

2438
.pdfредатчика до подстилающей поверхности сопоставлялась информация о положении и ориентации лазерного сканера в пространстве. Используя эту информацию, вычисляются точные координаты отражения импульсов лазерного излучения от подстилающей поверхности.
На одной платформе с оптическим блоком лазерного сканера устанавливается цифровой фотоаппарат. Цифровые снимки высокого разрешения в процессе проведения аэросъёмочных работ записываются на жёсткий диск бортового компьютера. Специально разработанные программы и современные компьютеры обеспечивают исключительно высокую скорость записи данных каждого отдельного кадра на жесткий диск компьютера. Благодаря этим усовершенствованиям средний временной интервал между срабатываниями затвора у современных камер составляет 1,9-2,5 секунды, что позволяет обеспечить необходимое взаимное перекрытие крупномасштабных снимков в маршруте при значительной скорости полета.
Задача генерации TTL импульса, поступающего на вход фотограмметрического датчика GPS приемника после каждого срабатывания затвора фотоаппарата, возложена на специально спроектированный и изготовленный генератор синхроимпульсов, совмещенный с блоком питания. Отметки времени во время срабатывании затвора необходимы впоследствии для привязки цифровых фотоснимков.
Всоответствии с российскими и международными нормами по лазерной безопасности, названному выше лазерному сканеру присвоен 4-й класс. Для лазерных приборов 4-го класса предусмотрена установка системы отключения лазера в случае, если расстояние от передатчика до места нахождения возможного стороннего наблюдателя меньше, чем минимально допустимое по безопасности. В лазерном сканере предусмотрены следующие устройства защитного отключения, срабатывающие одновременно:
автоматическая механическая заслонка, установленная на выходе устройства накачки;
автоматическая механическая заслонка, установленная на выходе оптического блока;
автоматическое устройство отключения диода накачки.
Вслучае если носитель лазерного сканера неподвижен в пространстве, импульсы лазерного излучения, которые могут попасть в глаз стороннего наблюдателя, перекрываются. Энергия в этом случае аккумулируется, и для обеспечения должного уровня безопасности минимально допустимая высота полета должна быть многократно
121
увеличена. Специально разработанная программа в составе бортового программно-аппаратного комплекса обеспечивает отключение лазера в случае движения носителя со скоростью, меньшей, чем предельно допустимая.
В процессе проведения аэросъёмочных работ на борту вертолёта работают два оператора. Один управляет лазерным сканером ALTM1210 и контролирует его работу, в то время как второй оператор управляет аэронавигационной системой и контролирует параметры пилотирования. Для управления лазерным сканером ALTM-1210 используется промышленный компьютер производства Husky Computers Limited модели Husky FS/2 и установленное на него штатное программное обеспечение управления и операторского интерфейса OI. Для управления навигационной системой используется программное обеспечение Ozi Explorer, работающее на отдельном навигационном компьютере. Оператор навигационной системы контролирует правильность прохождения полетных линий, выбор соответствующего аэросъёмочным условиям масштаба изображения на экране пилота, отмечает в бортовом журнале успешно отснятые аэросъёмочные полосы.
11.2.4. Контроль отсутствия пропусков в данных
итребуемой плотности покрытия, точность
Впроцессе выполнения аэросъёмочных работ в результате ошибок пилотирования носитель лазерного сканера может отклонится от заданного аэросъёмочного маршрута. Это приводит к появлению областей с недостаточной плотностью покрытия или с полностью отсутствующими данными.
Контроль отсутствия пропусков в данных и требуемой плотности покрытия проводится в программном обеспечении ArcView GIS производства компании ESRI. В случае обнаружения недостаточной плотности покрытия или пропусков в данных отмечаются номера поворотных точек трассы, ограничивающих участки трассы с недопустимо низкой плотностью или с полностью отсутствующими данными. Затем по полученным точкам проектируются полетные линии, по которым необходимо повторить съемку, чтобы восполнить недостающие данные.
Вкомплекс воздушного базирования входит следующее оборудование: лазерный сканирующий дальномер, цифровой фотоаппарат,
122
приёмник GPS, работающий в дифференциальном режиме, и инерциальная навигационная система. Специалисты «ОПТЭН Лтд» доказали, что при корректном выполнении съёмки с использованием лазерного сканера ALTM 1020 или ALTM 1210 фирмы Optech (Канада), в со-
ставе перечисленного выше комплекса, обеспечивается картографирование местности с точностью масштаба 1: 1000.
Значительный объем обрабатываемых лазерных данных, и жесткие требования по скорости обработки накладывают повышенные требования к мощности вычислительных машин, на которых проводился экспресс-анализ (Например, Pentium 4, 1800 Мгц).
Камеральная обработка данных лазерно-локационных
иаэрофотосъемочных работ
11.2.5.Вычисление траекторий и определение точности координат положения маршрутов летательного аппарата
Камеральная обработка данных спутниковых наблюдений и вычисление траекторий полетов летательного аппарата выполняется с помощью программного обеспечения, например, GrafNav v. 6.03. Оценка точности расчета траектории определяется по отчетам программного обеспечения и по сравнению результатов данных лазерного сканирования, полученных в различных маршрутах, а также по результатам сравнения координат точек съёмки с идентичными контрольными точками на трассы. Участки, где погрешности превышают заданные допуски, бракуются и на них выполняется заново аэросъёмка.
11.2.6. Обработка комплексных данных лазерного сканирования
Перед началом первичной обработки данные лазернолокационной съёмки копируются в компьютер. Также копируются данные бортового спутникового приёмника и приемников базовых станций. Производится проверка комплектности и полноты данных, заполняется журнал учёта данных лазерно-локационной съёмки. В целях обеспечения резервирования данных, выполняется архивное копирование всех типов данных.
Первичная обработка исходных лазерно-локационных данных проводится с применением программного обеспечении лазерного
123

сканера, например, Realm v. 3.1. В результате первичной обработки отраженных импульсов лазерного излучения от подстилающей поверхности получаются массивы координат точек.
11.2.7. Тематическая обработка
Операции тематической обработки.
Входными данными тематической обработки являются: неразделенный массив лазерных отражений от земной поверхности и всех объектов в единой системе координат WGS84, а также ортофотоплан (см. рис. 11.2,б).
Входной контроль данных лазерного сканирования
На этой стадии проверяется:
полнота покрытия данными съемки заданной полосы местности;
достаточность плотности лазерных отражений для достижения требуемой точности;
точность согласования лазерных данных, полученных в различных заходах носителя.
Только после выполнения всех проверок данные лазерного сканирования передаются на тематическую обработку. В частности, в поступающих на тематическую обработку лазерных данных расхождение высот данных, полученных в различных заходах вертолетаносителя, не должныпревышать 0,2м.
Разделение лазерных отражений на два класса:
1)отражения от земной поверхности;
2)отражения от объектов, расположенных на земной поверхности.
Выполняется автоматическая классификация лазерных данных на отражения от земной поверхности и отражения от объектов. Результаты автоматической классификации корректируются оператором, после чего формируется цифровая модель рельефа.
124
Выделение различных классов объектов (из класса отражений от объектов)
Выделение производится на основе лазерных отражений и ортофотоснимков. Выполняется «ручная» и автоматизированная клас-
сификация лазерных данных. Формируются контуры объектов.
11.2.8. Обработка цифровых фотоснимков
Обработка цифровых фотоснимков производится по следующему алгоритму:
Фотокалибровка.
Получение файлов привязки.
Трансформирование фотоснимков на плоскую поверхность с пониженным разрешением.
Отбор фотографий.
Создание матрицы рельефа по данным лазерного сканирования.
Трансформирование отобранных фотографий, по данным ЭВО и матрицы рельефа, с разрешением отвечающим требованиям целевой задаче.
Создание фотомозаики и оформление ортофотопланов.
Для аналитического трансформирования снимков используются
алгоритм на основе аналитических зависимостей, в которых в качестве исходных данных выступают:
элементы внутреннего ориентирования снимка – f, xº, yº;
элементы внешнего ориентирования (ЭВО) снимка (угловые - ,
, и линейные Xs,Ys, Zs координаты центра фотографирования);
матрица рельефа.
11.3. Программный комплекс ALTEXIS
Программный комплекс ALTEXIS разработан компанией "Геокосмос" и предназначен для обработки данных комбинированной воздушной лазерно-локационной и цифровой аэрофотографической съемки, а также для метрологического обеспечения аэросъемочных работ с использованием лазерно-локационной аппаратуры. программного комплекса ALTEXIS. Версия 2.0 является дальнейшим развитием линейки программных продуктов семейства ALTEXIS компании "Геокосмос", используемой в качестве базового программного сред-
125
ства обработки геопространственных данных как элемента геоинформационной технологии крупномасштабного картирования реального времени, предложенной и активно развиваемой компанией "Геокосмос" в последние годы.
Программный комплекс ALTEXIS выполняет задачи по метрологическому обеспечению аэросъемочного комплекса, в частности, по проведению калибровочной процедуры лазерного локатора и цифрового аэрофотоаппарата, он может быть использован для контроля качества пилотирования и оценки степени достоверности собранных аэросъемочных данных. Кроме того, ALTEXIS реализует широкий набор алгоритмов камеральной обработки аэросъемочных данных: геоморфологический анализ и выделение рельефа, создание ортофотокарт, автоматическая селекция лазерных точек, выделение географических объектов, моделирование ЛЭП, оценка лесотехнических параметров и многое другое.
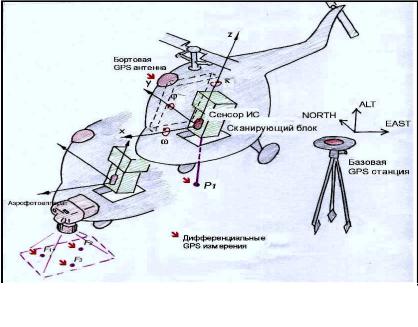
Необходимым условием при проведении работ по лазернолокационной съёмке является точное определение параметров взаимного положения и ориентации на борту носителя компонентов, участвующих в получении аэрофотосъёмочных данных, - сенсора инерциальной системы, фазового центра GPS – антенны, центра проекции и оптической оси фотокамеры. Требования к точности определения указанных параметров чрезвычайно высоки. Точность для линейных
величин не хуже 1- 2 см, для угловых – не хуже 2-3 мрад. Для определения выставочных (offset) параметров сканерного блока и антенны GPS используется про-
грамма Off-Setter,
реализующая методику измерений, представленную на рис. 11.3. Определение в программе
полностью формализовано. Пользователю необходимо лишь выпол-
126
нить определение пространственных координат набора характерных точек (см. рис. 11.3) и полученные результаты занести в соответствующие поля программы вместе со значениями углов текущей ориентации сенсора инерциальной системы в момент проведения измерений. Измерения пространственных координат характерных точек выполняется GPS-приёмниками в локальной вспомогательной системе координат без привязки к ГГС.
По аналогичной методике с помощью программы Off-Setter определяются точные относительные координаты центра проекции фотоаппарата и приближённые значения углов ориентации его оптической оси во внутренней системе координат сенсора инерциальной системы. Точные значения углов ориентации, необходимые для выполнения ортотрансформирования аэрофотоснимков, определяются только в результате выполнения лётной калибровочной процедуры, после выше упомянутой первой калибровки. Для обработки результатов такой процедуры используется программа Calibry, что обеспечивает точность угловых параметров для прямого геопозиционирования аэрофотоснимков.
В ходе калибровочной процедуры выполняется съёмка калибровочного объекта с одновременым использованием как лазерного сканера, так и фотоаппарата. По полученным лазерно-локационным данным объекта в программе Calibry определяются пространственые координаты опознаков. После того как оператором выделено достаточное количество ознаков на аэрофотоснимке и лазернолокационном изображении, и определены их пространственные координаты, программа автоматически вычисляет точные значения угловых паметров.
Действительно, абсолютное ориентирование аэрофотоснимка в геодезическом пространстве может быть выполнено методом обратной фотограмметрической засечки по выделенным опознакам.
11.4.Основные возможности воздушных сканеров ALTM
Фиксация интенсивности отраженного сигнала (возможность работы в ночное время).
Фиксация до 4 отражений одного посланного импульса (возможность разделения верха растительности и поверхности земли).
Самая высокая производительность из коммерчески доступных систем на сегодняшний день – 1000 кв.км. за рабочий день.
127

Совместимость с цифровыми аэрофотоаппаратами и другими сенсорами и датчиками;
Возможность использования с приемниками GPS и GPS/GLONASS различных производителей.
Наличие согласованной схемы установки на отечественные летательные аппараты.
Адаптация к российским условиям.
Экономическая эффективность использования в тех условиях, когда применение других методов крайне затруднительно, невозможно или ограничено сезонными факторами (безориентирная местность, сплошная листва, очень «плоский» рельеф и т.д.).
|
|
|
|
|
|
|
Лазерный сканер ALTM |
||
|
|
|
|
|
|
(рис. 11.4) включает: |
|
||
|
|
|
|
|
|
|
Бортовой навигационный |
||
|
|
|
|
|
|
|
комплекс. |
|
|
|
|
|
|
|
|
|
Бортовой комплекс геодези- |
||
|
|
|
|
|
|
|
ческого обеспечения |
||
|
|
|
|
|
|
|
GPS/GLONASS. |
|
|
|
|
|
|
|
Приемник GPS Trimble 750. |
||||
|
Рис. 11.4. Комплект ALTM |
|
|
||||||
|
|
|
|
|
|
||||
|
|
Основные технические параметры |
|
||||||
Наименование параметра |
|
|
|
|
ALTM 30/70 |
|
ALTM 3100 |
||
Частота зондирующих импульсов |
|
|
|
|
33 кГц |
|
33 кГц |
||
|
|
|
|
|
|
|
50 кГц |
|
50 кГц |
|
|
|
|
|
|
|
70 кГц |
|
70 кГц |
|
|
|
|
|
|
|
|
|
100 кГц |
Высота полета при съемке |
|
|
|
|
от 200 до 3000 м |
от 80 до 3500 м |
|||
Точность сканирования по высоте |
|
|
|
не хуже 15 см |
не хуже 15 см |
||||
|
|
|
|
при высоте 1200 м |
при высоте 1200 м |
||||
|
|
|
|
|
|
не хуже 35 см |
не хуже 25 см |
||
|
|
|
|
при высоте 3000 м |
при высоте 2000 м |
||||
|
|
|
|
|
|
|
|
не хуже 35 см |
|
|
|
|
|
|
|
|
|
при высоте 3000 м |
|
Регистрация данных |
|
|
|
|
Переносной жесткий диск |
------ |
|||
|
|
|
|
|
|
|
(37 Гбайт) |
|
|
Расходимость |
|
|
|
|
Двойная: |
|
Двойная |
||
лазерного луча |
0,2 мрад или 0,7 мрад |
0,3 мрад или 0,8 мрад |
|||||||
Диапазон рабочих температур: |
|
|
|
|
|
|
|
||
- Сканирующий блок: |
|
от -20 °C до +35 °C |
от -10 °C до +35 °C |
||||||
- Стойка управления: |
|
от +10 °C до +35 °C |
от +10 °C до +35 °C |
||||||
- при термостабилизации |
|
от -30 °C до +55 °C |
от -30 °C до +55 °C |
||||||
|
|
|
|
128 |
|
|
|
||
Габариты/Вес
- Сканирующий блок 25 W x 32 L x 56 H см/20 кг 26 W x 19 L x 57 Hсм/23,4 кг - Стойка управления 59 W x 58 L X 49 H см/55 кг 65 W x 59 L X 49 Hсм/53,2 кг
Общие параметры |
|
|
Точность определения планового |
лучше чем 1/2000 от высоты |
|
положения точек |
|
|
Ширина полосы съемки |
|
от 0 (режим профайлера) до |
|
|
93% от высоты съемки |
Разрешение по дальности |
|
1 см |
Количество регистрируемых |
|
4, включая последний |
отражений лазерного импульса |
|
|
Регистрация интенсивности |
|
12 бит динамический диапазон |
|
|
для каждого измерения |
Угол сканирования |
|
от 0 до + 25° |
Компенсация крена |
|
Номинально ±5°, в зависимости от текущего |
|
|
значения поля зрения (например, при ±15° |
|
|
допустимое значение компенсации ±10°) |
Ширина полосы захвата |
|
От 0 до 0,93x H м |
Частота сканирования |
|
0 – 70 Гц, зависит от угла |
|
|
сканирования |
Распределение отражений |
|
Равномерное на протяжении |
на поверхности земли |
|
96% линии сканирования |
Используемый бортовой |
|
Applanix POSAV, модифицирован |
навигационный комплекс |
|
|
Бортовой GPS приемник |
|
Trimble 750 |
Категория лазера |
|
Class 4 |
Высота безопасного зрения |
|
200 м при 0,7 мрад 400 м при 0,2 мрад |
Потребление |
|
28 В переменного тока, 24 А в среднем, |
|
|
35 А пиковое потребление |
Влажность |
|
0 – 95% без конденсата |
Перечень программного обеспечения |
||
Программное обеспечение |
Назначение |
|
REALM Survey Suite |
Получение дифференциального |
|
|
кинематического GPS решения. |
|
|
Оптимизация траектории при |
|
|
использовании нескольких базовых |
|
|
станций. Вычисление XYZ координат |
|
|
лазерных точек. Селекция лазерных |
|
Applanix PosGPS |
точек, выделение земли и растительности. |
|
Совместная обработка GPS/GLONASS и |
||
Applanix PosProc |
инерциальных данных. |
|
Планирование и управление |
||
ALTM-NAV |
аэросъемочным процессом. |
|
|
|
129 |
Регистрация формы отраженной волны. Такая опция представляется чрезвычайно полезной для лазерных локаторов импульсного типа. Ее можно рассматривать как дальнейшее развитие технологии измерения нескольких отраженных импульсов в каждом акте сканирования, которая уже давно вошла в практику.
Последние разработки компании Optech ALTM 30/70 обеспечивает регистрацию четырех откликов для каждого зондирующего импульса, гарантированно включая первый и последний. Технология регистрации формы отраженной волны предполагает запись в цифровом виде полной формы отклика на каждый зондирующий импульс с частотой дискретизации 1 ГГц и выше. Зарегистрированная таким обра-
зом волна дает «историю» отражения зондирующего импульса от всех препятствий, встретившихся на его пути. Аппаратная реализация такой возможности не представляет проблемы для ведущих производителей, в частности, такая опция уже поставляется штатно в уже упомянутом лазерном сканере ALTM 30/70 фирмы Optech. В результате можно, кроме картографирования объекта,
получить его трехмерный образ (рис. 11.5).
Наибольший интерес такая информация может представлять для использования в специализированном программном обеспечении обработки лазерно-локационных данных для более достоверного распознавания и геопозиционирования объектов различных классов.
Использование лазерно-локационных методов открывает ряд принципиально новых возможностей при дистанционном обследовании лесных массивов. Высокая производительность лазернолокационной съемки (150 – 200 кв км или 300 – 400 км линейных объектов за один аэросъемочный день) в сочетании с пространственным разрешением и точностью до 15 см позволяют создавать эффективные алгоритмы морфологического анализа, обеспечивающие автоматическое выделение ряда важнейших информационных параметров лесного массива.
Известно, что использование традиционных аэросъемочных технологий сильно затруднено как для измерения истинного рельефа
130