2000.-139 с.
3.Курсовое проектирование по теории механизмов и машин / А.С. Кореняко, Л.И. Кременштейн, С.Д. Петровский, Г.М. Овсиенко, В.Е. Баханов, П.М. Емец.-Киев: Вища школа,1970.-332 с.
4.Теория механизмов и механика машин: Учеб. для втузов/ К.В. Фролов, С.А. Попов, А.К. Мусатов, Д.М. Лукичев, В.А. Никоноров, Г.А. Тимофеев, А.В. Пуш.-3-е изд., стер.- М.: Высш.шк., 2001.-496 с.