

2853
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования Воронежская государственная лесотехническая академия
ГЕОДЕЗИЯ
Руководство по автоматизированной обработке материалов полевых измерений различных видов съёмок с помощью ЭВМ
Методические указания к выполнению лабораторных работ для студентов специальностей 260400 (250201) – Лесное хозяйство и 260500
(250203) – Садово-парковое и ландшафтное строительство
Воронеж 2007
2
УКД 528:681
Кондрашова, Е.В. Руководство по автоматизированной обработке материалов полевых измерений различных видов съёмок с помощью ЭВМ [Текст]: методические указания к выполнению лабораторных работ для студентов специальностей 260400 (250201) – Лесное хозяйство и 260500 (250203) – Садовопарковое и ландшафтное строительство / Е.В. Кондрашова, Т.В. Скворцова, А.В. Скрыпников; Фед. агентство по образованию, ГОУ ВПО «ВГЛТА». − Во-
ронеж, 2007 −28 с.
Печатается по решению редакционно-издательского совета ГОУ ВПО «ВГЛТА»
Рецензент канд. техн. наук, доц. ВГТУ В.В. Пешков
3
ВВЕДЕНИЕ
Сегодня на рубеже тысячелетий, «электронная Земля» и «электронная Россия» являются приоритетным направлением научно-технического прогресса. Перспективной возможностью улучшения ситуации в области геодезии является разработка и внедрение программных средств. В настоящее время специалисты лесного комплекса должны иметь достаточно глубокие знания при работе с компьютером для автоматизации вычислительного процесса по обработке материалов полевых измерений различных видов съёмок. Применение автоматизированной обработки позволит сократить затраты аудиторного и внеаудиторного времени.
Цель методических указаний – самостоятельная работа студента, осознанность изучения дисциплины.
В методических указаниях даются необходимые объяснения по автоматизированной обработке материалов с помощью ЭВМ следующих видов съёмок:
1)теодолитной;
2)тахеометрической;
3)геометрического нивелирования.
Предлагаемый способ, основанный на электронных таблицах Excel, продемонстрировал наглядность, простоту и работоспособность на примерах обработки значительных объёмов данных полевых измерений. Он также применим и оправдан в случае достаточно большого числа станций.
4
1. ТЕОДОЛИТНАЯ СЪЁМКА («Ведомость вычисления координат»).
Теодолитная съёмка – это горизонтальная (контурная) съёмка местности, в результате которой может быть получен план с изображением ситуации местности без рельефа. Применяется в равнинной местности в условиях сложной ситуации и на застроенных территориях. Съёмочным обоснованием теодолитной съёмки являются теодолитные ходы: замкнутые и разомкнутые (диагональные).
Теодолитная съёмка включает в себя работы: подготовительные (подбор и изучение картографических материалов), полевые (рекогносцировка местности, прокладка теодолитных ходов и полигонов, съёмка ситуации) и камеральные (автоматизированная обработка и графические построения).
Автоматизированная обработка сводится к определению плановых координат вершин теодолитных ходов и площади замкнутого многоугольника (полигона).
1.1 Замкнутый ход (полигон) – сомкнутый многоугольник, обычно примыкающий к пункту геодезического обоснования.
Исходные данные: дирекционный угол исходной точки − α1−2 (◦,′); длины горизонтальных проложений − Si (м)(i =1…6); координаты исходной точки − X1,Y1 (м).
Определите дирекционные углы всех последующих вершин многоугольника, используя значения исправленных внутренних горизонтальных углов βi
β1−2 =126°14′, β2−3 =124°56′, β3−4 =105°06′, β4−5 =146°35′, β5−6 =101°32′, β6−1=115°37′.
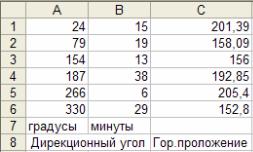
ШАГ 1. Ввод исходных данных (дирекционных углов)
Заполните содержимое ячеек А1:С6 полученными значениями дирекционных углов и длинами горизонтальных проложений, как показано на рис. 1.
Рис. 1. Ввод исходных данных

5
ШАГ 2 Определение приращений производится по формулам прямой и обратной геодезической задач X i = Si cosαi и Yi = Si sin αi .
В ячейку D1 внесите формулу
=С1*COS(РАДИАНЫ(A1+B1/60))
и скопируйте её на диапазон D1:D6, используя маркер заполнения  , находящийся в правом нижнем углу активной ячейки и принимающий форму креста.
, находящийся в правом нижнем углу активной ячейки и принимающий форму креста.
Механизм использования маркера:
-выделяем диапазон D1:D6, подлежащий распространению;
-указатель мыши подводим к маркеру заполнения;
-маркер заполнения захватываем с помощью левой кнопки мыши и протаскиваем до ячейки D6;
-нажатую кнопку мыши отпускаем.
В ячейку Е1 внесите формулу
=С1*SIN(РАДИАНЫ(A1+B1/60))
и скопируйте её на диапазон Е1:Е6, как показано на рис. 2.
Рис. 2. Приращения
Для вычисления периметра полигона выполните автосуммирование  данных диапазона С1:С6.
данных диапазона С1:С6.
Измеренные углы и длины сторон теодолитных ходов содержат неизбежные случайные погрешности, накопление которых приводит к возникновению так называемых невязок. Поскольку полигон имеет вид замкнутого многоугольника, то теоретическая сумма приращений координат по каждой оси должна быть равна нулю, то есть
ΣΔxтеор. = 0 , Σ yтеор. = 0 .
Однако на практике вследствие погрешностей суммы приращений координат равны не нулю, а некоторым величинам f x и f y .

6
Пробейте невязки f x = Σ X i и f y = Σ Yi , используя автосуммирова-
ние  диапазонов D1:D6 и E1:E6, как показано на рис. 3.
диапазонов D1:D6 и E1:E6, как показано на рис. 3.
Рис. 3. Определение невязок
В результате этих невязок полигон, который должен быть замкнутым,
окажется разомкнутым на f абс =  f x 2 + f y 2 .
f x 2 + f y 2 .
В ячейку Е9 для определения невязки по приращениям введите формулу
=КОРЕНЬ(D7*D7+E7*E7)/C7.
Точность угловых и линейных измерений в теодолитном ходе оценивается по величине относительной линейной невязки
f p |
= |
f x 2 + f y 2 |
≤ |
1 |
, |
(1) |
|
P |
P |
2000 |
|||||
|
|
|
|
В ячейку E10 для определения допустимой невязки введите:
=1/2000.
Вычисленная относительная невязка сравнивается с допустимой, величина которой устанавливается в зависимости от масштаба съёмки.
Сравниваем два полученных значения (рис. 4).
Рис. 4. Определение допустимой невязки

7
Если условие выполняется согласно формуле (1), это даёт основание произвести уравнивание приращений координат раздельно по абсциссам и ординатам (в противном случае необходимо искать ошибку в расчётах). Невязки f x
и f y распределяются по вычисленным приращениям координат пропорцио-
нально длинам сторон с обратным знаком по формуле
δx |
= − |
f x |
di , δ y |
= − |
f y |
di , |
(2) |
|
P |
P |
|||||||
i |
|
i |
|
|
|
их значения записывают в ведомости над соответствующими вычисленными приращениями координат.
По вычисленным приращениям координат и поправкам определяются исправленные приращения координат по формуле
xисправ = |
xi +δx , |
yисправ = |
yi +δ y . |
(3) |
i |
i |
i |
i |
|
При распределении невязки используется одно и то же значение, поэтому воспользуйтесь абсолютной ссылкой $. В ячейки F1 и G1 поместите формулы, соответственно:
=D1+(-1)*D$7/C$7*C1 =E1+(-1)*E$7/C$7*C1.
Используя маркер автозаполнения  диапазонов F2:F6 и G2:G6, определите остальные значения исправленных приращений.
диапазонов F2:F6 и G2:G6, определите остальные значения исправленных приращений.
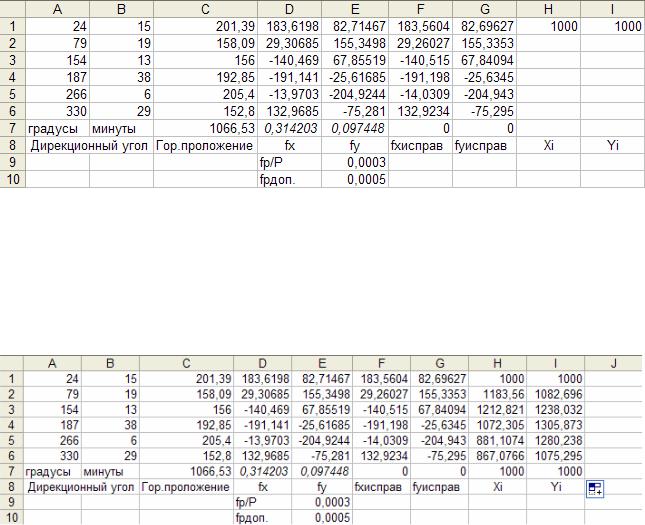
С помощью автосуммы  в ячейки F7 и G7 подбейте невязки f x = 0 и f y = 0 (рис.5).
в ячейки F7 и G7 подбейте невязки f x = 0 и f y = 0 (рис.5).
Рис. 5. Определение исправленных приращений
ШАГ 3. Определение координат вершин полигона X i+1 = X i + X i и
Yi+1 =Yi + Yi .
8
По исправленным приращениям и координатам начальной точки последовательно вычисляют координаты все вершин полигона.
Вячейки с адресами H1 и I1 занесите координаты исходной (первой) точки (рис. 6).
Вячейки с адресами H2 и I2 заносятся формулы:
=H1+F1
=I1+G1
Рис. 6. Определение начальных координат
Используя маркер заполнения  диапазонов H3:H7 и I3:I7, определите последующие координаты. Окончательным контролем правильности вычислений координат служит получение координат начальной точки теодолитного хода (рис. 7).
диапазонов H3:H7 и I3:I7, определите последующие координаты. Окончательным контролем правильности вычислений координат служит получение координат начальной точки теодолитного хода (рис. 7).
Рис. 7. Определение координат
ШАГ 4. Определение площади полигона
n
∑ xi (yi+1 − yi−1 )
n
∑ yi (xi−1 − xi+1 )
|
|
|
. |
|
2 |
2 |
|||
|
||||
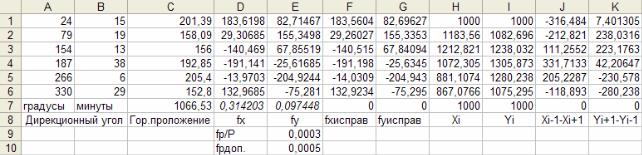
1) Определение разностей координат yi+1 − yi−1 и xi−1 − xi+1.
9
При i=1: x6 − x2 ; y2 − y6 ; i=2: x1 − x3 ; y3 − y1;
i=3: x2 |
− x4 ; y4 − y2 ; |
i=4: x3 |
− x5 ; y5 − y3 ; |
i=5: x4 |
− x6 ; y6 − y4 ; |
i=6: x5 |
− x1; y1 − y5 . |
В ячейки J1:J6 и K1:K6 поместите формулы соответственно:
=H6-H2 |
=I2-I6 |
=H1-H3 |
=I3-I1 |
=H2-H4 |
=I4-I2 |
=H3-H5 |
=I5-I3 |
=H4-H6 |
=I6-I4 |
=H5-H1 |
=I1-I5 |
Сумма полученных разностей координат должна составлять 0. Для проверки правильности решения в ячейках J7 и K7 подбейте автосуммы 
(рис.8).
Рис. 8. Определение разностей координат
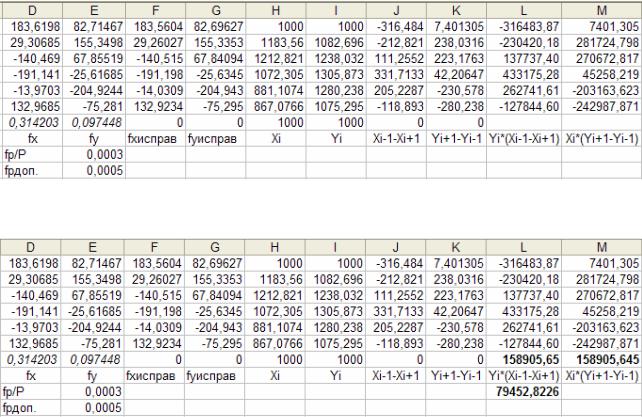
2) Определение произведений координат на разности координат xi (yi+1 − yi−1 ) и yi (xi−1 − xi+1 )
В ячейки с адресами L1 и M1 помещаем формулы соответственно:
=I1*J1 =H1*K1.
Используя маркер заполнения  диапазонов L2:L6 и M2:M6 определите произведения для остальных вершин (рис.9).
диапазонов L2:L6 и M2:M6 определите произведения для остальных вершин (рис.9).
Далее с помощью автосуммы  диапазонов L1:L6 и M1:M6 определите удвоенные площади полигона.
диапазонов L1:L6 и M1:M6 определите удвоенные площади полигона.
10
Затем в ячейку с адресом L9 поместите формулу нахождения площади полигона =L7/2 (рис. 10).
Рис. 9. Определение произведений координат на разности координат
Рис. 10. Определение площадей
1.2. Диагональный ход
Диагональный ход, проложенный между точками основного полигона, уравнивается как ход между двумя исходными пунктами. При этом сохраняется та же последовательность вычислений, что и при обработке результатов измерений в замкнутом теодолитном ходе.
В результате обработки измерений основного полигона получены координаты начальной и конечной точек 4 и 6 диагонального хода и дирекционные углы начальной и конечной сторон 3-4 и 5-6.
Исходные данные: дирекционные углы α3−4 и α6−1 (◦,′); длины горизонтальных проложений − Si (м); координаты точек − X 4 ,Y4 ; X 6 ,Y6 (м).
ШАГ 5. Ввод исходных данных
В ячейки А11 и В11 введите значение дирекционного угла α3−4 :
=A3 и =В3.