

•Repeating Sequence – источник пилообразного сигнала;
•Sine Wave – источник синусоидального воздействия;
•Step – источник перепада сигнала;
•Signal Generator – универсальный сигнал-генератор;
•Clock – источник времени моделирования;
•Digital Clock – цифровой источник времени.
Sinks – раздел блоков получателей сигналов.
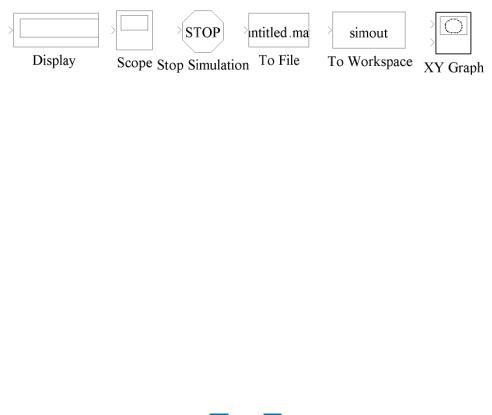
В состав раздела получателей сигнала блоков входят (рис. 6):
•Display – блок, отображающий цифровую информацию (уровень сигнала в данный момент времени);
•Scope – виртуальный осциллограф, предназначенный для получения временных зависимостей (переходныхИпроцессов);
•Stop Simulink – остановка симуляции;
•To File – блок, передающий Двыходной сигнал в другую мо-
дель;
•To Workspace – блок, Апередающий информацию в рабочую область MATLAB;
•XY Graph – виртуальныйбграфопостроитель (построение фазовых портретов и различныхидвухмерных графиков).С
Рис. 6. Блоки раздела Sinks
Дополнительные пакеты расширения Simulink позволяют решать весь спектр задач от разработки концепции модели до тестирования, проверки, генерации кода и аппаратной реализации.
Пакет расширения SimDriveline
SimDriveline – программное обеспечение для проектирования и моделирования трансмиссий или идеализированной системы трансмиссии. Пакет включает готовые блоки для моделирования зубчатых передач, валов, коробок скоростей, трансмиссий, муфт и блоков сцеп-
12

ления. Содержит обширную библиотеку базовых моделей различных компонентов транспортных средств (дизельный и бензиновый двигатели, шасси и т.п.).
Библиотека включает модели вращательных и поступательных компонентов, таких как:
•червячные передачи,
•планетарные механизмы,
•подающие винты,
•муфты.
Пакет SimDriveline позволяет строить системы управления приводом ходового оборудования и рабочих органов всевозможных машин. Модели SimDriveline можно объединять с моделями систем управления Simulink для симуляции динамики. Симуляции можно запускать на рабочем столе (переменный шаг) или в среде реального времени (фиксированный шаг).
|
|
А |
SimDriveline содержит следующиеИбиблиотеки (рис. 7): |
||
Drivelines and Inertias, Gears, Dynamic Elements, Transmissions, Sensors |
||
|
б |
|
and Actuators, Vehicle Components, InterfaceДElements, и Utilities. |
||
и |
|
|
С |
|
|
Рис. 7. Окно пакета SimDriveline
Содержание библиотек SimDriveline
Библиотека Решатели и инерция (Solver and Inertias) содержит следующие блоки:
Окружающая среда (Driveline Environment) – привязка к
окружающей среде.
13

Корпус (Housing) – блок, «запирающий» связанные ком-
поненты трансмиссии и предохраняющий их от вращения.
Инерция (Inertia) – блок, представляющий собой жесткое
вращающееся тело, которое вращается вокруг оси трансмиссии, несущей в себе степень свободы движения. Тело создает вращательный момент инерции относительно этой оси. Блок
«инерция» имеет один порт. Вы можете подключить его к оси трансмиссии от порта к концу оси или ответвлением от главной линии связи к порту.
Общая окружающая среда (Shared Environment) – блок
обеспечивает нефизические связи между двумя независимыми блок-схемами трансмиссии. Блок не содержит инерции, не добавляет степени свободы, не накладывает никаких ограни-
чений, не передает движение или крутящий момент между блоками SimDriveline. Можно использовать этот блок для подключения двух независимых трансмиссии в одной системе.
Библиотека Передачи (Gears) содержит блоки: |
||||
|
|
|
|
И |
Дифференциальная (Differential) – представляет собой |
||||
|
|
|
Д |
|
дифференциал, который преобразует вращательное движе- |
||||
ние относительно продольной оси вращения в движение |
||||
|
|
А |
|
|
вокруг двух боковых осей. Лю ая из осей может являться входом. |
||||
При обычном использован |
продольный вал является входом, а |
|||
|
б |
|
|
|
движение, крутящ й момент |
мощность выходят на боковые валы. |
|||
и |
|
|
|
|
С |
|
|
|
|
Оси вращения на выходе, как правило, обладают различными угловыми скоростями. Перемещение на продольном валу распределяется между двумя боковыми валами с учетом коэффициента передачи, который задается в настройках блока. Дифференциал в трансмиссии часто обладает управляемым сцеплением, соединяющим два выходных вала. Это сцепление добавляется путем подключения блока
«Управляемая фрикционная муфта (Controllable Friction Clutch)».
Переменное передаточное отношение (Variable Ratio
Gear) – коробка передач с управляемым передаточным отношением.
Простой передаточный механизм (Simple Gear) – коробка
передач, которая содержит две оси трансмиссии, ведущуюB и ведомую F. Шестерни могут вращаться как в одном направлении
(ωF и ωB имеют один знак), так и в разных (ωF и ωB имеют разные знаки).
14
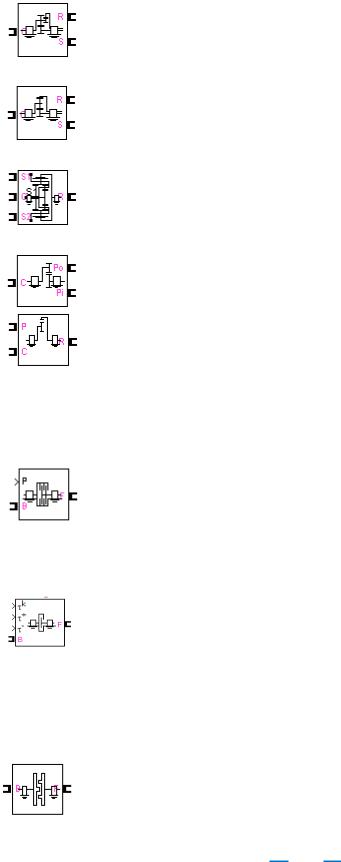
Планетарные передачи – служат для дополнительного увеличения крутящего момента. Состоят из солнечной шестерни, водила, сателлитов и коронной шестерни.
Двойное планетарное отношение (Dual-Ratio Planetary)
Планетарный механизм (Planetary Gear)
Планетарный ряд Равиньо (Ravigneaux)
Кольцо – планета (Ring – Planet)
Планета – планета (PlanetД– Planet)И
Библиотека Динамические элементы (Dynamic Elements) со- |
||
держит блоки: |
и |
А |
|
||
С |
|
|
Управляемая бфр кционная муфта (Controllable Friction
Clutch) - передает крутящий момент между двумя осями трансмиссии при помощи сил трения. Для сцепления необходимо подать сигнал на порт P, характеризующий кинетическое тре-
ние. Этот сигнал должен быть положительным или равным нулю. Отрицательный сигнал интерпретируется как нуль.
Основная фрикционная муфта (Fundamental Friction
Clutch) – передает крутящий момент между двумя осями трансмиссии при помощи сил трения. Основная фрикционная муфта требует наличия трех входных сигналов: кинетический
момент трения, τК≥0; статическое трение верхнего предела крутящего
момента, τ+; статическое трение нижнего предела крутящего момента,
τ-.
Жесткий тормоз (Hard stop) – имитирует тормоз, который
ограничивает относительное угловое перемещение θ двух
15
соединенных между собой осей трансмиссии. Если относительное
угловое перемещение находится в диапазоне между верхним и нижним пределами настройки тормоза, то крутящий момент не изменяется, если же относительное угловое перемещение больше верхнего предела или меньше нижнего предела, то крутящий момент изменяется.
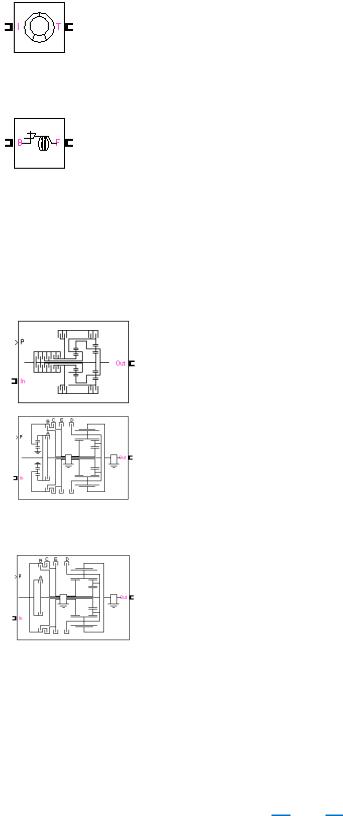
Гидротрансформатор (Torque Converter) – соединяет пару
трансмиссионных осей, передает крутящий момент и угловое перемещение за счет динамического воздействия рабочей жидкости. Порт I представляет собой крыльчатку или насос,
порт T – турбину.
Торсионная пружина-амортизатор (Torsional Spring-
вращающимися осями трансмиссии. Этот крутящий момент –
Damper) – моделирует затухающее скручивание пружины, как крутящий момент, действующийИ между двумя
θ θ - θ
функция относительного угла перемещенияД= F B и относительной угловой скорости ω=ωF - ωB.
Библиотека ТрансмиссииА(Transmissions) содержит блоки:
CR-CR б4-ступенчатая (CR-CR 4-Speed) –
подсистема, состоящая из простого планетарного редуктораис двумя стандартными планетарными передачами на ора передач на входе и выходе.
СЛепелетье 6(7)-ступенчатая (Lepelletier 6(7)-Speed)
– модел рует автомобильную передачу, имеющую шесть (семь) варьируемых передаточных отношений для перемещения вперед и одно передаточное отношение для перемещения назад. В состав подсистемы
входят планетарные передачи и ряд Равиньо.
Равиньо 4-ступенчатая (Ravigneaux 4-Speed) - мо-
делирует автомобильную передачу, имеющую четыре варьируемые передаточные отношения для перемещения вперед и одно передаточное отношение для перемещения назад. Подсистема состоит из рядов Ра-
виньо.
16
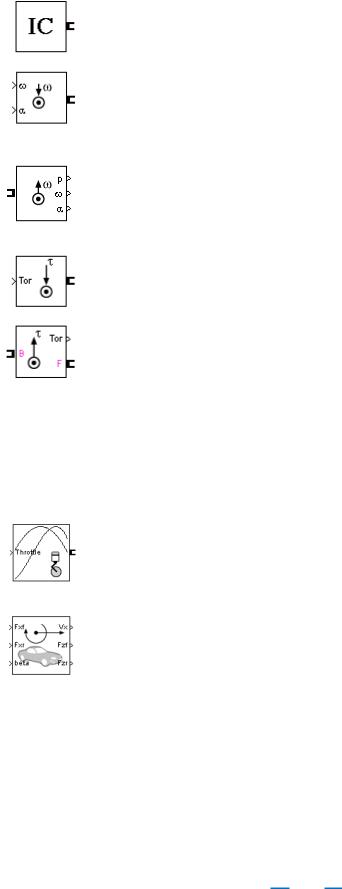
Библиотека Датчики и приводы (Sensors and Actuators) содер-
жит блоки:
Начальное условие (Initial Condition) – подключается к
оси привода и определяет начальное значение угловой скорости этой оси.
Движение привода (Motion Actuator) – приводит в движе-
ние ось трансмиссии с учетом угловой скорости и ускорения. Угловая скорость и ускорение при этом задаются при
помощи Simulink.
Датчик движения (Motion Sensor) – анализирует движение |
|
оси привода. Выводит информацию о движении в виде трех |
|
сигналов для Simulink: угол поворота р, угловая скорость |
|
поворота ω и угловое ускорение α. |
И |
|
|
Крутящий момен привода (Torque Actuator) – подает на
ось трансмиссии крутящий момент. Входной сигнал задает-
ся в виде сигнала Simulink в Н·м. |
|
Датчик крутящего момента (Torque Sensor) – измеряет |
|
|
А |
крутящий момент, передающийся вдоль оси трансмиссии, в |
|
точке, где установлен датчик. Положительный крутящий |
|
б |
|
момент передается от ведущей оси ВДк ведомой F. Показания датчика |
|
выводятся в виде сигнала Simulink. |
|
и |
|
Библиотека Компоненты транспортного средства (Vehicle |
|
Components) содерж т блоки: |
|
Дизельный (бензиновый) двигатель (Diesel (Gasoline) |
|||
Engine) – моделирует дизельный (бензиновый) двигатель |
|||
внутреннего сгорания с регулятором частоты вращения. |
|||
Скорость валаСдвигателя задается сигналом Simulink. |
|
||
Продольное динамическое перемещение транспортного |
|||
средства (Longitudinal Vehicle Dynamics) – моделирует |
|||
продольное |
перемещение |
двухосного |
автомобиля. |
Необходимо задать передние и задние продольные силы Fxf, Fxr на передние и задние колеса, а также угол наклона (beta) в виде сигналов Simulink. Блок вычисляет скорость автомобиля Vx, передние и задние вертикальные силы нагрузки Fzf, Fzr на транспортное средство в виде набора сигналов Simulink.
17

Шина (Tire) – моделирует контакт шины с дорогой. Через
порт трансмиссии передается крутящий момент от оси колеса на шину. Необходимо подать на вход вертикальную нагрузку от автомобиля Fz и его продольную скорость Vx. На выходе
получаем угловую скорость колеса (Omega) и продольную силу Fx.
Библиотека Элементы интерфейса (Interface Elements) содер-
жит блок:
Вращательная связь (Rotational Coupling) – используется
для подключения компонентов SimDriveline к механическим вращательным элементам Simscape Foundation.
Библиотека Утилиты (Utilities) содержит блок:
Порт для подключения (ConnectionИPort) – позволяет Д
создавать порты трансмиссии после подключения к линиям
связи.
Процесс создания моделей в SimDriveLine аналогичен процессу
создания моделей в Simulink.
Пример использования пакета SimDriveline при моделировании |
|
|
б |
механической системы в приложении 1. |
|
и |
|
Пакет расширенияАStateflow |
|
С |
|
Stateflow является нтерактивным инструментом разработки в области моделирован я сложных, управляемых событиями систем. Он тесно интегрирован с MATLAB и Simulink и основан на теории конечных автоматов.
Stateflow – инструмент для численного моделирования систем, характеризующихся сложным поведением. К числу таких систем относятся гибридные системы. Примерами гибридных систем могут служить системы управления, используемые в промышленности (автоматизированные технологические процессы), в быту (сложные бытовые приборы), в военной области (высокотехнологичные виды вооружений), в сфере космонавтики, транспорта и связи. Все эти системы состоят из аналоговых и дискретных компонентов, поэтому гибридные системы – это системы со сложным взаимодействием дискретной и непрерывной динамики. Они характеризуются не только непрерывным изменением состояния системы, но и скачкообразными вариа-
18