

КТПСА_лаб1
.docxМИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ УКРАИНЫ
ХАРЬКОВСКИЙ НАЦИОНАЛЬНЫЙ УНИВЕРСИТЕТ РАДИОЭЛЕКТРОНИКИ
Кафедра СТ
Отчет по лабораторной работе № 1 по дисциплине: «Компьютерные технологии проектирования систем автоматики»
Выполнили: Проверил:
Ст. гр. АКТСИу-16-1 доцент каф. СТ
Мацегора А. С. Ребезюк Л.Н.
Ломов А. А.
Харьков 2019
1 ОЦЕНКА КАЧЕСТВА РЕГУЛИРОВАНИЯ
1.1 Цель работы
Ознакомление с основными группами критериев качества (оценивающими точность, запас устойчивости, быстродействие и обобщенные свойства САР). Изучение методики использования интегральных оценок качества при исследовании ошибок систем в типовых режимах движения. Приобретение навыков оценки качества по переходной характеристике и по АЧХ замкнутой системы.
1.2 Индивидуальное задание
Вывести передаточные функции по ошибке Фx(p) для четырех моделей САР при астатизме от нулевого до третьего порядка. При этом начальные значения коэффициентов усиления установить в соответствии с вариантом (см. табл.1.1). Используя два способа определить численные значения коэффициентов ошибок по положению, скорости, ускорению и приращению ускорения (c0, c1, c2, c3). При этом вывести и привести в отчете по практическому занятию формулы расчёта первых четырёх коэффициентов ошибки.
Таблица 1.1 – Варианты индивидуальных заданий
|
Номер варианта |
Значение KI1; KI2; KI3 |
|
для 1-й группы (уск.) |
|
|
5 |
55; 45; 70 |
1.3 Ход работы
1.3.1 Изучить сигнал задания g(t) спроектированный для введения систем в режимы типового движения (файл err_ast3.vsm). Заполнить таблицу 1.2.
Таблица 1.2 – Параметры сигнала задания g(t)
|
1-ая составляющая |
0…0,1 |
0,1…0,6 |
0,6…1,7 |
|
0 |
0,6*1/s |
0,6 |
|
|
2-ая составляющая |
0…0,1 |
0,1…1 |
1…1,7 |
|
0 |
0,36*1/s2 |
0,36 |
|
|
3-ая составляющая |
0…0,1 |
0,1…1,3 |
1,3…1,7 |
|
0 |
0,225*1/s3 |
0,225 |
1.3.2 Приравнивая в структурной схеме (файл err_ast3.vsm) коэффициенты усиления (KI1 & KI2 & KI3), или (KI2 & KI3) или (KI3) к нулю, можно получить модели САР с астатизмом от нулевого до третьего порядков (считая исходную). Проанализировать (качественно) влияние астатизма от нулевого до третьего порядков на сигнал ошибки x(t). На рисунке 1.1 изображены коэффициенты усиления (KI1 & KI2 & KI3) равные нулю, а контурный коэффициент усиления равен 5, расчеты на рисунке 1.2 соответственно.
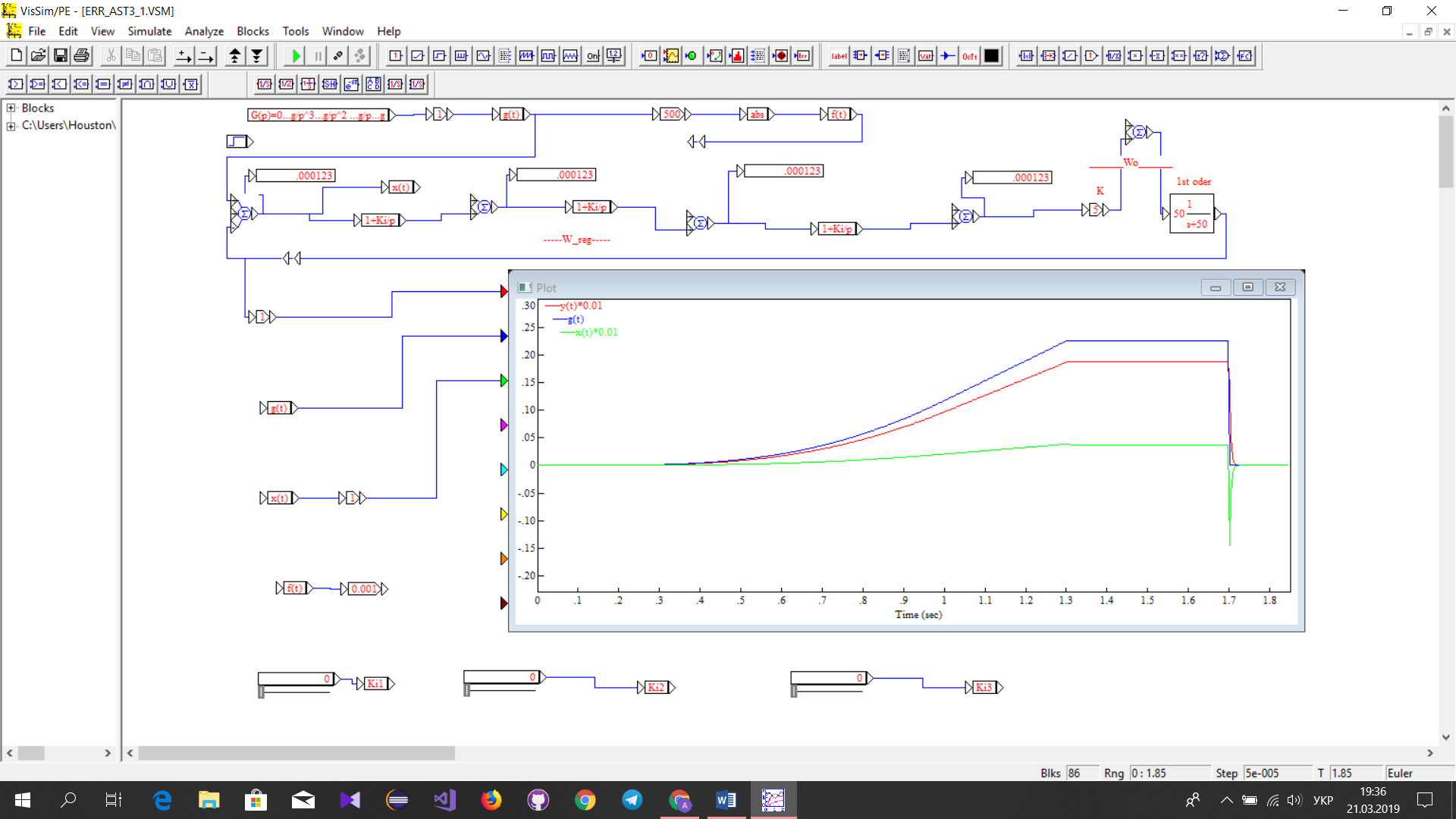
Рисунок 1.1 – показания осциллографа системы с астатизмом 0-го порядка

Рисунок 1.2 – расчеты в Mathcad
На рисунке 1.3 изображены коэффициенты усиления (KI1 & KI2 & KI3) равные нулю, а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.4 соответственно.
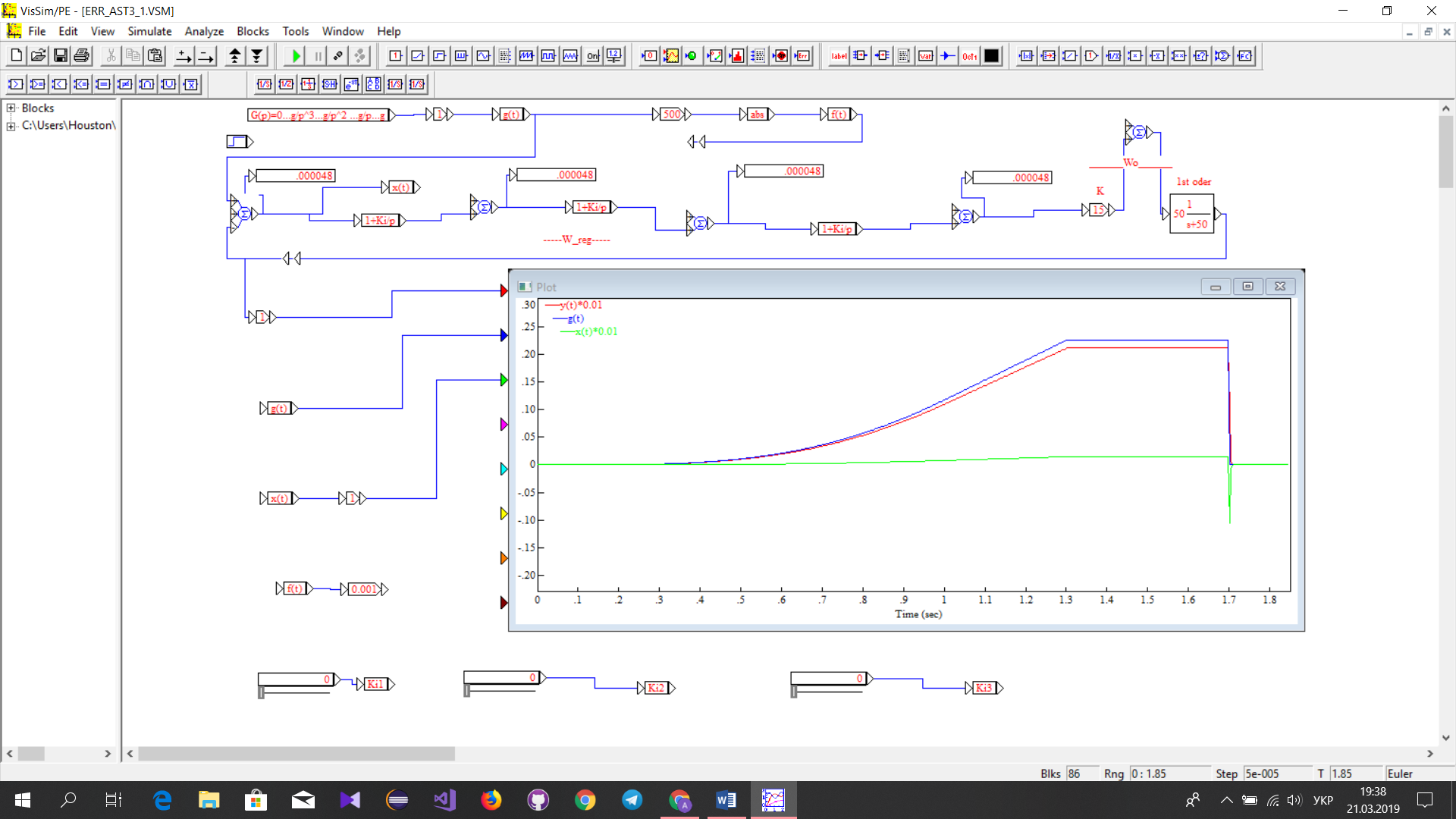
Рисунок 1.3 – показания осциллографа системы с астатизмом 0-го порядка (5-ый вариант)

Рисунок 1.4 – расчеты в Mathcad
На рисунке 1.5 изображены коэффициенты усиления KI1 = 55, а (KI2 & KI3) равные нулю, а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.6 соответственно.
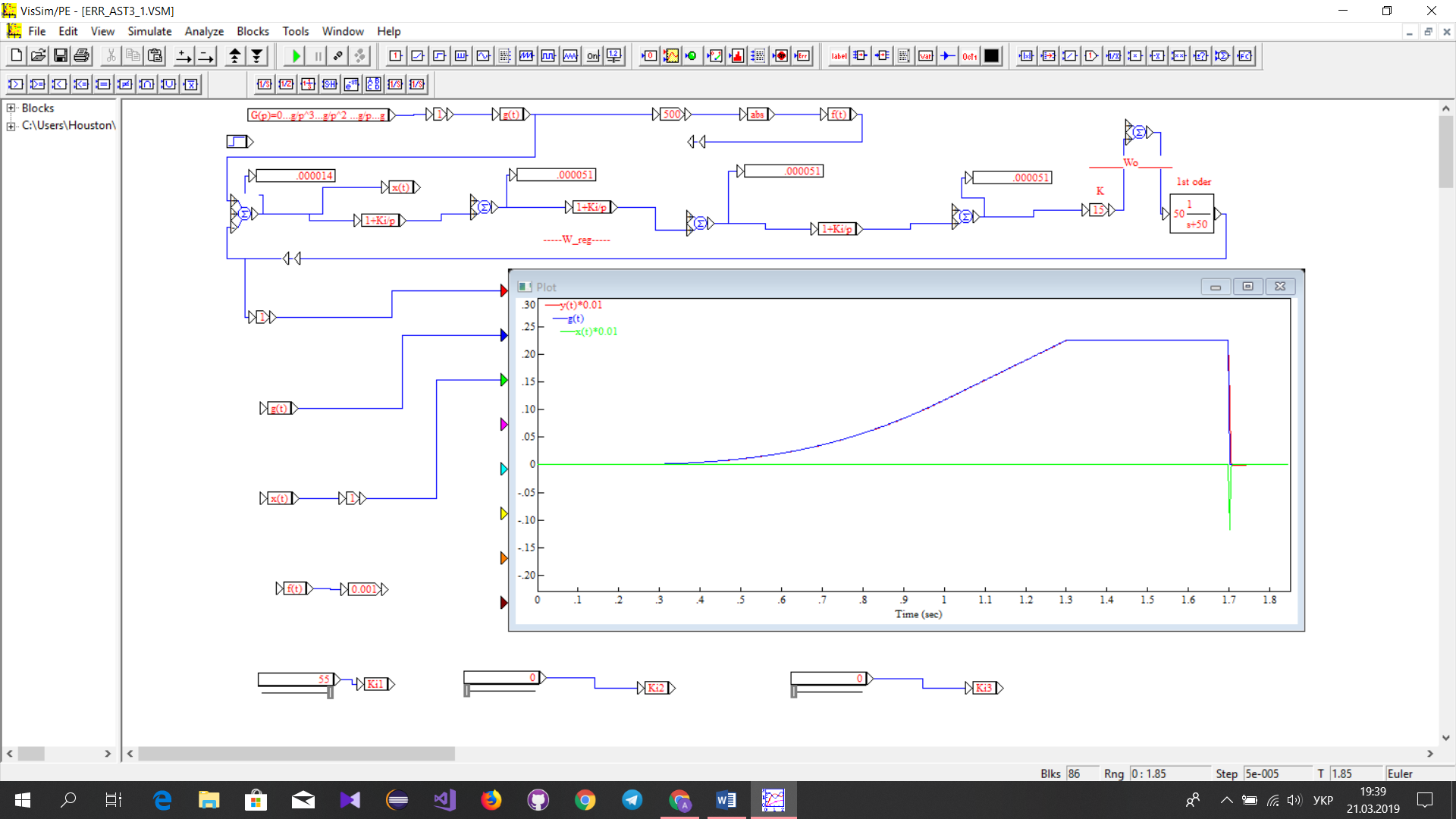
Рисунок 1.5 – показания осциллографа системы с астатизмом 1-го порядка
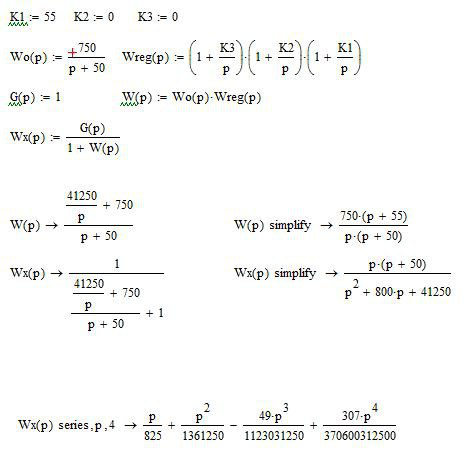
Рисунок 1.6 – расчеты в Mathcad
На рисунке 1.7 изображены коэффициенты усиления (KI1 = 55, KI2 = 45), а KI3 равный нулю, а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.8 соответственно.
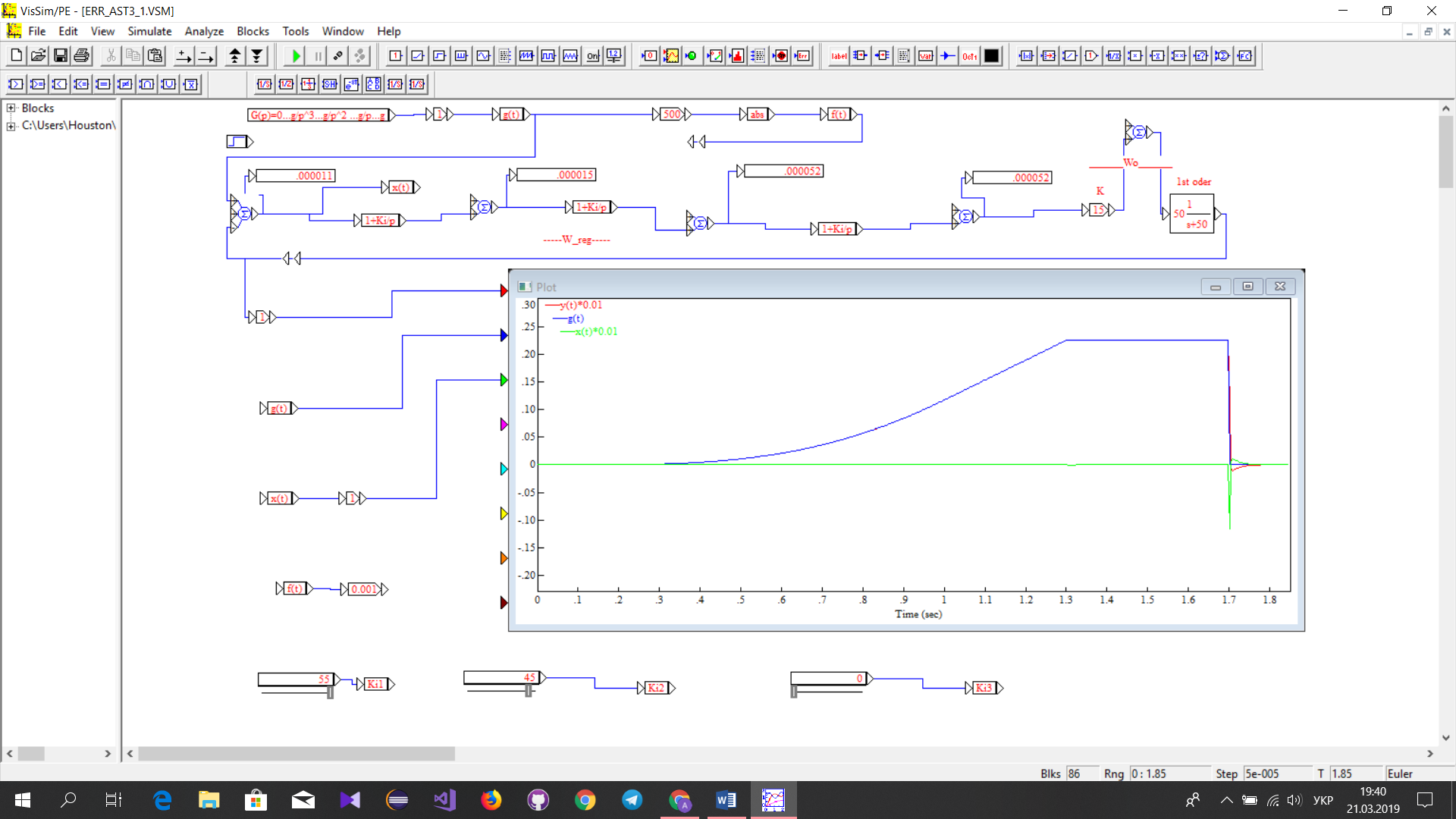
Рисунок 1.7 – показания осциллографа системы с астатизмом 2-го порядка
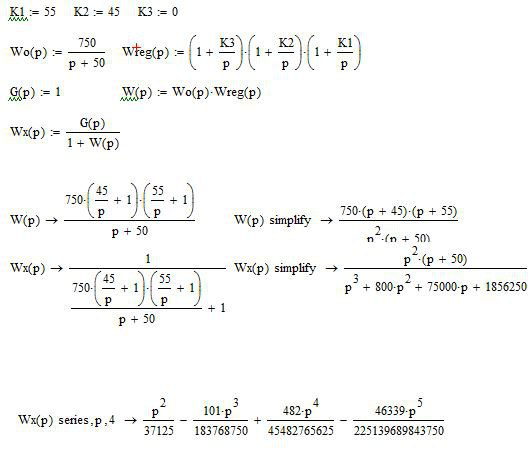
Рисунок 1.8 – расчеты в Mathcad
На рисунке 1.9 изображены коэффициенты усиления (KI1 = 55, KI2 = 45, KI3 = 70), а контурный коэффициент усиления равен 15 (согласно индивидуальному варианту), расчеты на рисунке 1.10 соответственно.
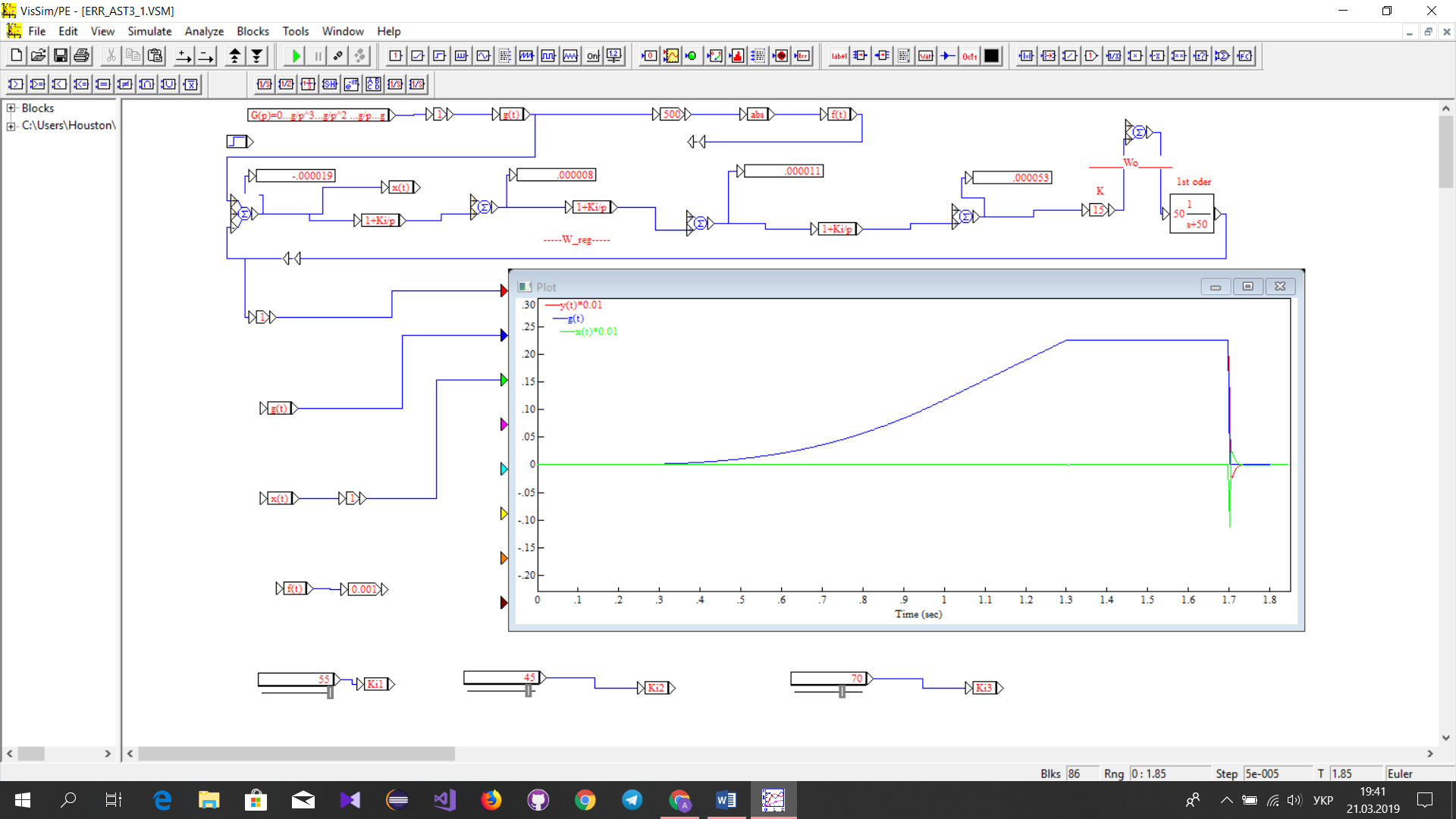
Рисунок 1.9 – Показания осциллографа системы с астатизмом 3-го порядка
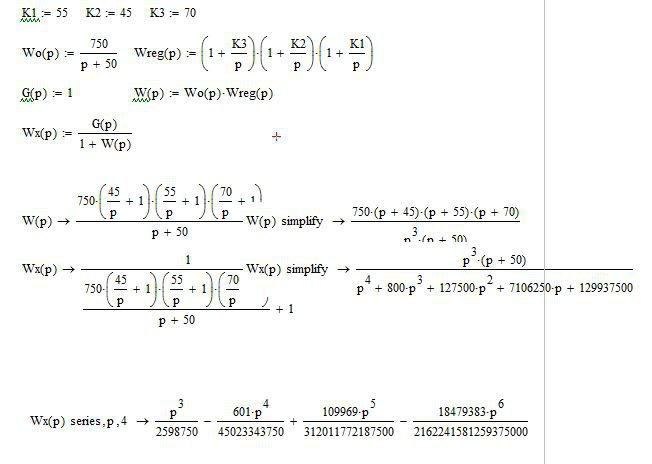
Рисунок 1.10 – Расчеты в Mathcad
Увеличение астатизма с 0-го до 1-го порядка, показывает, что исчезли ошибки по положению, что проявилось на постоянном участке задающего воздействия. При повышении астатизма с 1-го до 2-го порядка (т.е. задействуем звено астатизма К1=55, К2=45, К3=0), отсутствуют ошибки, как на постоянном, так и на линейном участке.
1.3.3. Измерить значения первых четырех установившихся ошибок по: положению 0, скорости , ускорению , и приращению ускорения g''' для систем с астатизмом от нулевого до третьего порядков (файл err_ast3.vsm). Параметры моделей должны соответствовать расчетному заданию. Опираясь на экспериментальные данные определить коэффициент усиления систем в области низких частот K, а также добротности по скорости K, ускорению K и приращению ускорения Kg''' (табл. 1.3).
Таблица 1.3 – Установившиеся ошибки, коэффициент усиления; добротность по скорости, по ускорению и приращения ускорения
|
|
K & С0 |
K & С1 |
K & С2 |
Kg''' & С3 |
|
Астастизм 0-го порядка К1=0, К2=0, К3=0. |
15&
|
|
|
|
|
Астастизм 1-го порядка К1=55, К2=0, К3=0. |
0 |
825&
|
|
|
|
Астастизм 2-го порядка К1=55, К2=45, К3=0. |
0 |
0 |
|
|
|
Астастизм 3-го порядка К1=55, К2=45, К3=70. |
0 |
0 |
0 |
|

 &
& 
 &
&

 &
&


 &
&

 &
&
 &
&

 &
&
 &
&
1.3.4 Оценить запас устойчивости и быстродействие по переходным характеристикам системы (рисунок 1.11, 1.12), при различных настройках ПИД-регулятора, используя показатели качества: перерегулирование , длительность переходного процесса tП, частота колебаний f, допустимое число колебаний, время запаздывания tЗ, время нарастания (min, max) tН. Для определения численных значений параметров необходимо величиной допустимых отклонений 2 задаться самостоятельно или определить по параметрам схемы модели (табл. 1.4).
Таблица 1.4 – Оценка качества управления по переходной характеристике
|
Функция цены оптимальной настройки: |
квадратичная интегральная оценка качества |
улучшенная квадратичная интегральная оценка качества
|
|
Значения параметров оптимально настроенного ПИД-регулятора (по результатам моделирования) |
KP= 80.2285 KI= -721.285 KD= 18.5066 |
KP= 5.2360680001 KI= 17.7759364211127 KD= 1 |
|
Величина допустимых отклонений , % (задаться самостоятельно) |
2 |
|
|
Вычисленные значения параметров |
||
|
перерегулирование , % |
71 |
1% |
|
длительность переходного процесса tП, с. (0.020163084, 0.051890289) |
0.031727205 |
0.064793679 |
|
частота колебаний f, Гц (1/T) (0.020163084, 0.031727205) |
1/0.011564121=8.6474363 |
0.953202431 |
|
число колебаний, |
5 |
3 |
|
время запаздывания tЗ, с. (0.020163084, 0.023721275) |
tз = 0.003558191 |
0.006151883 |
|
min время нарастания tНmin, с. (0.020163084, 0.020756116) |
0.000593032 |
0.002686976 |
|
max время нарастания tНmax, с. (0.020756116, 0.026464047) |
0.005707931 |
0.009956125 |
|
частоту среза С |
704.33122 |
220.0903 |
|
полосу пропускания П |
1049.0622 |
310.77827 |
|
резонансную частотуР |
– |
– |
|
Запас устойчивости по модулю (по амплитуде) |
37 |
20.66667 |
|
Запас устойчивости по фазе |
83 |
54.05 |
Продолжение таблицы 1.4
|
Степень
устойчивости системы автоматического
управления
|
4.3665 |
2.60582 |
|
Колебательность
системы автоматического управления
|
2.814174995188313 |
4.140923010798904 |
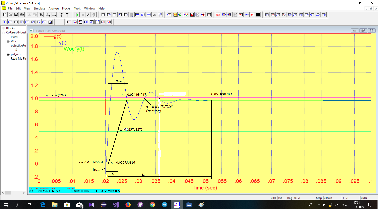
Рисунок 1.11 – Переходная характеристика h(t) (квадратичная интегральная оценка качества)
Рисунок 1.12 – Переходная характеристика h(t) (улучшенная квадратичная интегральная оценка качества)
1.3.7 Для тех же вариантов настроек ПИД-регулятора, используя АЧХ замкнутой системы |Ф(j)| определить показатель колебательности М и показатели быстродействия: резонансную частотуР, полосу пропускания П, частоту среза С, и эквивалентную полосу пропускания Э. Корни нули и корни полюсы, для нахождения степени устойчивости и колебательности системы автоматического управления, изображены на рисунке 1.13,1.14
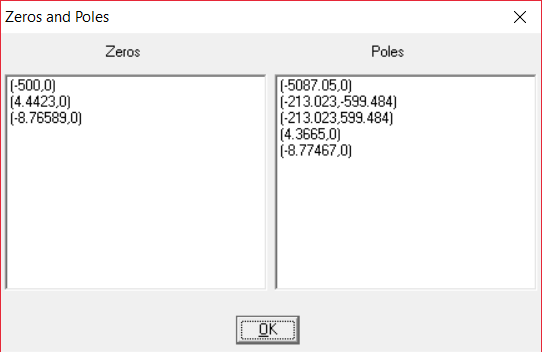
Рисунок 1.13 – Корни нули и корни полюсы характеристического уравнения при интегральной квадратичной оценки качества
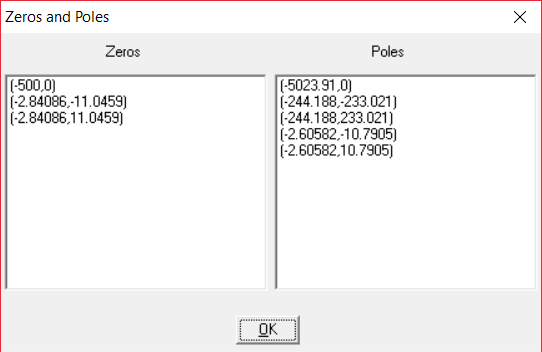
Рисунок 1.14 – Корни нули и корни полюсы характеристического уравнения при улучшенной интегральной квадратичной оценки качества
Степень
устойчивости автоматического
управления![]() определяется
как:
определяется
как:
![]()
Колебательность
системы автоматического управления
![]() определяется
как:
определяется
как:
1.3.8 Для тех же случаев, определить запас устойчивости по амплитуде (модулю) L и по фазе , используя АФХ (годограф Найквиста). Повторить определение по ЛАЧХ & ЛФЧХ (рисунок 1.15, 1.16).
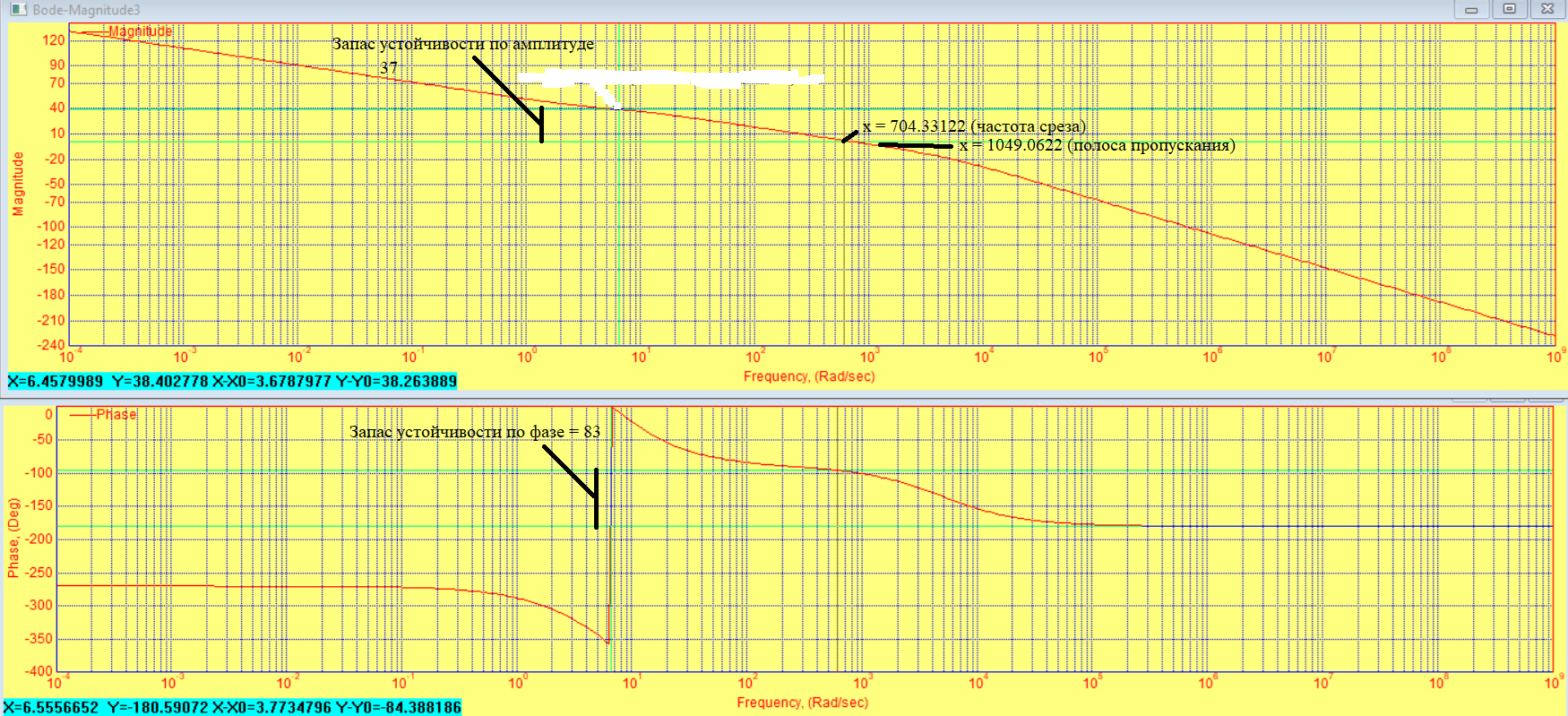
Рисунок 1.15 – ЛАЧХ & ЛФЧХ (квадратичная интегральная оценка качества)

Рисунок 1.16 – ЛАЧХ & ЛФЧХ (улучшенная квадратичная интегральная оценка качества)
ВЫВОДЫ
В ходе лабораторной работы были рассмотрены основные группы критериев качества (оценивающими точность, запас устойчивости, быстродействие и обобщенные свойства САР). А также изучены методики использования интегральных оценок качества при исследовании ошибок систем в типовых режимах движения. Были приобретены навыки оценки качества по переходной характеристике и по АЧХ замкнутой системы.