

3665
.pdf10 |
|
Статика |
Таблица 1 |
Основные понятия статики |
|
. Сила – это мера механического взаимодействия тел, характеризующая интенсивность и направление этого взаимодействия. Линия действия силы – это линия, на которой лежит вектор силы.
Проекция силы F на ось Ох – это произведение модуля силы F на косинус угла α между силой и осью: Fx = F cos α.
Примеры:
Fх= Fcos30o |
Fy = - Fcos60o |
Rx= Rcos40o |
Ry =Rcos50o |
Qx = 0 |
Qy = - Q |
Sx= S |
Sy = 0 |
2. Пара сил – это система двух равных по модулю, параллельных и противоположно направленных сил.
Плечом пары сил называется кратчайшее расстояние h между линиями действия сил пары.
1. Алгебраический момент силы F относительно центра О определяется как произведение модуля силы F на плечо h, взятое с опреде-
ленным знаком: mo (F) = ±F h .
Плечом силы F относительно О называется длина перпендикуляра, опущенного из точки О на линию действия силы.
Знак + выбирается, когда сила стремится повернуть тело вокруг моментной точки против часовой стрелки.
Замечание. Момент равен 0 лишь в том случае, когда линия действия силы проходит через моментную точку: mA (F) = 0 .
2. Алгебраический момент пары сил определяется как произведение модуля одной из сил пары на плечо пары: m(F, F' ) =±F h
 обозначение:
обозначение:  или
или

11 |
|
Статика |
Продолжение табл. 1 |
Связи и реакции связей |
|
Связями называются тела, которые ограничивают свободу движения данного тела в том или ином направлении в пространстве.
Реакция связи – это сила, с которой связь действует на тело, препятствуя его свободному перемещению в пространстве. Реакция связи направлена противоположно тому направлению, по котором эта связь препятствует телу перемещаться.
Основные типы связей
1. Простое соприкоснове- |
2. Гибкая связь |
3. Цилиндрический шар- |
4. Невесомый стер- |
5. Жесткая заделка |
||||
ние двух гладких тел |
||||||||
|
нир |
|
жень |
|||||
(гладкая опора) |
|
|
|
|
||||
|
|
|
|
|
|
|||
Реакция |
направлена по |
Осуществляется с по- |
а) неподвижный |
|
Осуществляется с помо- |
На заделанный конец бал- |
||
общей нормали к соприка- |
мощью нитей, канатов, |
Реакция |
проходит |
через |
щью стержней с шар- |
ки действует система рас- |
||
сающимся |
поверхностям |
цепей и т.п. |
центр шарнира и |
может |
нирным закреплением на |
пределенных сил, которую |
||
(нормальная реакция). |
Реакция направлена |
иметь любое направление в |
концах. |
можно заменить одной не- |
||||
|
|
вдоль связи от тела. |
плоскости, |
перпендикуляр- |
|
известной силой (ее со- |
||
|
|
|
ной его оси (ее составляю- |
Реакция направлена |
ставляющие RX и RY) и |
|||
|
|
|
щие RX и RY). |
|
вдоль линии, проходя- |
одной парой сил с неиз- |
||
|
|
|
|
|
|
щей через шарниры на |
вестным моментом Мз. |
|
|
|
|
|
|
|
концах. |
|
|
|
|
|
|
|
|
В отличие от гибкой свя- |
|
|
|
|
|
|
|
|
зи, стержень может быть |
|
|
|
|
|
|
|
|
не только растянут, но и |
|
|
|
|
|
|
|
|
сжат. |
|
|
|
|
|
б) подвижный |
|
|
|
||
|
|
|
Реакция перпендикулярна |
|
|
|||
|
|
|
поверхности перемещения |
|
|
|||
|
|
|
корпуса шарнира. |
|
|
|
||
|
|
|
|
|
|
|
|
|

|
|
12 |
|
|
|
|
|
|
Статика |
|
|
Окончание табл. 1 |
|
|
Условия и уравнения равновесия плоской системы сил |
|
|
|||
Плоская система сходящихся сил |
Произвольная плоская система сил |
|
||||
Необходимым и достаточным ус- |
Необходимым и достаточным условием равновесия произвольной плоской сис- |
|||||
ловием равновесия системы схо- |
темы сил является равенство нулю главного вектора и главного алгебраического |
|||||
дящихся сил является равенство |
момента этой системы сил |
|
|
|||
нулю главного вектора этой сис- |
|
Ф = ∑Fk =0 , |
|
|
||
темы сил |
|
MO = ∑mO (Fk ) = 0 |
|
|
||
|
|
|
|
|
||
|
Ф = ∑Fk = 0 |
Три формы уравнений равновесия |
|
|||
|
|
|
|
|
||
|
Уравнения равновесия |
Первая (основная) |
Вторая |
|
Третья |
|
|
|
|
|
|
||
∑Fkx |
= 0 , |
∑Fkx = 0 , |
∑mА(F k ) = 0 , |
∑mА(F k ) = 0 , |
||
∑mВ |
(F k ) = 0 , |
|||||
∑Fky |
= 0 , |
|||||
∑Fky = 0 , |
∑mВ (F k ) = 0 , |
|||||
∑mС |
(F k ) = 0 , где А, В и |
|||||
т.е. сумма проекций всех сил системы на |
∑mO (F k ) = 0 , |
∑Fkx = 0 , где Ох not АВ |
||||
С – |
не лежат на одной |
|||||
координатные оси х, y должна равняться |
|
|
прямой, |
|||
нулю. |
|
т.е. сумма проекций всех |
т.е. сумма алгебраических мо- |
|
|
|
|
|
сил на координатные оси x, |
ментов всех сил относительно |
т.е. сумма алгебраических |
||
|
|
y и сумма алгебраических |
двух произвольных точек А и В и |
|||
|
|
моментов всех сил относи- |
||||
|
|
моментов этих сил относи- |
сумма проекций всех сил на ось |
|||
|
|
тельно трех произвольных |
||||
|
|
тельно произвольной точки |
x, не перпендикулярную прямой, |
|||
|
|
точек, не лежащих на одной |
||||
|
|
О должны равняться нулю. |
проходящей через эти точки, |
|||
|
|
прямой, должна равняться |
||||
|
|
|
должны равняться нулю. |
|||
|
|
|
нулю. |
|
||
|
|
|
|
|
||
13
Порядок решения задач статики
Приступая к решению любой задачи, следует, прежде всего установить равновесие какого тела (или тел) надо рассмотреть, чтобы найти искомые величины. Решение задачи сводится к следующим операциям.
1.Выбор тела (или тел), равновесие которого должно быть рассмотрено. Для решения задачи надо рассмотреть равновесие тела, к которому приложены заданные и искомые силы. Если заданные силы действуют на одно тело, а искомые на другое или когда и те и другие силы действуют одновременно на несколько тел, может оказаться необходимым рассмотреть равновесие системы этих тел или последовательно равновесие каждого тела в отдельности.
2.Изображение действующих сил. Установив, равновесие какого тела или тел рассматривается (и только после этого), следует изобразить на чертеже все действующие на это тело (или тела) внешние силы, включая как заданные, так и искомые силы, в том числе реакции всех связей
3.Выбор координатных осей и центра моментов. Центр моментов рекоменду-
ется выбирать в точке пересечения двух неизвестных сил, тогда в уравнение моментов войдет только одна неизвестная величина (центр моментов удобно выбирать на неподвижной шарнирной опоре, если таковая имеется среди связей).
4.Составление условий равновесия. Условия равновесия составляют для сил, действующих на тело (или тела), равновесие которых рассматривается.
5.Определение искомых величин, проверка правильности решения. Решая полу-
ченные уравнения равновесия, определяют искомые величины, при этом большое значение имеет аккуратный чертеж и последовательное проведение всех выкладок. Для определения правильности полученных значений составляют уравнение проверки.
Метод разбиения
Статический расчет инженерных сооружений обычно сводится к рассмотрению равновесия конструкции, состоящей из тел, соединенных связями (механической системы). Связи, соединяющие тела одной механической системы, называются внутренними. Связи, скрепляющие тела данной механической системы с телами, в нее не входящими, называются внешними.

|
|
14 |
|
|
|
|
|
|
|
В |
a |
|
А RA |
С |
|
|
|
|
|
D |
|
||
|
|
|
|
|
|
YA |
|
|
|
|
|
mA |
|
|
|
|
б |
А |
X A |
С |
S |
|
|
|
|
|
|||
YA |
|
YС |
X С |
|
|
mA |
|
|
|
|
|
|
|
|
|
|
|
А |
X A |
X С |
|
|
S |
|
YС |
|
|||
|
|
|
|
|
вг
Рис. 1 Иллюстрация к методу разбиения
Если после отбрасывания внешних связей задача о равновесии всей системы как целого остается статически определенной (для плоской системы сил содержит не более трех неизвестных), то задача решается как для одного абсолютно твердого тела (принцип затвердевания).
Чаще задача для всей конструкции как целого бывает статически неопределенной. Так, схема сил для балки, изображенной на рис. 1,б, содержит 4 неизвестных, а независимых уравнений статики можно составить лишь 3. Тогда необходимо рассмотреть еще равновесие одной из частей (рис. 1 в, г), для которой можно составить еще 3 уравнения, содержащие два новых неизвестных Хс, Ус – реакции внутренней связи. Такой метод решения называется методом разбиения.
Центр тяжести. Способы определения координат центров тяжести тел
1. Метод симметрии: если однородное тело имеет плоскость, ось или центр симметрии, то его центр тяжести лежит соответственно в этой плоскости, на этой оси или в этом центре.
Из свойств симметрии следует, что центр тяжести однородного круглого кольца, круглой или прямоугольной пластины, прямоугольного параллелепипеда, шара лежит в геометрическом центре (центре симметрии).
Точно так же центры тяжести швеллера (рис. а) и равнополочного уголка (рис. б) лежат на их оси симметрии (х–х), а центр тяжести двутавра (рис. в) ле-
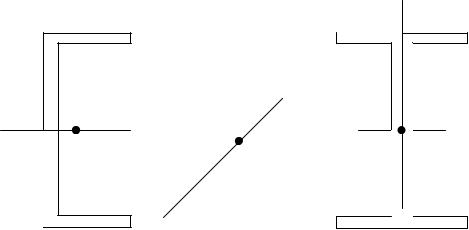
15
жат на пересечении осей симметрии (х–х и у–у)
y
|
|
|
|
x |
|
|
|
x |
|
C x |
|
|
x |
C x |
|
|
|
|
|
C |
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
x
y
а |
б |
в |
2. Метод разбиения: если тело можно разбить на конечное число таких частей, для каждой из которых положение центра тяжести известно, то координаты центра тяжести можно вычислить по формулам для центра тяжести плоской фигуры:
x |
С |
= |
∑Si xi |
, y |
C |
= |
∑Si yi |
, |
|
∑Si |
∑Si |
||||||||
|
|
|
|
|
где Si – площадь i-ой части, (xi, yi) – координата ее центра тяжести, при этом число слагаемых в каждой из сумм будет равно числу частей, на которые разбито тело.
3. Метод дополнения. Этот способ является частным случаем способа разбиения. Он применяется к телам, имеющим вырезы, если центры тяжести тела без выреза и вырезанной части известны. В этом случае используются те же формулы, что и в методе разбиения, но площади вырезанных частей считаются отрицательными.
Статический момент плоской фигуры относительно оси
Сумма произведений площадей S элементарных площадок на алгебраические значения их расстояний до некоторой оси называется статическим моментом фигуры относительно этой оси: Six и Siy статические моменты плоской фигуры относительно осей х и у:
Six =S yС ; |
Siy =S xС . |
Статические моменты выражаются в см3, м3 и т. д. Очевидно, что стати-

16
ческий момент сложного сечения относительно некоторой оси равен сумме статических моментов всех частей этого сечения относительно той же оси.
Относительно любой оси, проходящей через центр тяжести сечения, статический момент равен нулю.
Таблица 2. Центры тяжести некоторых однородных тел
Плоская фигура Площадь
Положение центра тяжести
|
Прямоугольник |
|
1 AE |
|
y |
|
|
xC = |
|
B |
|
D |
||
|
|
2 |
||
yC |
|
|
C |
|
|
|
|
S=AB·BD |
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
yC = |
|
1 |
AB |
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
A |
|
|
|
|
E |
x |
|
|
|
2 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
xC |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
Треугольник |
|
|
|
|
|
|
|
CE = |
1 |
h |
|
|
|
|||||
y |
B |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
1 |
|
|
|
3 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
C |
|
h |
|
S = |
AD h xC = |
|
1 |
|
(xA + xB + xD ) |
|||||||||
|
|
|
|
|
2 |
3 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
А |
E |
D |
x |
|
|
yC = |
1 |
|
(yA + yB + yD ) |
||||||||||||
|
|
|
3 |
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
Круговой сектор |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
R |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
sin α |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
C |
|
|
|
|
S = αрадR 2 |
OC = 3 |
R αрад |
|||||||||||
|
О |
α |
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Полукруг α = |
π |
|
|
|
|
|
|
|
||||
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= |
1 |
π 2 |
OC = |
4 |
|
R |
|
|
|
С |
|
|
|
|
|
||||
|
О |
|
|
S |
|
2 |
R |
|
3 |
|
π |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|

17
ЗАДАЧИ К КОНТРОЛЬНЫМ ЗАДАНИЯМ
КОНТРОЛЬНАЯРАБОТА№1
СТАТИКА
ЗАДАЧА С1. РАВНОВЕСИЕ РАМЫ ПОД ДЕЙСТВИЕМ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
На жесткую раму, закрепленную в точке А шарнирно, а в точке В прикрепленную или к невесомому стержню или к шарнирной опоре на катках (стержень прикреплен к раме и к неподвижной опоре шарнирами), действуют: сосредоточенные силы F1 , F2 , пара сил с моментом М и равномерно распределенная нагрузка интенсивности q . Определить реакции опор, пренебрегая весом рамы и стержней (рис. 0–9, табл. 3).
Указания. Эта задача на равновесие тела под действием плоской системы сил. Составляя уравнения равновесия, желательно учесть, что уравнение моментов будет более простым (содержать меньше неизвестных), если брать моменты относительно точки А, где приложены две составляющие реакции шарнира. При вычислении момента сил F1 и F2 часто удобно разложить их на составляющие параллельно осям координат и воспользоваться теоремой Варинь-
она: mO (F ) =mO (Fx ) +mO (Fy ) .
Таблица 3
Предпоследняя цифра шифра |
|
|
|
|
|
|
|
Исходные данные |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
град |
|
|
|
F |
, кН |
|
F |
, кН |
М, кН м |
|
q , кН/м |
а, м |
в, м |
β, град |
α, |
|
1 |
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
||||
0 |
10 |
40 |
1 |
|
12 |
1 |
10 |
30 |
45 |
||||
|
|
|
|
|
|
|
|
|
|
||||
1 |
20 |
30 |
2 |
|
8 |
3 |
8 |
45 |
60 |
||||
|
|
|
|
|
|
|
|
|
|
||||
2 |
30 |
20 |
3 |
|
6 |
5 |
6 |
60 |
45 |
||||
|
|
|
|
|
|
|
|
|
|
||||
3 |
40 |
10 |
4 |
|
4 |
7 |
4 |
45 |
30 |
||||
|
|
|
|
|
|
|
|
|
|
||||
4 |
10 |
40 |
5 |
|
2 |
9 |
2 |
30 |
45 |
||||
|
|
|
|
|
|
|
|
|
|
||||
5 |
20 |
30 |
6 |
|
12 |
1 |
10 |
45 |
60 |
||||
|
|
|
|
|
|
|
|
|
|
||||
6 |
30 |
20 |
7 |
|
8 |
3 |
8 |
60 |
45 |
||||
|
|
|
|
|
|
|
|
|
|
||||
7 |
40 |
10 |
8 |
|
6 |
5 |
6 |
45 |
30 |
||||
|
|
|
|
|
|
|
|
|
|
||||
8 |
10 |
40 |
9 |
|
4 |
7 |
4 |
30 |
45 |
||||
|
|
|
|
|
|
|
|
|
|
||||
9 |
20 |
30 |
10 |
|
2 |
9 |
2 |
45 |
60 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|

18
|
|
|
|
В |
|
|
|
q |
а |
|
|
|
|
|
|
M |
|
|
|
|
а |
|
|
|
|
2в |
2в |
|
β |
|
|
|
|
||
2а |
α |
F1 |
|
|
F2 |
|
|
|
|
||
|
|
|
|
|
|
а |
|
|
|
|
|
|
А |
|
|
0 |
|
|
|
|
|
|
|
|
|
в |
3в |
|
|
А |
|
β |
|
|
а |
|
|
F2 |
F1 |
|
|
|
|
|
α |
а |
|
|
|
|
q |
|
2а |
|
|
|
|
|
|
|
|
|
M |
|
|
|
|
В |
|
|
|
2 |
|
|
|
2в |
|
|
|
|
в |
2в |
|
|
|
|
|
|
В |
|
|
|
F |
β |
|
|
|
q |
2 |
|
|
|
|
2а |
|
|
|
F |
|
α |
|
|
|
1 |
|
M |
а |
|
|
А |
|
|
|
||
|
|
|
|
|
|
|
2в |
2в |
|
|
4 |
|
|
2в |
|
В |
|
|
q |
2а |
|
|
β |
|
|
F2 |
M |
F1 |
а |
А |
|
α |
|
|
|
|
2в |
2в |
|
|
1 |
|
В |
|
|
|
F1 |
α |
а |
|
|
|
|
а |
F2 |
|
|
|
|
|
|
M |
|
|
β |
|
|
|
|
q |
а |
3 |
|
в |
в |
А |
|
|
|
|
|
|
|
2в |
2в |
|
q |
|
|
M |
|
2а |
|
|
а |
|
|
|
а |
|
|
|
|
|
β |
|
|
|
F1 |
В |
F2 |
2а |
α |
|
|
|
|
А |
|
|
5 |
|
|
|
|

2в |
2в |
|
M |
|
q |
А |
α |
|
а |
|
|
F1 |
|
|
|
|
|
а |
2в |
|
|
|
|
|
β |
В |
|
|
|
6 |
F2 |
|
|
|
|
|
F |
β |
M |
2 |
А |
|
||
|
|
|
|
3в |
в |
3а |
|
|
|
2в |
в |
q |
α |
В |
|
||
8 |
F1 |
|
|
|
19
|
2в |
|
2в |
q |
|
|
|
|
|
|
α |
|
β |
|
а |
|
F2 |
|
|
F1 |
|
2а |
||
|
|
|||
|
|
|
|
|
3а |
M |
|
|
А |
|
|
|
|
|
|
В |
|
|
|
|
|
|
|
7 |
|
|
3в |
|
|
|
В |
|
α |
|
|
|
|
|
|
|
|
M |
F1 |
2а |
|
|
|
||
|
q |
|
|
F2 |
|
А |
|
а |
|
|
|
|
β |
|
|
|
|
|
|
|
2в |
|
2в |
|
|
|
|
|
9 |
ПРИМЕР РЕШЕНИЯ ЗАДАЧИ С1.
ДАНО: F1 = 4 кН, F2 =16 кН, M =5 кН м, q = 2 кН/м, a = 2 м, в = 3 м,
α =30o, β = 45o. На рис. С1.1 показана схема рамы. НАЙТИ: реакции опор А и В.
РЕШЕНИЕ Рассмотрим равновесие рамы АВ (рис.С1.1).
Приняв за центр моментов точку А (точка пересечения двух неизвестных реакций в подшипнике), направим координатные оси как показано на рисунке.