

4062
.pdf11
Лишние степени свободы – степени свободы, не оказывающие влияния на кинематику механизма.
На рис. 1.8 а представлен кулачковый механизм, число степеней свободы которого равняется двум. Лишнюю степень свободы дает звено 2 - ролик, которое не влияет на кинематику движения механизма. Удалив ролик из механизма, получим W=1 (рис. 1.8 б).
D |
|
C |
|
|
|
3 |
|
2 |
2 С |
|
В |
В |
|
1 |
|
|
|
1 |
|
|
А |
а |
А |
|
б |
Рис. 1.8 Кинематическая схема кулачкового механизма Для упрощения анализа механизмов часто избавляются от высших ки-
нематических пар, заменяя их низшими. Одну высшую кинематическую пару можно заменить двумя низшими, и звеном, длина которого равна сумме радиусов кривизны соприкасающихся поверхностей, образующих высшую кинематическую пару. Высшая кинематическая пара В образована зацеплением двух зубчатых колес 1 и 2 (рис. 1.9 а), заменим ее двумя низшими кинематическими парами В, С и звеном 2 длина r которого равна сумме радиусов зубчатых колес r1 и r2 (рис 1.9 б). Кулачковый механизм содержит высшую кинематическую пару В (рис. 1.9 в), ее заменяем низшими кинематическими парами В,С и звеном 2 длинной r, причем r=r1(рис.1.9 г)
|
В |
2 |
В |
|
|
|
1 |
|
|
1 |
|
|
|
|
|
|
А |
|
|
|
|
|
D |
|
А |
r1 |
С |
r |
|
|
r2 |
|
||
|
|
|
2 |
3 |
|
а |
|
б |
С |
|
|
|
||
|
С |
|
D |
|
|
|
2 |
|
3 |
|
В |
|
С |
|
|
|
1 |
|
r |
|
|
|
2 |
|
|
А |
r1 в |
г А |
|
|
|
|||
|
|
|
|
1 |
|
|
|
|
В |
Рис. 1.9 К замене высших кинематических пар низшими
12
Структурный анализ механизмов
Последовательность выполнения структурного анализа
1 Составляется кинематическая и структурная схема механизма. Кинематическая схема показывает принцип работы механизма, т.е. относительное перемещение звеньев, и строится в определенном масштабе с обозначением всех звеньев и кинематических пар. Структурная схема составляется для структурного анализа механизмов и отличается от кинематической схемы следующим:
а) высшие кинематические пары заменяются условным звеном, входящим в две низшие кинематические пары; б) поступательные пары заменяются вращательными, поскольку они
структурно эквивалентны (относятся к пятому классу); в) избыточные связи и лишние степени свободы убираются;
г) звенья, входящие в три кинематические пары, заменяются треугольником; в четыре кинематические пары четырехугольником и т.д.
2 Определяется число степеней подвижности.
3 Механизм разделяется на группы Ассура и механизмы первого класса. Отделение группы Ассура начинается с последнего звена (ведомого). После отделения группы Ассура число степеней свободы оставшейся части механизма измениться не должно.
Сначала пытаются отделить простейшую группу Ассура (2 звена 3 кинематические пары). Если число степеней механизма изменяется, то отделяют более сложную группу Ассура.
4 Определяется класс и порядок групп Ассура и класс всего механизма. 5 Записывается формула строения механизма.
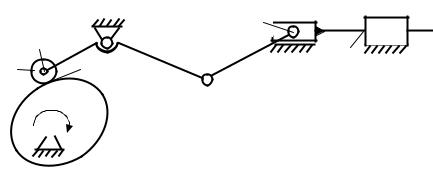
ПРИМЕР: Необходимо произвести структурный анализ механизма. Из кинематической схемы (рис. 1.10) видно, что механизм состоит из пяти подвижных звеньев(1; 2; 3; 4; 5) шести низших (A; C; D; E; F; H) и одной высшей кинематической пары. При составлении структурной схемы (рис. 1.11 ) механизма необходимо заменить высшую кинематическую пару В на низшие, отбросить звено 2(ролик), т.к. оно дает лиш-
нюю степень свободы, звено 3 заменить треугольником, т.к. оно входит в три кинематические пары, поступательную пару Н заменить на вращательную.
|
|
|
|
|
|
F |
5 |
|
|
D |
|
|
|
|
|
|
С |
3 |
|
4 |
|
H |
|
2 |
В |
|
|
E |
|
|
|
|
|
|
|
|
1
А
Рис. 1.10 Кинематическая схема механизма
13
|
D |
F 5 |
H |
|
3 |
E 4 |
|||
|
|
|||
С |
|
|
2
А 
1  В
В
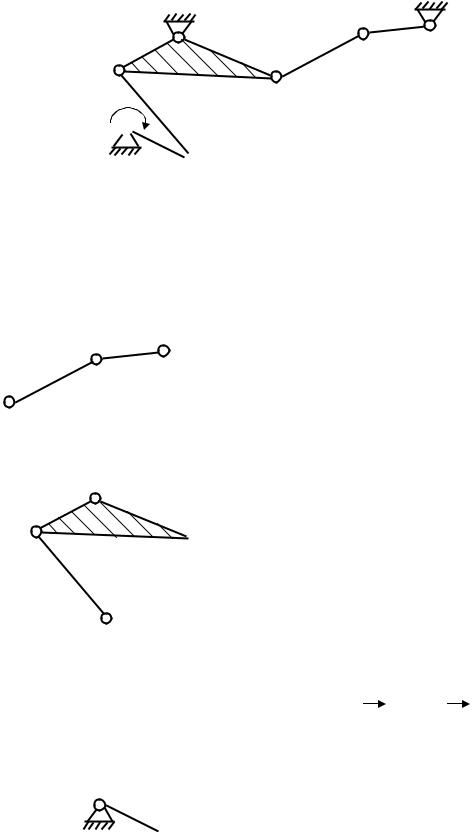
Рис. 1.11 Структурная схема механизма
По формуле Чебышева определяем число степеней свободы механизма
W = 3n − 2p2 − p1 = 3×5-2×7-0=1.
|
F 5 |
H |
Отделяем группу Ассура второ- |
|||||||||||||||
|
го класса, второго порядка |
|||||||||||||||||
|
4 |
|
|
|||||||||||||||
E |
|
|
(рис. 1.12), при этом число сте- |
|||||||||||||||
|
|
|
||||||||||||||||
|
|
|
пеней подвижности оставшейся |
|||||||||||||||
|
|
|
|
|||||||||||||||
Рис. 1.12 Группа Ассура 4-5 |
части механизма остается неиз- |
|||||||||||||||||
менным. Отделяем следующую |
||||||||||||||||||
|
|
|
|
группу Ассура, содержащую |
||||||||||||||
|
D |
3 |
|
звенья 2; 3, она также имеет вто- |
||||||||||||||
|
С |
|
рой класс и второй порядок |
|||||||||||||||
|
|
|
||||||||||||||||
|
|
|
(рис. 1.13). |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
После отделения групп Ассура |
||||||||||||||
|
2 |
|
|
остается механизм первого клас- |
||||||||||||||
|
|
|
са, состоящий из стойки-0 и ве- |
|||||||||||||||
|
|
В |
|
|||||||||||||||
|
|
|
дущего звена-1(рис. 1.14). Запи- |
|||||||||||||||
|
|
|
|
сываем формулу строения меха- |
||||||||||||||
Рис.1.13 Группа Ассура 2-3 |
низма |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
(0;1) |
|
|
|
|
2(2;3) |
|
|
|
|
|
2(4;5). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Формула читается следующим образом: механизм первого класса, содержа-
|
щий звенья один и два, присоеди- |
|
А |
няет к себе группу Ассура второ- |
|
1 |
го класса второго порядка, со- |
|
держащую звенья два, три и при- |
||
0 |
||
соединяет группу Ассура второго |
||
|
||
Рис.1.14 Механизм первого класса |
класса второго порядка, содер- |
|
|
жащую звенья четыре, пять. |
14
РАЗДЕЛ 2 КИНЕМАТИЧЕСКИЙ АНАЛИЗ И СИНТЕЗ МЕХАНИЗМОВ
Кинематический анализ механизма – изучение движения звеньев механизма без учета масс звеньев и сил, действующих на механизм.
Задача кинематического анализа состоит в определении перемещений звеньев, траекторий точек звеньев, а также в нахождении скоростей и ускорений точек в функции времени или в функции перемещения начальных звеньев.
Кинематический анализ может производиться следующими способами:
1Графическим (с помощью построения диаграмм перемещения, скоростей, ускорений).
2Графоаналитическим (построение планов скоростей, ускорений со
вспомогательными расчетами по формулам).
3Аналитическим (с помощью формул).
Определить положения звеньев механизма, их перемещения и траектории точек в зависимости от положения ведущего звена можно графическим способом (методом построения планов механизма).
Построение планов положений механизма
Рассмотрим графический метод построения планов положений механизма на примере кривошипно-ползунного механизма. Заданы длины звеньев
ℓОА,; ℓАВ, положение направляющей оси Х-Х (рис. 2.1). Примем, что ведущее звено ОА вращается с постоянной угловой скоростью. Строим кинематическую схему механизма в определенном масштабе:
l |
= |
lОА |
= |
l АВ |
, м/мм, |
(2.1) |
|
|
|||||
|
|
ОА АВ |
|
|
||
где ℓОА; ℓАВ – действительные длины звеньев; ОА, АВ – длины звеньев, отложенных на кинематической схеме в масштабе.
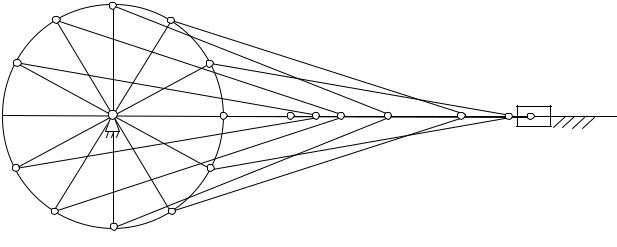
Из точки О проводим окружность радиуса ОА и отмечаем на ней положения точки А ведущего звена – АО, А1…А11. Положения звена АВ определяют методом засечек. Точка В движется по прямой Х-Х. Ее положения ВО, В1…В11 получим на пересечении оси Х-Х с дугой окружности В-В радиуса АВ, описанной из точек АО, А1…А11 соответственно. Соединив точки АО, А1, А2…А11 с центром О, а также с точками ВО, В1, В2… В11, получим планы механизма в 12 положениях (рис. 2.1).
А8
А7
А6 
А5
А4 |
15
А9 А10
|
А11 |
|
|
|
О |
B6 B7 B8 |
B9 |
B10 |
B11 B0 |
А0 |
|
|
|
|
|
В5 В4 |
В3 |
В2 |
В1 |
А1
А3 А2
Рис. 2.1 Планы положений механизма
Графический способ определения кинематических характеристик механизма методом кинематических диаграмм
Данный способ заключается в определении графиков (кинематических диаграмм) изменения перемещения, скорости, ускорения в функции времени t. Пусть необходимо построить кинематические диаграммы S = f (t);
V= f (t); а = f (t) точки В кривошипно-ползунного механизма. Для этого:
1 Строим отрезок ℓ=ОО мм, изображающий время одного полного оборота кривошипа ОА в масштабе t.
|
|
= |
t |
|
, с/мм, |
(2.2) |
|
t |
l |
||||||
|
|
|
|
||||
|
|
|
|
|
|||
где t – время одного полного оборота кривошипа |
|
||||||
t = 60 |
, с, |
(2.3) |
|||||
|
|
n |
|||||
n – частота вращения кривошипа [об/мин].
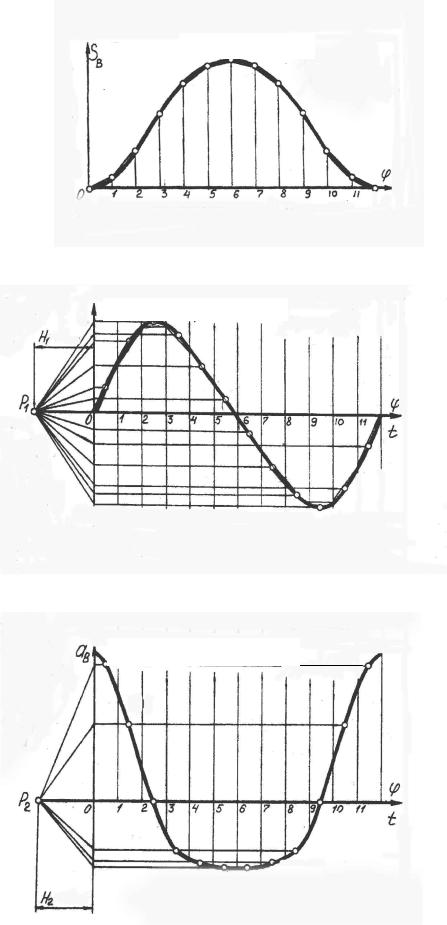
Отрезок ℓ=ОО делим на 12 равных частей. На плане положений механизма определяем расстояния В0В1; В0В2; В0В3 и т.д., откладываем их в одноименных точках 1; 2; 3 и т.д. Масштабный коэффициент S для оси перемещения диаграммы S = f (t) принимаем равный двум масштабным коэффициентам плана положений механизма S = 2 l .
2Соединив последовательно плавной кривой полученные точки 0; 1/; 2/; 3/ и т.д., получим диаграмму перемещения точки В (рис. 2.2). Диаграмма скорости точки В (V = f (t)) получается графическим дифференцированием диаграммы S = f (t). Графическое дифференцирование выполняется методом хорд в следующей последовательности:
16
|
|
6' |
|
5' |
7' |
4' |
|
8' |
3' |
|
9' |
2' |
|
10' |
1' |
|
11' |
О
Рис. 2.2 Диаграмма перемещения точки В
Рис. 2.3 Диаграмма скорости точки В
Рис 2.4 Диаграмма ускорения точки В

17
а) под диаграммой S = f (t) строим параллельную систему координат V = f (t) и влево от точки О1 откладываем отрезок О1Р=Н1 [мм]. Из точки Р проводим лучи параллельно хордам 01/; 1/2/; 2/3/ до пересечения с осью 0S. От полученных точек проводим горизонтали до середины диапазонов, в которых проведены хорды. Соединив точки в серединах диапазонов плавной кривой, получим диаграмму V = f (t) (рис. 2.3).
Имея диаграмму скорости, аналогично строим диаграмму ускорения, а=f(t) (рис.2.4).
Масштаб µt для всех графиков остается неизменным. Масштабы по осям ординат определяются по следующим формулам:
для диаграммы скоростей
v |
= |
|
|
|
s |
|
, |
м / с |
; |
|
(2.4) |
|||
|
|
|
|
|
|
|
|
|||||||
t Н1 |
мм |
|||||||||||||
|
|
|
|
|
|
|
|
|||||||
для диаграммы ускорения |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a |
= |
|
|
|
v |
|
|
, |
|
м / с |
. |
(2.5) |
||
|
|
|
|
|
|
|
||||||||
|
|
|
Н |
|
|
|||||||||
|
|
|
t |
2 |
|
|
|
мм |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
Из формул видно, что величины масштабов зависят от полосных расстояний Н1 и Н2.
Графоаналитический метод определения кинематических характеристик
Кинематическое исследование этим методом осуществляется в следующей последовательности:
1)производится структурный анализ заданного механизма;
2)вычерчивается механизм в положениях, для которых требуется построить планы скоростей и ускорений;
3)строятся планы скоростей и ускорений сначала для ведущих звень-
ев, а затем для всех групп Ассура; Произведем кинематический анализ кривошипно-ползунного механиз-
ма в заданном положении (рис. 2.5). Известно, что кривошип ОА вращается с постоянной угловой скоростью ω (рад/с), а также даны основные размеры
lОА; lАВ; l АS2 = 13 l АВ . Точка S2 является центром масс шатуна.
Произведя структурный анализ, установим, что механизм состоит из механизма первого класса, содержащего звенья 0; 1 и группы Асура II класса 2-го порядка, включающей звенья 2; 3. Число степеней подвижности механизма – единица (W=1).

|
|
|
18 |
|
|
А |
S2 |
|
ω |
|
|
|
|
2 |
|
О 1 |
|
|
|
|
|
В |
|
х |
|
|
х |
|
|
|
3 |
Рис. 2.5 Кинематическая схема кривошипно-ползунного механизма
Построение плана скоростей
Значение скорости точки А определяется по формуле
VA = ω l OA , м / c , |
(2.6) |
для построения плана скоростей необходимо выбрать масштабный коэффициент
µ |
|
= |
vA |
, |
м/с |
, |
(2.7) |
v |
|
мм |
|||||
|
|
P |
|
|
|||
|
|
|
a |
|
|
|
|
где Ра – длина отрезка, изображающего вектор скорости ϑА.
Для определения скорости точки В составим векторное уравнение. Точка В совершает сложное движение: она повторяет движение точки А и одновременно вокруг нее вращается.
ϑB = ϑA +ϑBA , |
(2.8) |
где ϑB - вектор скорости точки В; ϑA - вектор скорости точки А;
ϑBA - вектор скорости точки В в ее относительном движении вокруг
точки А.
Это векторное уравнение решается графически (рис. 2.6).
Р |
r |
b |
|
ϑ B |
|
||
|
r |
|
|
|
ϑ S 2 |
ϑ |
BA |
|
|
|
S2
ϑ A
Отрезок РА, изображающий скорость ϑA , откладывается из полюса Р плана скоростей в направлении вращения кривошипа перпендикулярно ОА, из точки а проводится прямая, перпендикулярная шатуну АВ, а из точки Р проводится прямая, параллельная оси х-х. Обе прямые пересекаются в т. b. Отрезок Рb обо-
aзначает ϑB – вектор скорости точки В, а отре-
Рис. 2.6 План скоростей |
зок ва - ϑBA – вектор скорости точки В в ее от- |
|
носительном движении вокруг точки А. |
19
Скорость точки S2 центра масс шатуна АВ находится из подобия
|
|
аS |
2 |
= |
|
lAS |
2 |
|
, отсюда |
|
|
ав |
|
lAB |
|||||
|
|
|
|
|
|||||
|
|
|
|
|
l AS |
|
|
ав , |
|
|
аS |
|
= |
2 |
|
||||
|
2 |
|
l AB |
||||||
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|||
где l AS |
, l AB - реальные размеры механизма. |
||||||||
2 |
|
|
|
|
|
|
|
|
|
Отрезок aS2 плана скоростей определяет положения точки S2 вектора ϑS2 на
отрезке ав. Соединив точку S2 с полюсом плана Р, получим отрезок РS2, изображающий в масштабе v скорость ϑS2 точки S.
Для определения величин скоростей необходимо длины отрезков плана скоростей умножить на масштабный коэффициент µv
VB = Pв v ; VBA = вa v ; |
VS2 = PS2 v |
Построение плана ускорений
Величина ускорения точки А определяется по формуле
2
аА = аnAO = VA , м/с2. (2.9)
l OA
Задаваясь длиной отрезка Па [мм], изображающего на плане ускорений век-
r
тор аА определяем коэффициент плана ускорений µа
а = |
а |
А |
, |
м/с |
2 |
. |
(2.10) |
|
|
|
|||||
Па |
мм |
|
|||||
|
|
|
|
|
|||
Ускорение точки В найдется из векторного уравнения
r |
r |
r |
τBA , |
|
а |
В = аА + аBAn |
+ а |
(2.11) |
r
где аВ - вектор ускорения точки В;
r
аА - вектор ускорения точки А;
аBAn ,аrBAr - векторы нормального и тангенциального ускорения точки В в ее относительном движении вокруг точки А.
Нормальное ускорение аBAn определяется:
аBAn = |
VBA2 |
, м/с2. |
(2.12) |
|
l AB |
||||
|
|
|
Величина отрезка an2, изображающего вектор аBAn ,
аn
аn2 = BA , мм. (2.13)
µа
Векторное уравнение 2.11 решается графически (рис. 2.7).
Из полюса плана ускорений П откладываем вектор ускорения точки А (отрезок Па) параллельно звену ОА, направляя его от точки А к центру вращения О. Из точки а отрезка Па откладываем отрезок an2, параллельный шатуну АВ,

|
|
|
|
|
20 |
|
|
в направлении от В к А. Из точки n2 |
проводится |
прямая, перпендикуляр- |
|||||
b |
r |
|
ная отрезку an2, а из полюса плана |
||||
а В |
П |
ускорений |
П |
проводится прямая, |
|||
r |
|
||||||
|
|
параллельная оси х-х. |
|||||
аτBA |
r |
||||||
|
|
|
Прямые пересекутся в точке в. От- |
||||
n2 |
а |
А |
резок Пв обозначает аВ - вектор ус- |
||||
|
|
n |
|
|
|||
|
а |
BA |
а |
|
корения точки В, а отрезок n2в, пер- |
||
|
|
|
|
|
|||
Рис. 2.7 План ускорений |
пендикулярный |
отрезку аn2, изо- |
|||||
r |
τBA - вектор тангенциаль- |
||||||
|
|
|
|
|
бражает а |
||
ного ускорения точки В в ее относительном движении вокруг точки А. Соединив точки а и в, получим вектор аAВ .
Положение точки S2, центра масс шатуна АВ на отрезке ав находится из подобия
аS |
2 |
|
l AS |
|
|
|
l AS |
|
|
= |
2 |
, отсюда аS |
|
= |
2 |
ав . |
|
|
|
|
2 |
|
||||
ав |
l AB |
|
|
l AB |
||||
|
|
|
||||||
Соединив точку S2 с полюсом плана П, получим отрезок ПS2, изображающий вектор ускорения аS2.
Для определения величин ускорений точек механизма необходимо длины отрезков плана ускорений умножить на масштабный коэффициент а:
аВ = Пв а ; |
аS |
= ПS |
2 |
а ; и т.д. |
|
|
2 |
|
|
РАЗДЕЛ 3 КИНЕТОСТАТИЧЕСКИЙ АНАЛИЗ МЕХАНИЗМОВ
Задача силового анализа механизма – определение сил, действующих на механизм.
Практически любой машинный агрегат можно представить в виде схе-
мы:
Механизмы |
|
Передаточные |
|
Технологич. машины |
двигателя |
|
механизмы |
|
механизма |
|
|
|
|
|
На данной части машинного агрегата действуют:
1)движущие силы, которые стремятся ускорить движение механизма, совершающие полезную работу (в двигателе внутреннего сгорания (ДВС) сила давления газа на такте расширения);
2)силы полезного сопротивления – те, которые необходимо преодолеть для выполнения требуемого технологического процесса (в станках – сила резания, в автомобилях – сила сопротивления качения);